气流式水平姿态传感器热敏丝结构的研究
2015-05-21杨其锐朴林华赵京京谭家成
杨其锐,朴林华,赵京京,秦 艺,谭家成
(北京信息科技大学传感技术研究中心,北京100192)
0 引言
1 结构原理和物理模型
气流式水平姿态传感器敏感元件的结构和检测电桥如图1所示。敏感元件是由圆柱形的密闭腔体和热电阻丝组成。热电阻丝使密闭腔内气体产生自然对流,可以敏感倾角的作用。当传感器所在平面相对水平面倾斜时,热电阻丝的阻值发生变化,引起电流改变,电桥失去平衡,输出与倾角相对应的电压。热敏电阻丝由对温度敏感,在空气中不易氧化的铂丝制作。
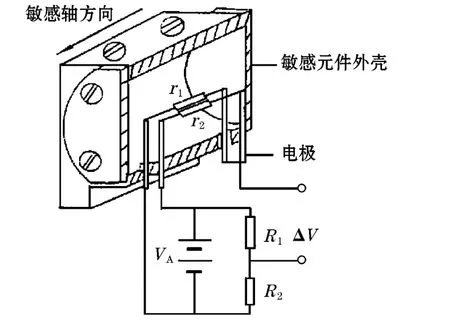
图1 敏感元件的结构
气流式水平姿态传感器的密闭腔体是轴对称的,热敏电阻丝的直径远小于圆柱形的半径,为了便于用ANSYS CFD进行计算,将敏感元件简化为二维结构,热敏电阻丝和热源都简化为点。如图2所示,重力加速度的加载在Y轴上,密闭腔体的半径r设为10 mm,四壁保持散热,环境温度T0为常温20℃。热电阻丝的阻值相同,二丝结构的热电阻丝r1、r2关于原点对称分布,间距d=8.8 mm,如图2(a)所示,而三丝结构的热源q置于坐标轴的原点上,如图2(b)所示,两热敏电阻r1、r2关于热源q对称分布,距离热源的间距d=8.8 mm。
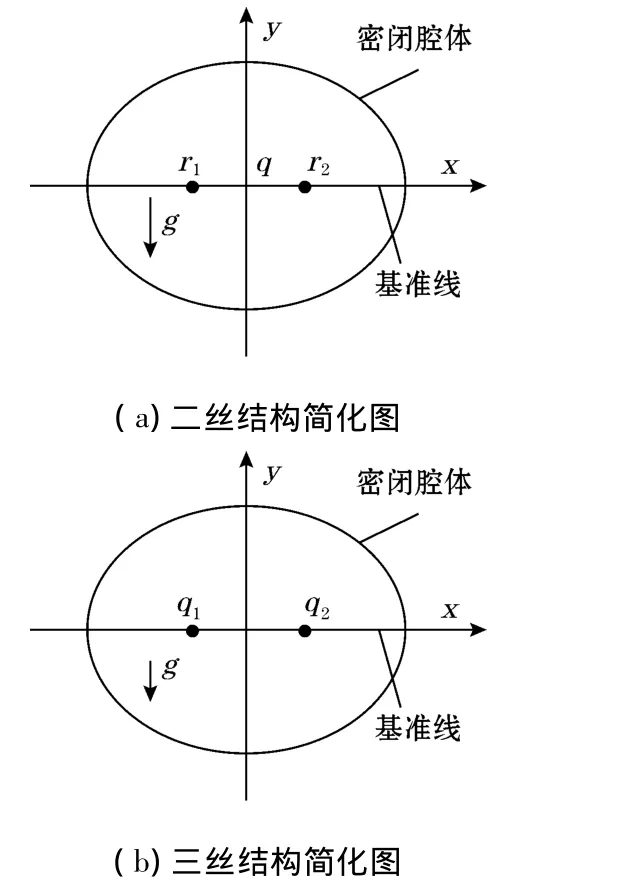
图2 敏感元件的简化图
2 有限元法求解
ANSYS中的CFD用于计算单相粘性流体的二维和三维流动、压力和温度分布,ANSYS求解通常包括建模、划分网格、施加载荷和计算4个步骤:
(1)建模:选择ANSYS软件中FLOTRAN CFD分析功能,选择FLUID141单元。用一个半径0.01 m圆形代表密闭腔体。
(2)划分网格:采用手动设置线段划分数目的方式定义圆形的每条线段划为80等份,将整个面划为6400个单元。
(3)施加载荷:设置外边界节点沿x、y轴向速度为零,保持常温293 K,分别设置三丝结构和二丝结构敏感元件内热源的温度(需整体倾斜一定角度),腔体四壁保持散热。
(4)计算:确定分析类型为热分析;设置全局迭代数为200;设置流体的密度、粘性系数、导热系数和比热为空气(AIR SI),由于自然对流的驱动力来源于由温度变化而引起的密度变化,所以要激活变密度选项;设置沿y轴方向的重力加速度;采用三对角矩阵法(TDMA)求解器,读入结果并以图形方式显示气流速度图。
3 计算结果与讨论
气流式水平姿态传感器的灵敏度应定义为ΔV/Δθ,ΔV是传感器改变Δθ时输出的信号电压变化,它决定于倾角变化前后气流速度场在敏丝处的温度差和测温系统的电压转换系数。如图1所示的惠斯登电桥可得:

式中:α为T0时铂丝的温度系数;R0为铂丝T0的阻值;T1、T2为热敏电阻丝的温度。
没多久,由于公司效益不好,我主动辞职了,很久没找到合适的新工作。有天突然下身剧痛流血,竟然是流产了,可我由于忙着找工作还不知道自己怀孕了。几个月后又怀上,可很快又流产。
所以传感器的灵敏度可定义为:

在温度变化不大的情况,VAαR0/2是常数,故灵敏度是决定于倾角造成的温度差。可用变化前的温度场在θ与θ+Δθ两处的温度差来确定倾角灵敏度。
当气体的动力学粘度、热传导特性一定时,热敏电阻丝的温度变化是由电阻周围的气体速度变化引起的,速度越大带走的热量越多,热敏电阻的温度变化越大,流过电阻丝的电流也不同,从而引起电阻丝两端的电压也产生相应的变化[3]。为计算简单,在理论讨论灵敏度时,可用Δv/Δθ定义,表示为速度灵敏度,其中Δv是两热敏丝处的气流速度差的变化量,这样我们可直接计算速度灵敏度来讨论传感器的灵敏度。
气流式水平姿态传感器敏感倾角的敏感程度可以以不同倾斜角θ的自然对流速度场来计算,通过对应的速度变化量来求得。计算二丝结构和三丝结构的条件是热源温度 Ts为100℃,环境温度T0为20℃,图3是计算二丝和三丝结构的倾角与速度差的关系图。从图中可以看出三丝结构在θ为0~30°的测量范围内有较好的线性度,此时运用Matlab数据拟合求出斜率为0.383是1×10-3m/(s·°),大于30°后速度差变化量反而减小,线性度变差;二丝结构在θ为0~20°的测量范围内有很好的线性度,此时运用Matlab数据拟合求出斜率为0.248 7×10-3m/(s·°),大于20℃后线性度变差。可以得出三丝结构的测量范围为0~30°,二丝结构的测量范围要比三丝结构的小10°左右。且三丝结构的斜率要大于二丝结构的斜率,即三丝结构对倾角的速度灵敏度Δv/Δθ要比二丝结构的灵敏度大。
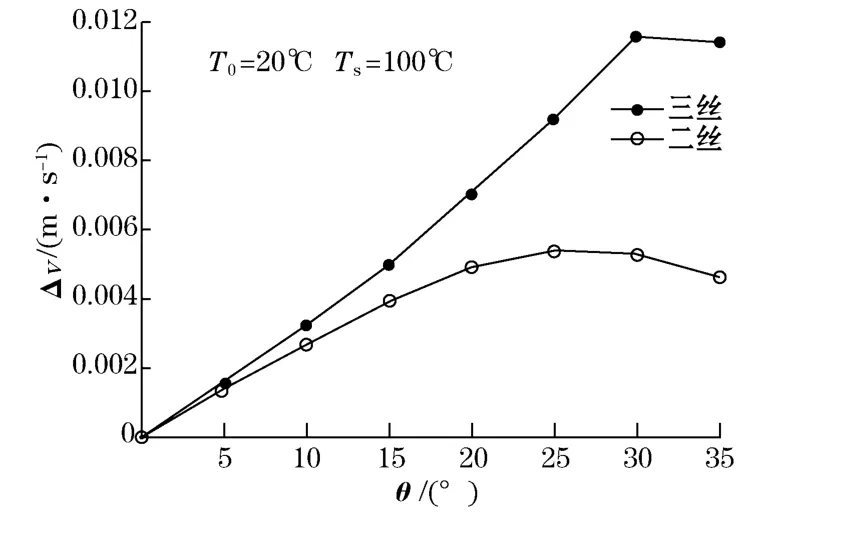
图3 灵敏度变化曲线
图4为二丝结构和三丝结构在不同热源温度时,传感器倾角θ为20°的热敏元件的速度差值变化量的曲线。从图4中可以看出,在热源温度低于124℃时,三丝结构的速度差变化量要大于二丝结构的速度差变化量;高于124℃时,三丝结构的速度差变化量要小于二丝结构的速度差变化量,且随着热源温度的增加,这种变化量的差值越来越大。比较明显的是二丝结构的变化曲线比较陡峭,而三丝结构的变化曲线趋于平稳,近乎直线。可知,灵敏度同时随着热源温度的变化而变化,总体上二丝结构的气流式水平姿态传感器对温度的敏感性要好于三丝结构的气流式水平姿态传感器,三丝结构速度差随温度变化的变化率为0.89×10-5m/(s·℃),二丝结构速度差随温度变化的变化率为7.5×10-5m/(s·℃),外界环境温度的变化和热源温度的变化就更容易引起传感器的不稳定,所以三丝结构的水平姿态传感器的温度性能要好于二丝结构。
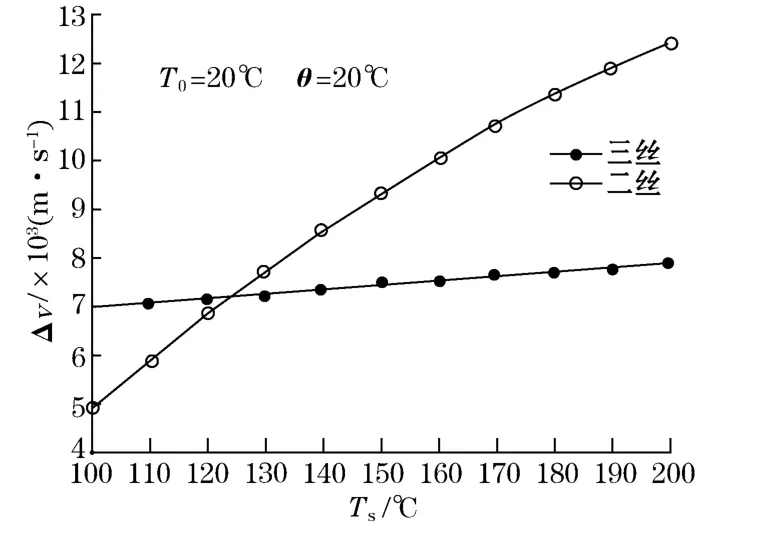
图4 热源温度不同时的变化曲线
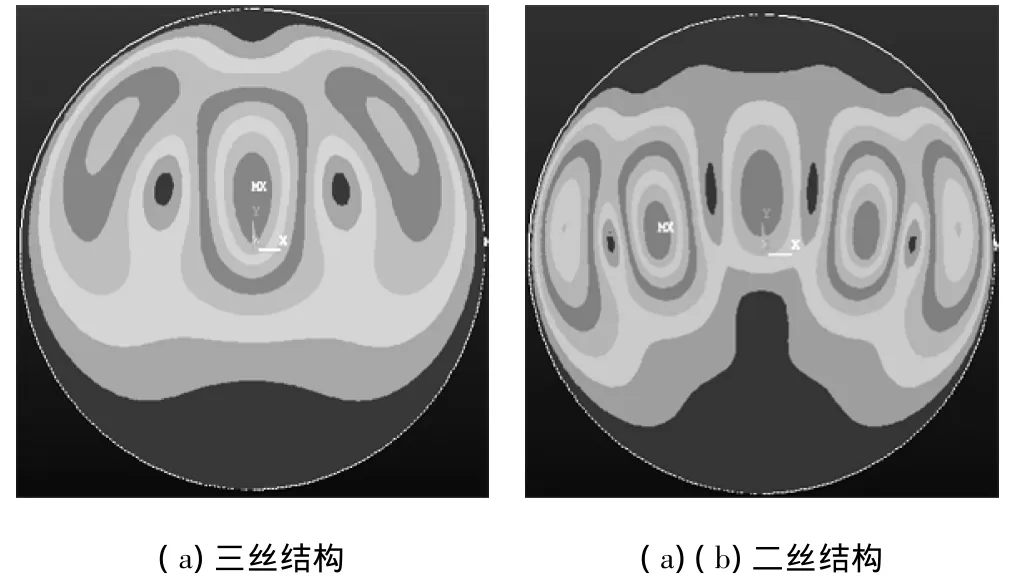
图5 T0=20℃、Ts=100℃、θ=0°时的速度云图
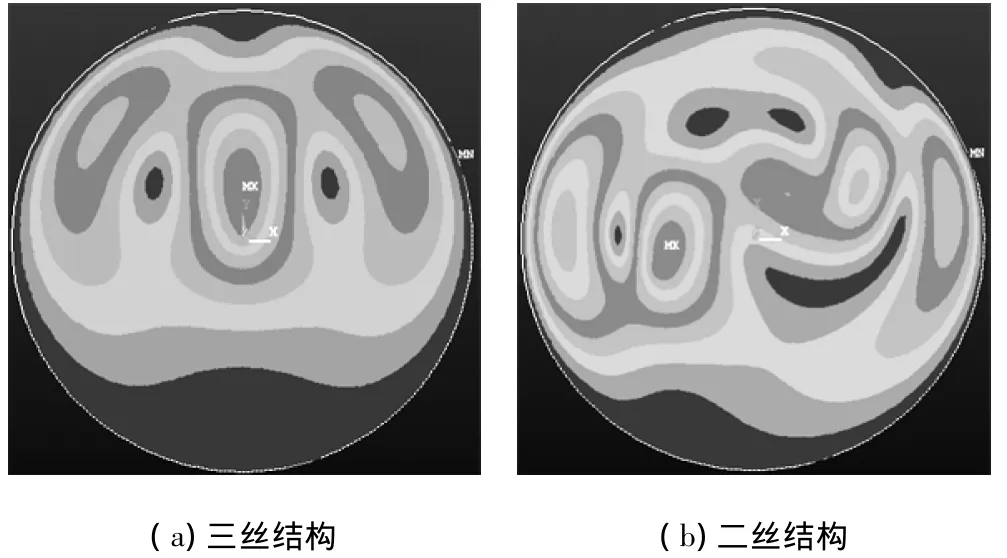
图6 T0=20℃、Ts=100℃、θ=20°时的速度云图
从图5(a)和图6(a)中可以看出,三丝结构的速度场始终是左右对称分布的,改变热源的温度,热源的相对位置是在坐标轴原点,重力加速度也竖直向下的。而二丝结构的不同,倾斜一定角度后两热源的相对位置发生了改变,所以二丝结构的速度场不是对称分布的,有显著的差异,如图5(b)和图6(b)所示。在热源一定,改变倾角的情况下,三丝结构的速度场的等速度云图没有发生改变,两热敏电阻丝的位置发生了改变,改变的方向相反,一个趋向速度值高的等速度区域运动,另一个趋向速度值低的等速度区域运动,且相对速度变化量差不多,跟倾角有一定的线性关系;而二丝结构的速度场不是对称分布,在一定倾角范围内,两热电阻丝的相对速度变化量跟倾角有较好的线性关系,但随着倾角的增大,速度场的变化越大。在倾角一定,改变热源的温度时,三丝结构的速度场分布还是对称,随着热源温度的增加,速度的等值区域大小相对有变化,两处热敏电阻的相对变化较小,而二丝结构的热源要多,随着热源温度增加,速度场变化越剧烈,且不是对称分布,两处的速度差相对变化量就越大。所以,三丝结构的传感器在敏感倾角的灵敏度和温度方面要优于二丝结构的性能。
4 结论
本文采用有限元方法,分别计算了空间位置一样的二丝结构和三丝结构的气流式水平姿态传感器在不同倾角和不同热源温度下的敏感元件内的速度场,分析结果表明:
(1)在T0为20℃,Ts为100℃时,三丝结构气流式水平姿态传感器对倾角变化的速度灵敏度 Δv/Δθ为0.383 1×10-3m/(s·°),二丝结构的为 0.2487 × 10-3m/(s·°)。三丝结构的气流式水平姿态传感器对倾角变化的速度灵敏度要优于二丝结构的。
(2)三丝结构的测量范围为0~30°,二丝结构的测量范围为0~20°。
(3)在T0为20℃,θ为20°时,三丝结构的气流式水平姿态传感器速度差变化量随热源温度的变化率为0.89×10-5m/(s·℃),二丝结构的变化率为7.5×10-5m/(s·℃),三丝结构的气流式水平姿态传感器温度性能的稳定性要优于二丝结构的。
[1]朴林华,李言杰,李白华.气流式水平姿态传感器的敏感机理.东南大学学报(自然科学版),2009(S1):244-247.
[2]朴林华,丁霞,李言杰,等.三丝结构气流式水平姿态传感器的研究.压电与声光,2009(04):504-506.
[3]宋佳,朴林华,刘玉洁,等.温度对微机械全方位姿态传感器灵敏度的影响.压电与声光,2010(3):368-371.
[4]纪明明,朴林华,李白华.气流式水平姿态传感器的三维建模及计算.北京信息科技大学学报(自然科学版),2010(2):41-44.
[5]林建华,朴林华,张福学.气流式微机械倾角敏感元件的建模及流场分析.北京信息科技大学学报(自然科学版),2013(6):59-62.