基于模糊增强的安全带佩戴识别方法
2015-05-15李万臣张晋
李万臣,张晋
哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨 150001
基于模糊增强的安全带佩戴识别方法
李万臣,张晋
哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨 150001
为了弥补目前安全带佩戴提示系统的不足,提高驾驶员安全带佩戴率,提出一种基于模糊增强的安全带识别方法。该方法首先对采集到的驾驶员图像进行光补偿处理,采用自定义的Canny算子进行边缘检测,再使用Hough变换对处理过的图像进行直线检测和初步判断,对于没有检测到安全带的图像进行模糊增强,采用最大类间方差法选择最佳阈值进行图像分割得到二值化图,再进行直线检测并得到最后结论。实验证明,该方法有效地完成对驾驶员安全带佩戴情况的识别,具有较高的准确率。
安全带识别;边缘检测;Hough变换;直线检测;模糊增强
安全带是公认的最有效、最直接的车内被动保护设施,通过佩戴安全带可以有效降低交通事故的伤亡率[1]。作为降低交通事故中死伤率和保障司机安全驾驶的一项重要举措,交管部门严格要求驾驶员在行车过程中佩戴安全带。因此,对安全带佩戴提示系统及识别方法的研究,有着重要的意义。目前,国内外主要通过安装传感器的方法对安全带佩戴进行检测识别,如在卡座中安装传感器进行检测[2],系统判定只有当安全带卡扣插入安全带卡座并且锁定的情况才是安全带正常佩戴的情况。但是驾驶员经常有假佩戴[3]的行为出现,比如先将安全带卡扣扣好,然后再坐在座椅上。文献[4]通过在坐垫和靠背上安装压力传感器来进行辅助检测,但这种方法依然不能有效地提高安全带佩戴率。通过道路监控的方式采集的驾驶员图像,对安全带佩戴进行检测,只能够记录数据,无法做到及时提醒和警告驾驶员的作用。文献[5]采用一种基于灰度积分投影的方法对安全带进行检测识别。但是该方法需要具有反光性能的安全带,不具有普遍适用性。针对现有安全带识别方法的不足,本文提出一种基于模糊增强的安全带识别方法。该方法设计了一种安全带检测模型,通过对图像进行模糊增强,增强边缘点两侧像素灰度的对比度[6],然后利用直线检测及判别模块对图像进行检测,达到安全带识别的目的。该方法能有效准确地识别出驾驶员是否佩戴安全带,具有较强的实用性。
1 安全带佩戴识别过程
驾驶员的图像信息通过在车内安装摄像机采集得到,首先进行图像预处理,包括光补偿和平滑去噪。然后对经过预处理的图像进行边缘检测和直线检测,初步判断是否有佩戴安全带。对于判断没有佩戴安全带的图像,先对经过预处理的图像进行模糊增强,再采用最大类间方差法选择最佳阈值进行图像分割得到二值化图,然后进行直线检测并得出最终结论。安全带识别算法流程如图1所示。

图1 安全带识别算法流程
1.1 图像预处理
1.1.1 光照补偿
由于车辆使用环境较为复杂,尤其是车辆内部光线环境变化很大,文中选择代表大多数情况的普通光照条件下的驾驶员驾驶图像进行处理,而完全黑暗或者阳光曝晒的极端情况并不考虑。利用照度仪经过多天实验测得车内光照强度范围在100~20 000 lx。本文采用自适应非线性变换修正法[7]对像素的亮度值进行处理。具体过程如下:
1)对较亮和较暗区域的修正。
设输入图像像素的亮度值为g(x,y),输入图像像素总数是N,灰度级是L,文中取L=256,第i级灰度的值是ri,灰度级ri出现的频数为ni,pr(ri)为第i个灰度级出现的概率:

当si<5%,si+1>5%时,若mi>100且g(x,y)灰度值靠近0,令H=g(x,y);即从低到高对整幅图像像素的亮度值进行排列,若有足够多的像素排在前5%(例如满足条件的像素个数大于50,本文取整个图像像素个数的3%),就将这些像素的最大亮度值改为H。
当si<95%,si+1>95%时,若mi>100且g(x,y)灰度值靠近255,则令L=g(x,y);即从高到低对整幅图像像素的亮度值进行排列,若有足够多的像素排在前5%(例如大于50,本文取整个图像像素个数的3%),就将这些像素的最小亮度值改为L。
2)对中间灰度区域的修正。
根据人的视觉感应模型,为了获得柔和且层次清晰的变换后图像,要求人视觉的视敏响应模拟曲线和图像变换后的直方图是相匹配的。根据文献[8]可知,人视觉感受的亮度强弱与眼睛入射光强(照度)是对数函数的关系。变换关系如下:

式中:f(x,y)为经过变换后的图像像素亮度值;m、n表示图像变换前的最大和最小灰度值;GH、GL是图像变换后的最大和最小灰度值。
自适应非线性变换函数f(x,y)表示如下:

1.1.2 滤波去噪及感兴趣区域截取
图像经过光线补偿后,仍然会存在一定的噪声,会造成后续处理工作准确性的降低。为了提高检测准确度,本文利用中值滤波对于点状噪声和干扰脉冲具有良好的抑制作用的特点进行平滑去噪。通过固定角度的摄像机拍摄的驾驶员图像即使每个个体身材不同,但是对检测结果有重要影响的驾驶员躯干部分还是会在相对固定的位置,为了进一步提高识别准确率,本文选择截取驾驶员颈部以下的躯干部分作为感兴趣区域进行安全带检测。
1.2 边缘检测
在各种经典边缘检测算子中,Canny算法不仅具有最全面的边缘信息[9]而且对于光照改变时依然鲁棒。Canny算子是根据检测边缘的可靠性和有效性,研究最优化检测边缘的特性,并推导出数学表达式。Canny算子是从满足边缘检测效果的3个准则出发推导得出的,3个准则分别是:信噪比高、定位性能强、边缘响应单一。
图2是满足上述3个准则的边缘检测算法流程图。从图2可以看出,输入图像首先要进行高低平滑滤波,抑制图像噪声。高斯函数为

式中:x、y为图像中的二维参数,σ控制平滑程度,σ越小,边缘定位精度越高,图像信噪比越小;σ越大,边缘定位精度越低,对噪声能够极大抑制。σ一般取1.0~2.0。
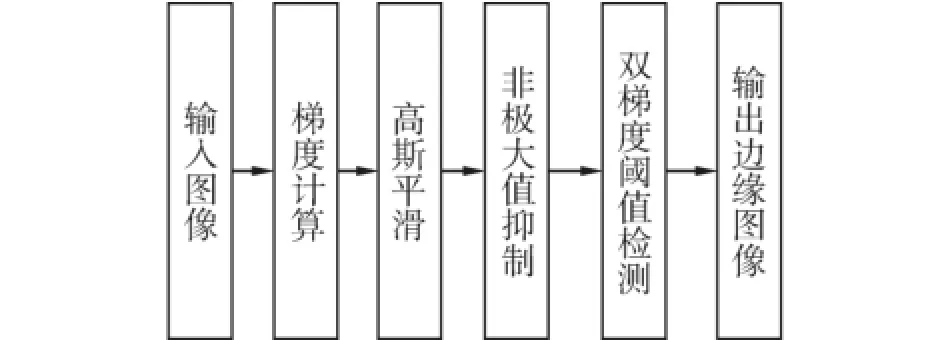
图2 Canny算子边缘检测流程

图3 Canny边缘检测效果图
其次,Canny算子通过计算像素点的梯度得到边缘点,同时计算出每个像素点的梯度幅度和梯度方向。再用非极大值抑制法对图像的屋脊进行细化,保留局部幅值变化最大的边缘点。具体方法是:考虑像素点的3×3邻域,将中心像素点的梯度幅值与其梯度方向所在区域相同的2个像素点的梯度幅值相比较,若中心像素点的幅值小于相邻像素点的幅值,则中心像素点为非边缘点;反之,中心像素点为候选边缘点。
最后使用双梯度阈值法[10]对边缘点进行连接操作。具体方法是:设定2个门限值,高阈值T1和低阈值T2。对图像中每一个像素点进行检测,梯度幅值大于幅值T1的像素点被认为是边缘点,幅值小于阈值T2的像素点则被认为是非边缘点,于两阈值之间的像素点视为弱边缘点。即分别用高阈值T1和低阈值T2对图像进行检测,将梯度幅值小于T1的像素灰度设为0得到边缘图像1,把梯度幅值小于T2的像素灰度设为0得到边缘图像2。选取阈值较大的图像1噪声少,但丢失了部分真实边缘,而选取阈值较小的图像2,保留了大部分的边缘信息,但存在伪边缘。因此可以以边缘图像1为基础,再以边缘图像2进行修正从而得到最终的边缘图像。图3即为使用Canny算子进行边缘检测得到的效果图。其中,左侧(a)组的5张图像为原彩色图像,右侧(b)组的5张图像为对应的边缘检测后的图像。
1.3 基于模糊增强的安全带直线检测
驾驶员的衣着颜色会影响边缘检测效果及后续判断的结果,因为会有驾驶员衣物的灰度值与安全带灰度值接近的情况,这时通过对图像进行模糊增强可以有效增大区域对比度,提高检测准确性。
1.3.1 基于GFO算子的模糊增强
模糊集理论在感知、分析判断及辨识人类的各种行为时是一个有效的工具,而一幅灰度图像边缘检测的效果随着图片所含的灰度级的层次的减少而变好,基于上述原因,Pal.King等[11]提出了一种图像边缘检测模糊算法。但由于该算法的模糊隶属函数采用幂函数形式,运算量大,并且为了解决逆变换无解的问题会以牺牲图像中部分低灰度值的灰度信息为代价。本文的隶属函数采用升半梯形分布,并利用广义模糊算子[12]将广义模糊集变换为普通的模糊集合,在模糊空间做对比度增强处理,提高了检测速度和质量。
论域上U广义模糊集合A表征为

式中:μA(x)∈[-1,1]称为U上A的广义隶属函数。普通模糊集合经过扩充成为广义模糊集合,即将普通模糊集合的隶属函数从μA(x)∈[0,1]扩充至广义模糊集合的μA(x)∈[-1,1]。
定义一个广义模糊算子GFO,广义模糊集A经其作用可产生普通模糊集A′,即A′=GFO(A),本文GFO定义如下:
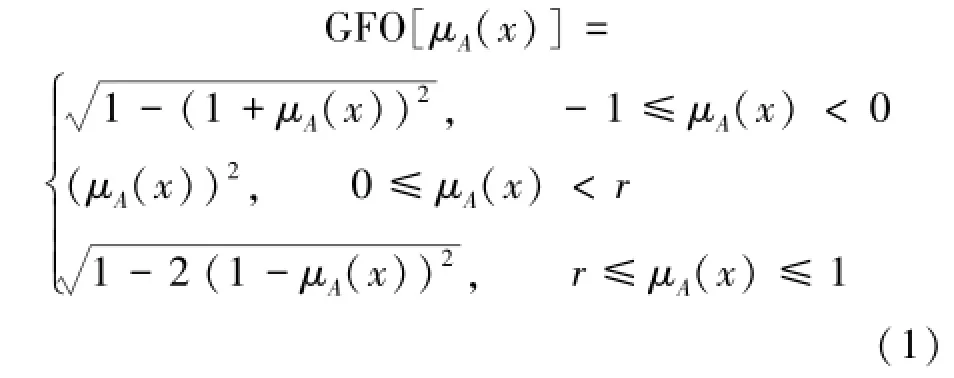
根据分段函数在r处的连续性可得r≈0.295 6。GFO算子的作用是降低广义模糊集A的模糊度,即通过增加-1≤μA(x)<0和r≤μA(x)≤1区域中μA(x)的值和降低0≤μA(x)<r中μA(x)的值来增强区域间对比度。采用Pal算法进行图像增强,需要迭代运算(一般需要2~5次迭代)来达到较好的增强效果,算法运算时间长。而式(1)引入开放运算,进一步强化增强效果,一般只需一次迭代即可得到较好效果。
把图像X看作是一个广义的模糊集合,表示为矩阵:

本文通过一种升半梯形分布函数来求Pij,即

式中V为可调参数,选择范围为

式中xmax和xmin分别为图像的最大和最小灰度值,式(2)是一个简单的线性函数,运算速度快。
基于GFO算子的模糊增强算法步骤如下:
1)通过式(2)将图像X从空间域的灰度值X={xij}映射到与之对应的广义隶属度P={Pij}。
2)通过定义的GFO算子对广义隶属度进行非线性变换,增强区域之间的对比度。
3)利用式(2)的反函数进行对普通隶属度P′的逆变换,得到经过了模糊增强的图像X′,X′中像素点的灰度x′ij为

1.3.2 图像二值化
图像二值化的主要目的是保留图像的有用信息。最大类间方差法[13]具有计算简单、自适应强的特点,因而成为使用最多的图像阈值自动选取方法之一,被广泛应用在图像二值化处理中。最大类间方差法是1979年由日本学者大津提出的,又称大津法,简称OTSU。其主要思想是用阈值T把图像的灰度值集合分为2类,然后计算2个类别的平均值方差(类间方差)和这2个类的方差(类内方差)的比,比值最大时候的阈值T即为所求阈值。
假设图像有L个灰度级,阈值为T,根据灰度值在T以下或者在T以上将像素分为2类,设为类1和类2。类1中的像素数量为n1(T),灰度值的均值为v1(T),方差为σ21(T);类2中的像素数量为n2(T),灰度的均值为v2(T),方差为σ22(T)。全体像素的平均值为VT,则类内方差为

类间方差为

1.3.3 直线检测及判别
在众多的直线检测算法中,Hough变换因其算法稳定性高、抗噪性能好的特点而被广泛使用,但存在计算量和储存空间太大的缺点。本文采用改进的直线检测算法[14-15],即设定一距离条件以及累加器单元阈值,在随机Hough变换选取点对时需先满足距离条件,然后才可计算参数值,进而得到参数空间。这样有效地解决了上述问题,提高了图像直线特征提取的运算速度。距离的获得公式如下:

算法步骤如下:
1)扫描图像空间,得到边缘点集D,设定参数空间Q为空,迭代步骤数k=0。
2)随机从D中选取点对d1(x1,y1)和d2(x2,y2),d1(x1,y1)≠d2(x2,y2),如果d≤dmax,则继续下一步,否则重新选取d1(x1,y1)和d2(x2,y2)。
3)将点对代入得到参数空间点q=(a1,a2)。
4)在参数空间中搜索qc,若则认为存在这样的qc,转到步骤6),否则转到步骤5)。
5)把q插入到参数空间中,转到步骤7)。
6)相应的累加器单元计数加1,并且检测该计数是否大于设定的阈值,如果是,转到步骤8),否则转到步骤7)。
7)k=k+1,如果k>kmax,算法结束,否则转到步骤2)。
8)qc为所检测到的直线参数,将D中相应的点清除后对参数空间进行初始化,转到步骤2)。
根据安全带几何特征的先验知识,本文基于Hough直线检测提出了一种安全带佩戴检测模型。规定了所检测到的直线的斜率范围为-85°~-30°,规定了所检测到的2条直线的斜率差绝对值应小于30°。直线检测及判别模块的流程图如图4所示。

图4 直线检测及判别模块一流程
2个直线检测及判别模块在输出部分略有不同,需要模块2输出没系安全带的时候将直接转入模糊增强部分。
2 实验结果与分析
在主频2.0 GHz,内存2 GB,Windows XP操作系统的计算机上进行实验,软件环境采用MATLAB7.0图像处理工具箱。按照上述方法对10名驾驶员在不同时刻的不同光照条件下共150张采集图片进行实验,选取的各组图片驾驶员衣着颜色和纹理不同,并有是否佩戴安全带的区别。实验所得识别正确的图像个数为124张,识别准确率为82.7%。佩戴安全带和不佩戴安全带的驾驶员识别结果如表1、2所示。

表1 佩戴安全带的驾驶员识别结果统计
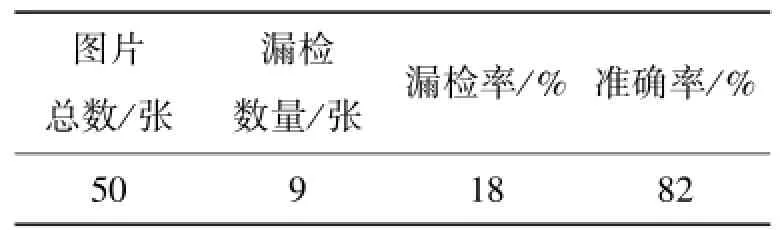
表2 没佩戴安全带的驾驶员识别结果统计
部分驾驶员原图像及安全带识别结果如图5、6所示。

图5 驾驶员佩戴安全带的识别结果

图6 驾驶员没佩戴安全带的识别结果
为了验证本文算法可以排除条形图案的衣服对实验结果的干扰,也对条形图案的衣服做了实验,实验结果如图7所示。
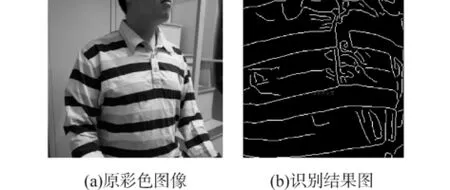
图7 条形图案的衣服识别结果
由实验结果可知,除非驾驶员衣物灰度与安全带的灰度极为接近,否则驾驶员衣物颜色不会对检测结果造成影响。但驾驶员衣着或饰物对安全带的遮挡会造成图像中安全带出现变形、不连续,甚至断点的情况,从而会造成识别错误,这是影响本文算法识别准确率的主要原因。
实验结果表明,通过本文算法检测驾驶员是否佩戴安全带的准确率较高,能够适应不同的驾驶人及不同的服饰条件。相较于文献[5]的方法,本算法不要求装备反光性能的安全带,更具有普遍适用性。
3 结束语
针对目前安全带佩戴提示系统的不足,采用光照补偿和平滑滤波对采集到的图像进行预处理,通过Canny边缘检测和Hough直线检测,初步判断是否有佩戴安全带。对于判断没有佩戴安全带的情况,则对预处理过的图像进行图像增强,再采用最大类间方差法进行图像分割得到二值化图,最后进行直线检测得到安全带佩戴识别结果。由实验可知,驾驶员衣物对安全带的遮挡及安全带的变形会造成识别错误,考虑使用颜色模型和带状区域检测相结合的方法,进一步提高识别准确率,是未来工作努力解决的方向。
[1]National Highway Traffic Safety Adm inistration.Fifth/Sixth report to congress:effectiveness of occupant protection sys-tems and their use[R].Washington DC:U.S.Department of Transportation;National Highway Traffic Safety Adminis-tration,2001.
[2]OKADA Shoji.Seat belt warning device:United States, US6239695B1[P].2001-05-09.
[3]俞学群,武阳丰.机动车安全带作用、使用现状及干预策略[J].中国预防医学杂志,2008(5):440-441.
[4]BECKER G,MOUSEL T,SCHOCKMEL P.TOR(total oc-cupant recognition)system[C]//Proceedings of 17th In-ternational Technical Conference on the Enhance Safety of Vehicles.Amsterdam,Netherlands,2001:4-10.
[5]葛如海,胡满江,符凯.基于灰度积分投影的安全带佩戴识别方法[J].汽车工程,2012,34(9):787-790.
[6]李弼程,彭天强,彭波.智能图像处理技术[M].北京:电子工业出版社,2004:246-298.
[7]梁晓辉,游志胜.自适应的彩色图像光照补偿新方法研究[J].光电工程,2006,33(2):94-97.
[8]WERBLIN F S,COPENHAGEN D R.Control of retinal sensitivity[J].Journal of General Physiology,1974,63(1):62-87.
[9]CANNY JA.Computational approach to edge detection[J].IEEE Trans on PAMI,1986,8(6):679-698.
[10]王植,贺赛先.一种基于Canny理论的自适应边缘检测方法[J].中国图象图形学报,2004,9(8):957-962.
[11]PALSK,KINGR A.Image enhancementusing smoothing with fuzzy sets[J].IEEE Trans on System,Man and Cy-bernetics,1981,11(7):494-501.
[12]王辉,张基宏.图像边界检测的区域对比度模糊增强算法[J].电子学报,2000,28(1):45-47.
[13]李宏,张冬生,林义刚,等.基Otsu理论的灰度图像分割算法研究和改进[J].科学技术与工程,2010,22(10):5437-5440.
[14]陈志良.序列图像中的直线特征提取与匹配[D].南昌:南昌航空大学,2011:27-29.
[15]岳健,项学智.一种改进的Hough圆检测算法[J].应用科技,2006,33(6):74-76.
A method of recognizing seat-belt wearing based on fuzzy enhancement
LIWanchen,ZHANG Jin
College of Information and Communication Engineering,Harbin Engineering University,Harbin 150001,China
To overcome the insufficency of existing warning systems for seat-beltwearing,and to further increase the seat-beltwearing rate,a new method for recognizing whether a seat-belt isworn or not is proposed based on fuzzy enhancement.In thismethod,firstly,the collected images of the driver are processed by light compensation.After using the customized Canny operator for edge detection,the straight-line detecting based on Hough transform and the preliminary judgment are proceeded.By processing the images in which the seat belt hasn’t been detected,a picture with fuzzy enhancement is obtained,then the Otsu method is used to select the optimal threshold for image segmentation,deriving the binary images.And then the straight-line detection is proceeded and thus the final con-clusion is reached.The test results show that the method proposed can effectively recognize the seat-belt wearing state with high accuracy.
seat-belt recognition;edge detection;Hough transform;straight-line detection;fuzzy enhancement
TP391.4
:A
:1009-671X(2015)01-22-06
10.3969/j.issn.1009-671X.201312001
http://www.cnki.net/kcms/detail/23.1191.U.20150112.1530.004.htm l
2013-12-02.
日期:2015-01-12.
李万臣(1963-),男,教授;张晋(1988-),男,硕士研究生.
李万臣:E-mail:lwchen@hrbeu.edu.cn.