基于电容微位移传感器的大载荷微动台的研制
2015-05-15陈琦
陈琦
中国科学院长春光学精密机械与物理研究所,吉林长春 130033
基于电容微位移传感器的大载荷微动台的研制
陈琦
中国科学院长春光学精密机械与物理研究所,吉林长春 130033
在超精密光学工程等领域,为了满足大质量部件的超精密进给定位应用需求,设计并研制了一种大载荷的纳米定位平台。该纳米微动承载台采用双闭式气浮导轨,由压电陶瓷致动器结合柔性铰链提供驱动,通过电容微位移传感器实时监测终端承载台位移并实现闭环反馈控制,有效地克服了压电陶瓷致动器的非线性影响因素,并消除了系统由于形变或应力释放等因素产生的不确定性干扰。在传统纯柔性铰链传动机构上增设了双导轨气浮承载台,显著增强了系统的载荷能力,气浮均化效应也提高了系统进给运行的直线性,双压电推拉式驱动方式提高了系统结构刚度,电容微位移传感器取代双频激光干涉仪或电阻式位移传感器的应用,降低了系统运行尤其是测量系统对环境条件苛刻的要求,也保证了平台进给的定位精度和长期稳定性。在载荷为100 kg情况下,定位精度达±2 nm,行程大于10μm。实验结果表明,大载荷纳米微动台能够满足大质量部件的纳米级超精密定位需求。
纳米定位;压电陶瓷;气浮导轨;电容微位移传感器
随着当前精密工程技术和尖端科学研究领域的高速发展,纳米级微定位技术的需求也与日俱增,纳米级的高分辨率、高精度且高可靠性的微动平台,在大面积光栅制作和大口径主动光学等领域发挥着越来越重要的作用。目前,在纳米机械加工、微电子、微机电系统和生物医学等领域所采用的纳米级微定位技术,普遍采用压电陶瓷和柔性铰链直接驱动的方案,压电陶瓷具有结构简单、分辨率高、快速频响以及没有发热问题等优点,被广泛应用于各种精密定位场合[1-3]。传统的直驱方案结构简单紧凑,定位噪声小,但载荷能力差,采用电阻应变片式位移传感器实现反馈也难以满足全行程纳米级高精度的定位需求[4],双频激光干涉仪的使用又存在成本太高以及对使用环境条件要求苛刻等问题[5],这些问题使得纳米级定位技术在具体的生产应用中,尤其是在超精密光学工程领域的应用中受到严重限制。
本系统采用工控机作为控制平台,由双压电陶瓷致动器结合柔性铰链驱动基于双闭式气浮导轨的承载台[6-7],由电容微位移传感器实时检测承载台的位移并反馈给工控机形成闭环控制[8]。在保证了载荷能力和进给刚度的情况下,使得在行程范围内系统定位精度大大提高。
1 机械结构
大载荷纳米微动台由气浮承载台和微动驱动机构2大部分组成,如图1所示。
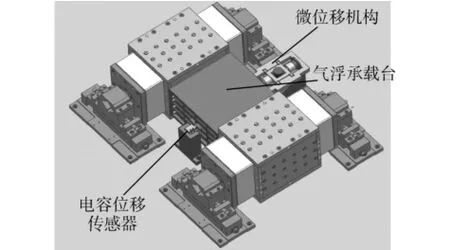
图1 纳米微动台系统结构
气浮承载台由2根闭式气浮导轨和承载工作台组成。定导轨采用花岗岩,动导轨以及承载工作台采用铝基复合材料,这2种材料都具有强度高且线膨胀系数小的特点。气体静压定导轨两侧均采用典型的V型支撑结构。微动驱动机构具体由压电陶瓷致动器和柔性铰链框组成,具体结构如图2所示。柔性铰链框由整块40Cr经慢走丝线切割(切割精度2μm,表面粗糙度Ra值0.2μm)精密切割而成,包含内框与外框,内框采用宝石过盈接触方式(聚四氟乙烯保持架)与GCr15SiMn基座连接,外框与承载工作台固接,当内外框之间的2个压电陶瓷同步产生推拉式位移运动时,气浮承载台也就与固定基座发生同步相对运动。气浮承载台的位移情况由电容微位移传感器实时监测,并保证被测点沿进给方向与承载台质心等高。

图2 微动驱动机构结构
2 闭环控制系统
该大载荷纳米微动台采取了基于电容微位移传感器的闭环控制方案,控制原理如图3所示。

图3 闭环控制系统工作原理
由上位工控机给定目标位移值,并通过USB接口发出相应指令到压电陶瓷驱动控制系统,由该驱动控制系统产生2个推拉式的高压信号驱动2个压电陶瓷致动器同步伸缩运动,每个压电陶瓷致动器内部集成了strain gauge sensor(SGS)位移传感器,利用压电陶瓷伺服控制器内嵌的非线性消除算法,在每个大闭环的伺服周期内对压电陶瓷单体的单步位移进行前馈与半闭环反馈控制。然后工控机依据电容微位移传感器采集到的终端微动台的位移进行全闭环反馈控制,微量调节2个压电陶瓷的推拉式输出位移,实现纳米微动台的超精密定位。
2.1 控制系统硬件设计
工控机采用研华IPC610H型,压电陶瓷驱动控制系统选用德国PI公司的产品,包括接口显示器E-517、电源放大驱动器E-508、伺服控制器E-509和2个压电陶瓷致动器单体。E-517能够通过USB接口与上位机通信,具有24位A/D、D/A和数显功能;E-508标准输出1 100 V高电压,噪声均方根值为5 mV;E-509内部集成了压电陶瓷非线性消除算法,能够实现基于压电陶瓷内部SGS式位移传感器的闭环反馈控制,控制精度也可达0.1%。压电陶瓷致动器选用的是P-225.1S型,分辨率0.3 nm,闭环行程15μm,推力达12 500 N。上述模块化的单元全都可配置在控制系统机箱E-500.00中。
电容微位移传感器是整个系统精度实现的必要条件,由于其具有非接触测量、结构简单、动态特性好等特点,并且具有亚纳米级分辨率以及纳米级精度,在小行程、高精度应用需求的工业生产和科学研究中得到广泛应用。因此本方案最终选用电容微位移传感器作为测量手段。方案中选用德国米铱Ca-paNCDT6500系列高精度电容式位移传感器,探头量程50μm,分辨率0.037 5 nm(2 Hz),重复性0.15 nm,温度稳定性-10×10-6/℃,出厂校正精度达0.02%,Ethernet24位接口,8 kHz的数据更新率,除了电容微位移传感器自身的误差之外,还有环境误差和安装误差也是最终影响测量精度的重要因素[9],需全面考虑其使用环境条件。若依据微动台10μm的最大行程计算,则对应系统测量精度将达2 nm。
2.2 控制系统软件设计
后台定位控制算法采用串级控制,主回路利用电容微位移传感器对微动台的实时位移进行监测,采用PI控制算法[10],完成纳米级或亚纳米级微量的调整,保证纳米微动台最终的微位移精度;副回路采用前馈、反馈相结合控制算法,前馈补偿用来消除压电陶瓷致动器的非线性影响,反馈控制用来提高压电陶瓷单体对目标位移的跟踪能力,该复合控制算法集成在压电陶瓷伺服控制器内部,其算法原理如图4所示。
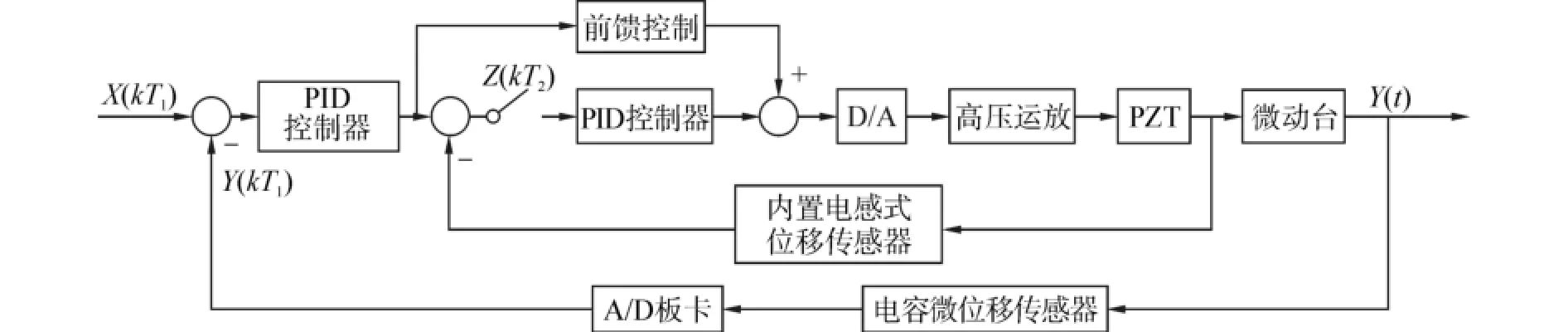
图4 系统闭环控制算法原理
在VS2010软件平台上开发了基于压电陶瓷控制系统和电容微位移传感器的DLL的上位操控软件,该界面分为压电陶瓷监控区、电容微位移显示区和微动台闭环监控3大功能区,具体如图5所示。

图5 上位监控界面
压电陶瓷监控区具有压电陶瓷单体半闭环运动的操控功能,并显示2个压电陶瓷单体的绝对伸长量信息。电容微位移显示区对微动台的绝对位置进行跟踪。微动台闭环监控区设计了相对位移运动和绝对位移运动2种运动模式。
3 实验结果与分析
实验室采用房中房结构,外层房设有温湿度控制系统,温度控制精度20±0.1℃,湿度控制精度40%± 1%,并将工控机、压电陶瓷控制系统等热源从核心工作间隔离开。整个装置放置在一个具有独立混凝土地基的重达10 t的花岗岩隔振平台上,电容微位移传感器探头的基座材料也都采用花岗岩和铟钢,降低环境因素对材料稳定性和测量准确度的影响。

图6 连续相对步进运动曲线
使该纳米微动台工作于相对位移运动模式,连续往同一方向相对运动7个步距,每个步距为50 nm,通过电容微位移传感器全程监测进给运动过程,实验曲线如图6所示。在进给定位过程中过渡时间很短,但稳态数据噪声影响明显(与静态测量幅度一致),对稳态阶段数据进行算术平均处理之后结果如表1所示。

表1 步进定位稳态阶段试验结果
试验数据表明,该纳米微动台在载荷为100 kg情况下,定位精度为2 nm以内。并且在闭环控制作用下,系统已经将柔性铰链外框的线性形变以及局部的非线性应变等因素消除,最终定位误差成随机分布状态,但对于纳米级定位系统,短期的定位噪声与长期的温度漂移通常是决定系统定位精度的制约因素,在我们目前现有实验条件下,短期定位噪声阶段性波动较大,由于温控精度不高,且存在温度梯度,各种材料的热膨胀系数也不相同,电容微位移探头装卡装置稳定性也有待进一步改进,要求微动台定位在某一固定位置时,长期来看会产生低频的偏移。
4 结束语
本文建立了一个较为完整的大载荷纳米级闭环微动台系统,以压电陶瓷结合柔性铰链作为驱动部件,采用双压电陶瓷同步推拉式驱动,结合双闭式气浮导轨技术,利用电容微位移传感器作为反馈测量手段,采用经典的PID控制算法,并给出了连续多步步进50 nm的实验曲线。该纳米微动台在100 kg载荷情况下,行程可达10μm,定位精度达2 nm,该微动台可与其他进给方式相结合,进给行程可扩大,应用范围就可得到进一步拓展。
[1]李明,薛晨阳,翟成瑞.压电陶瓷微位移器特性测试实验研究[J].纳米科技,2009,6(3):61-64.
[2]韩同鹏,李国平,沈杰.基于压电陶瓷微位移执行器的精密定位技术研究[J].传感器与微系统,2010,29(2):51-53.
[3]赵小兴,姜伟,李巍.压电陶瓷作动器非对称迟滞的建模与补偿控制[J].机电工程,2013,30(2):138-140.
[4]蒋志涛,刘品宽,温志杰.基于LVDT和SGS的微定位嵌入式控制系统[J].仪表技术与传感器,2011(8):82-84,103.
[5]于海利.基于双频激光干涉测量的大行程纳米定位技术及其应用研究[D].长春:中国科学院长春光学精密机械与物理研究所,2011:28-35.
[6]齐乃明,陶家生,关英姿,等.气浮导轨误差均化作用的探讨[J].哈尔滨工业大学学报,1997,29(1):61-63.
[7]王俊峰,鲍莉.基于静压气浮导轨的测量仪工作台的研制[J].机床与液压,2010,38(18):33-34,52.
[8]王碧波,岳金福,周泽兵,等.基于二维精密电容微位移传感器的二维纳米定位系统[J].纳米技术与精密工程,2005,3(2):137-141.
[9]刘瑾,杨海马,陈军,等.电容传感器的信号处理及其在机床主轴热变形测量中的应用研究[J].传感技术学报,2011,24(1):149-154.
[10]刘泊,郭建英,孙永全.压电陶瓷微位移驱动器建模与仿真[J].光学精密工程,2013,21(6):1503-1509.
Research and development of large load nano-positioning system based on capacitance disp lacem ent sensor
CHEN Qi
Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China
In order to satisfy the requirement of ultraprecise feeding and positioning ofmassive parts in the domains such as ultraprecise optical engineering,a nano-positioning system that is suitable for the large load situation is presented in this paper.Double closed-type air-lubricated guide rails are used in the design of this nano-positioning stage,which is driven by the double piezoelectric actuators combined with flexible hinge.A capacitance displace-ment sensor is used tomonitor themotion of the load bearing stage and realize feed-back control of the closed loop,which effectively compensates the nonlinearity and hysteresis of piezoelectric actuators and reduces the turbulences caused by release ofstress.The application of the double-rail air-lubricated bearing stage in the traditional transmis-sion gear composed of pure flexible hinge greatly enhances the load ability of the system.The capacitance displace-ment sensor in place of the dual-frequency laser interferometer or strain gauge sensor(SGS)resistor-type displace-ment sensor simplifies the requirement of the system operation,especially themeasurement system for environment,and also guarantees the position precision of feeding and the stability in a long time.The range of the nano-positio-ning stage can reach 10μm with a precision of±2 nm in the situation of bearing 100 kg load.Experimental results show that the large-load nano-positioning stage can satisfy the needs of ultraprecise position ofmassive parts.
nano-positioning;piezoelectric actuator;air-lubricated guide rail;capacitance displacement sensor
TP273.5
:A
:1009-671X(2015)01-062-04
10.3969/j.issn.1009-671X.201407003
http://www.cnki.net/kcms/detail/23.1191.U.20141219.1725.001.htm l
2014-07-08.
日期:2014-12-19.
国家重大科研仪器设备研制专项基金资助项目(61227901).
陈琦(1961-),男,研究员.
陈琦,E-mail:chenqi@ciomp.ac.cn.
