初级级联直线感应电机的无速度传感器矢量控制
2015-05-25马家庆周大进赵立峰
马家庆, 周大进, 赵立峰, 张 勇, 赵 勇,3
(1.西南交通大学超导与新能源研究开发中心,四川成都 610031;2.西南交通大学磁浮技术与磁浮列车教育部重点实验室,四川成都 610031;3.西南威尔士大学材料科学与工程学院,NSW悉尼 2052)
由于直线感应电动机具有气隙磁场开断特性[1-2],所以无法得到连续的推力.多单元初级分段供电的直线电机运行模式在忽略初级铁芯接头处漏磁的情况下,可近似认为与旋转电机相同,在一定的长度范围内进行速度控制.电机无速度传感器矢量控制是直接测量电机运行的实际速度(旋转电机中是转速)[3],而是给控制器一个指令速度,然后控制器在某种控制策略下,经过一个调节过程后电机的速度达到指令速度[4].
由于级联模式直线电机能在一个较长的运动范围内提供连续的推力,所以这种模式直线电机的性能及控制研究越来越受到重视.
文献[5]提出了级联单边直线感应电机分段供电的方法.文献[6]在重点考虑静态纵向边端效应对该类电机电磁推力、轭部磁场和电机电磁参数带来的影响的基础上,研究了电机的极数与气隙磁场不对称度的关系.文献[7]基于单相绕组的磁动势分布,推导了分段供电直线电机气隙磁场分布的解析表达式.文献[8]针对多定子直线感应电机详细分析了两定子直线感应电机输出电磁推力与输入相电流及工作转差频率之间的函数关系.文献[9]在磁动势观测器的基础上,用估算连续速度与位置方法对直线同步电机进行无速度传感器控制.文献[10]针对长定子直线同步电机的牵引控制,提出了一种无速度传感器算法.文献[11]介绍了适用于电磁弹射的长初级双边直线电机,给出了其在两相同步运动坐标系上的数学模型,建立了按次级磁场定向的矢量控制系统,提出采用新型自适应律的改进模型参考自适应系统进行速度辨识,实现了无速度传感器矢量控制.文献[12]选择次级磁链为状态变量,引入虚拟变量法,在全过程条件下对单边LIM进行恒滑差频率矢量控制.文献[13]建立多定子直线感应电动机集总参数模型,重点研究了电机任务交班前后电磁推力不变的控制策略.
本文研究高温超导体[14-15]磁浮系统中直线感应电动机的无速度传感器矢量控制方法.电网中取得的电压经过SVPWM(space sector pulse width modulation)整流控制[16-17]得到稳定的直流母线电压,再控制逆变器,得到作用于电机初级绕组上所需的电流矢量.在电动机运行速度受扰动时,控制器自动调节母线电压;当输入指令速度时,整流器与逆变器同时动作.
1 运动方程
n个单元12槽直线感应电机的初级连在一起,形成长初级的直线感应电动机,图1为初级级联直线感应电动机.
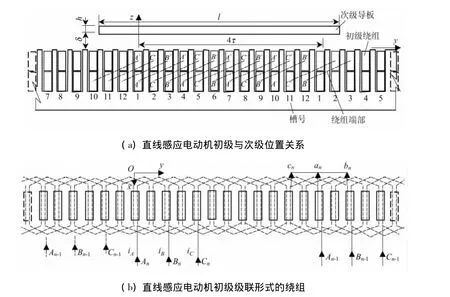
图1 初级级联直线感应电动机Fig.1 The primary cascaded LIM
图1中:
τ为极距;
δ为气隙;
h为次级导板的厚度;
l为次级导板的长度.
直线感应电机在运行过程中,不在n个相同的电机初级绕组上同时加电,需要有检测装置检测或用相应公式推算出次级导板的位置,再根据l与2τ的关系,确定需要同时通电的初级个数.
根据磁动势与电流的关系[18],单相电流在图1所示的某一相绕组中通过时,气隙中不会形成行波磁动势,只有三相电流在时间上相差一定相角、空间上按一定规律布置时,可以在气隙中形成行波磁动势.设平衡的三相电流瞬时值形式为
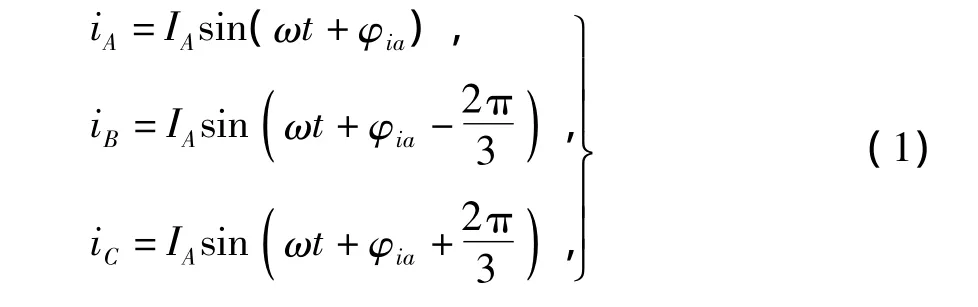
式中:
IA为电源的幅值;
ω为电源角频率;
φia为A相的初始相位角.
图1中的三相电流按式(1)计算.
定义电流矢量[19]为

式中:

iα、iβ分别为复数意义时的实部与虚部,矢量幅值为

根据电流与磁动势的关系[18],磁动势幅值

式中:
N为线圈匝数.
将图1(a)中每相电流产生的磁动势用傅里叶级数展开,取基波分量,得三相磁动势之和的基波分量为

由电磁场基本方程[20]可知,磁场强度数值上与式(4)相同,低频时略去位移电流部分,时变磁场由传导电流产生.
磁场强度在y上的偏导数为电流密度,将磁场强度在y上积分,图1所示的y上在单元电机的范围内正负恰好低消,因此得出积分常数为0.有效气隙为δ时的磁感应强度基波表达式为

式中:
Bzm1为气隙为δ处的行波磁场的幅值.
根据文献[20]可知,在行波磁场的单位波长上电机次级导板受力可表示为

式中:
σ为电机次级导板电导率;
s为电机初级级相对运动的转差率;
vs是电机初级的同步速;
λ为基波行波磁场的波长;

这里,μ为空气中磁导率.
在真空管道高温超导磁浮系统中,将电机初级固定在永磁轨道上,电机次级固定在磁浮车上,一定真空度下磁浮车所受空气的摩擦阻力为

式中:
v为电机初、次级之间的相对运动速度.
真空管道运行的车体所受摩擦力是运行速度、压强、阻塞比等的函数[21-22],当其中两个参数取定值时,具体函数表达式可先用实验方法得出数据,然后再用拟合函数的方法得到.
设车体的总质量为m,其运动方程为

式中:
ay、vy分别为车体的加速度与速度;
vy0为初始速度.
2 控制方法及仿真结果
本文中的恒速控制方法如图2所示.
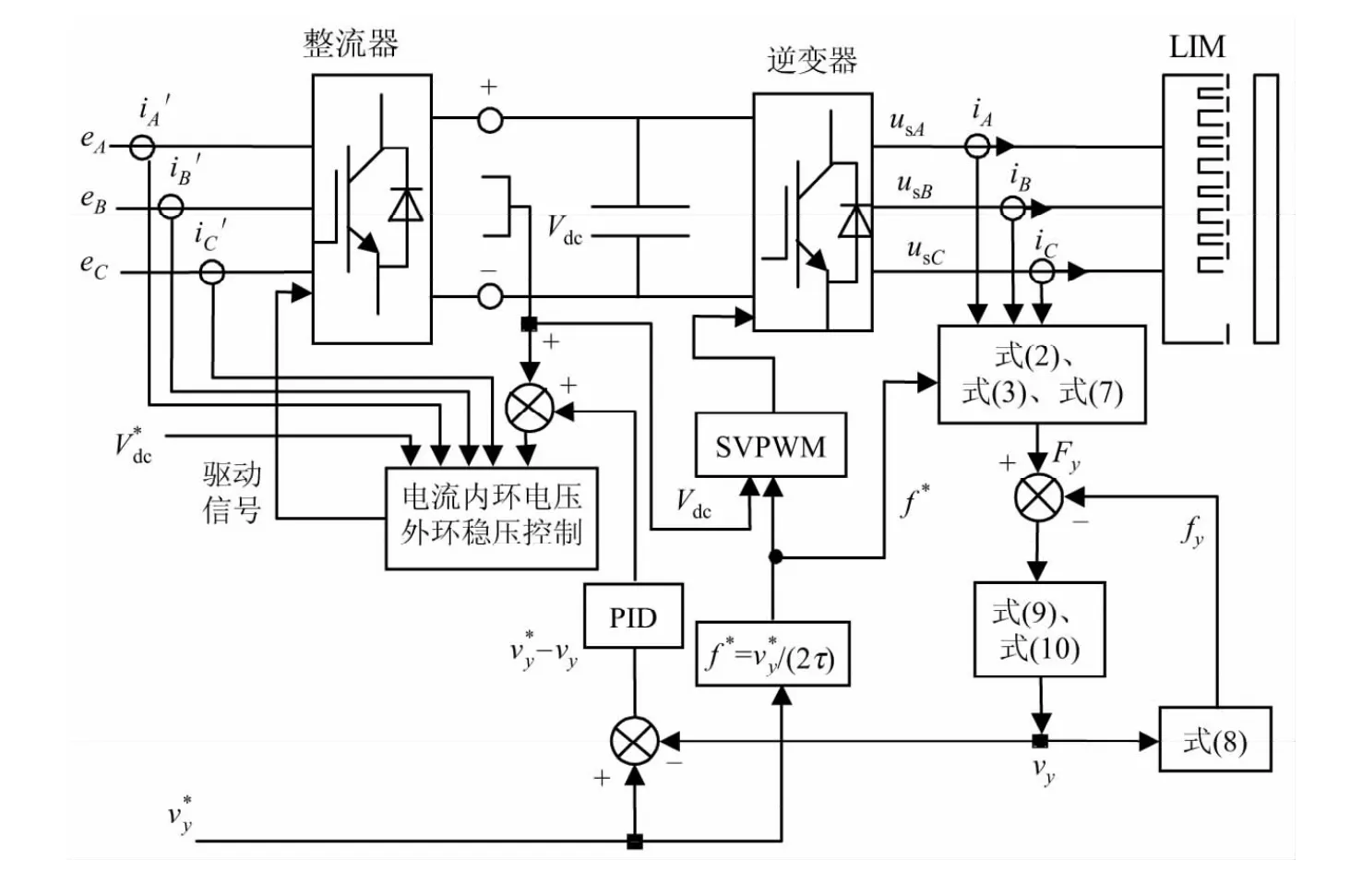
图2 直线感应电动机的无速度传感器矢量控制器结构Fig.2 The block diagram of the speed-sensorless controller for LIM
图2中:
V*
dc为母线电压的输入指令值;
由图2可知,当调节车体的速度时,给定指令速度,由指令速度计算电源需要的频率,根据频率改变逆变器的输出频率.当运行频率在小范围内波动时,控制器自动调节整流器直流侧母线电压,并调节电流矢量幅值,再根据式(9)计算所需的加速度.
仿真采用西南交通大学超导与新能源研究开发中心的真空管道高温超导磁悬浮实验系统,并忽略直线感应电动机的各类端部效应与磁饱和特性.
各仿真参数为:
N=60匝;
δ =0.005 m;
τ =0.04 m;
λ =0.08 m;
h=0.003 m;
l=0.05 m;
m=1.42 kg;
fy=(0.016 35+0.014 6)N;
对各单元电机分段供电,当电机静止时,次级导板所处位置处的那个初级称为第一个单元电机,启动以后逆变器的输出电源线上有按一定算法而产生的三相电压,用光电实时检测器检测车体位置,从而根据要求对应的哪些单元电机应开通.为了减弱单元电机切换时动态端部效应的影响,采用当初级所在第n个初时位置时,关断第n-2个电机与开通第n+1个电机的切换方式,同时有3个初级电机的绕组上在供电.
图3为当电机次级在第一个单元电机位置时,指令速度分别为2、4、6、8 m/s时的启动调速曲线.由图3可知,在相同的参数下当指令速度越大的时候,调速过程越长,超调也越大.
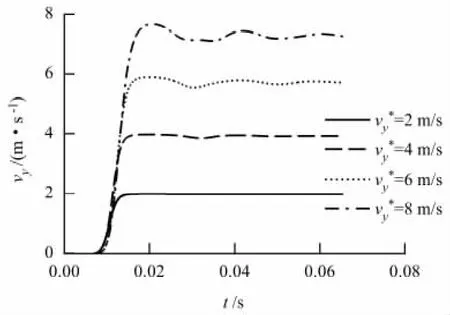
图3 第一个单元电机启动时的速度调节Fig.3 The speed regulation when starting the first LIM
图4为在一个稳定速度运行时突然改变(0.01 s)指令速度时的调速性能(8~12 m/s),从图4中可看出,调节时间小于40 ms.
将受干扰时推力减小或摩擦力增大都归算为摩擦力的增大(合力改变),当指令速度为6 m/s运行时,摩擦力增大2倍时的各参量变化如图5所示.
从图5可看出,在α时刻,摩擦力增加,在β时刻又返回原参数,控制器自动调节内部各运行变量,速度与转差率在小范围内变化,由于整流器母线上稳压控制器的作用,母线电压与三相电流基本没有变化,调节时间小于10 ms.

图4 指令速度改变时的调速性能Fig.4 The performance of speed regulation with the varying reference speed
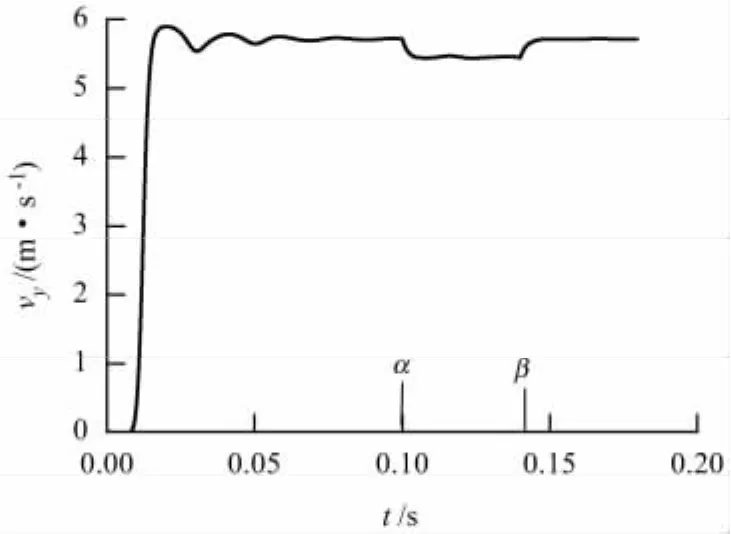
图5 指令速度为6 m/s时的扰动调节过程Fig.5 The regulation process when facing disturbance with a velocity of 6 m/s
3 结论
以真空管道磁浮系统中的直线感应电动机为研究对象,在矢量控制的基础上,设计了一种无速度传感器的矢量控制器,并对其进行软件仿真以验证控制器的合理性.得到以下结果和结论:
(1)在启动运行阶段时,先给定电机的额定同步速度,当启动指令速度与额定同步速度值相差越大时,控制器的调节时间越长,超调量越大.
(2)当运行过程中的运行速度因某一因素而受到扰动时,控制器控制整流器以调节其母线电压.当速度有所降低时,提高母线电压以增大推力.
(3)在稳定运行时,改变其指令速度时,控制器改变逆变器以改变电机的同步速,同时整流器调节母线电压以保证其稳定性能.
[1]YAMAMAMURA S. Theory oflinear induction motors[M].Tokyo:University of Tokyo Press,1978:111-119.
[2]龙遐令.直线感应电动机的理论和电磁设计方法[M].北京:科学出版社,2006:36-41.
[3]KANG G,NAM K.Field-oriented control scheme for linear induction motor with the end effect[J]. IEE Proc.Electr.Power,2005,152(6):1565-1572.
[4]RIK W D,DONALD W N.The universal field oriented controller[J]. IEEE Transactions on Industry Applications,1994,30(1):92-100.
[5]ONUKI T,KAMIYA Y,KURIMOTO Y,et al.A novel block feeding method in the single-sided linear induction motorwith ashortsecondarymember[J]. IEEE Transaction onEnergyConversion, 1999, 14(4):1323-1328.
[6]鲁军勇,马伟明,孙兆龙,等.多段初级直线感应电机静态纵向边端效应研究[J].中国电机工程学报,2009,29(33):95-101.
LU Junyong,MA Weiming,SUN Zhaolong,et al.Research on static longitudinal end effect of linear induction motor with multi-segment primary[J].Proceedings of the CSEE,2009,29(33):95-101.
[7]许金,马伟明,鲁军勇,等.分段供电直线感应电机气隙磁场分布和互感不对称分析[J].中国电机工程学报,2011,31(15):61-68.
XU Jin,MA Weiming,LU Junyong,et al.Analysis of air-gag magnetic field distribution and mutual inductance asymmetry ofsectionally powered linearinduction motor[J].Proceedings of the CSEE,2011,31(15):61-68.
[8]马名中,马伟明,张育兴,等.多定子直线感应电机故障模式下的电流过载特性[J].中国电机工程学报,2013,33(18):96-102.
MA Mingzhong,MA Weiming,ZHANG Yuxing,et al.Phase current overload characteristics of multi-primary linearinduction motors under failure modes[J].Proceedings of the CSEE,2013,33(18):96-102.
[9]LEIDHOLD R, MUTSCHLER P. Speed sensorless controlofa long-stator linearsynchronous motor arranged in multiple segments[J].IEEE Transactions on Industrial Electronics,2007,54(6):3246-3254.
[10]王飞,葛琼璇.基于假设坐标系法的长定子直线同步电机无速度传感器算法[J].电工技术学报,2010,25(2):37-40.
WANG Fei, GE Qiongxuan. Longstatorlinear synchronous motor sensorless control based on hypotheticalreference frame[J]. Transactions of China Electrotechnical Society,2010,25(2):37-40.
[11]王江波,李耀华,严陆光.长初级双边直线电机高性能控制策略[J].电工技术学报,2011,26(5):126-131.
WANG Jiangbo,LI Yaohua,YAN Luguang.High performance control strategy for long promary double sided linear motors[J]. Transactions of China Electrotechnical Society,2011,26(5):126-131.
[12]邓江明,陈特放,唐建湘,等.单边直线感应电机的无速度传感器虚拟控制[J].中国电机工程学报,2012,32(27):53-59.
DENG Jiangming,CHEN Tefang,TANG Jianxiang,et al.Virtual speed sensorless desired control strategy of maglev single-sided linear induction motors[J].Proceedings of the CSEE,2012,32(27):53-59.
[13]马名中,马伟明,王公宝,等.多定子直线感应电机任务交班控制策略[J].电机与控制学报,2012,16(3):1-7.
MA Mingzhong,MA Weiming,WANG Gongbao,et al.Assignment alternating strategy of multiple primaries linear induction motor[J]. Electric Machines and Control,2012,16(3):1-7.
[14]REN Zhongyou,WANG Jiasu,WANG Suyu,et al.Influence of shape and thickness on the levitation force of YBaCuO bulk HTS over a NdFeB guideway[J].Physica C,2002,384:159-162.
[15]YANG Yong,ZHENG Xiaojing.Effect of parameters of a high-temperature superconductor levitation system on the lateral force[J].Supperconductor Science and Technology,2008,21:1-6.
[16]RIGBY B S,HARLEY R G.An improved control scheme for a series-capacitive reactance compensator based on a voltage-source inverter[J]. IEEE Transactions on Industry Applications,1998,34(2):355-363.
[17]SCHAUDER C, MEHTA H. Vector analysis and control of advanced static VAR compensators[J].IEE Proceedings C,1993,140(4):299-306.
[18]张广溢,郭前岗.电机学[M].重庆:重庆大学出版社,2002:69-173.
[19]王久和.电压型PWM整流器的线性控制[M].北京:机械工业出版社,2008:8-36.
[20]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000:25-50.
[21]CHEN Xuyong,ZHAO Lifeng,MA Jiaqing,et al.Aerodynamic simulation of evacuated tube maglev trains with different streamlined designs[J].Journal of Modern Transportation,2012,20(2):115-120.
[22]MA Jiaqing,ZHOU Dajing,ZHAO Lifeng,et al.The approach to calculate the aerodynamic drag of maglev train in the evacuated tube[J].Journey of Modern Transportation,2013,21(3):200-208.
