基于BWDSP100的点迹处理算法实现
2015-05-15雷远宏
韩 燕 雷远宏
(中国电子科技集团公司第三十八研究所,安徽 合肥230088)
0 引言
随着国产化武器装备的迫切需求,雷达装备的自主可控提上日程。雷达装备的国产化主要在于雷达系统中的核心处理器芯片的自主可控。随着国家和相关企业对集成电路产业的大量投入,中国集成电路产业得到了快速发展,产生了大量性能优异的芯片产品。中电38所自主研发的高性能通用DSP“魂芯一号”(BWDSP100)就是其中的典型代表。“魂芯一号”DSP在性能方面要优于国际同类产品,同时相关配套开发软件已经成熟,完全可以实现国产芯片在核心信号处理芯片DSP上的自主可控。
雷达系统的主要任务就是对目标进行精确的探测和跟踪。 在雷达数据处理中,点迹处理是航迹数据处理的前提,对目标的准确检测起到了关键作用。
本文通过分析经过脉冲压缩、滤波、恒虚警检测后的雷达回波特性,对雷达回波进行频道选大、距离凝聚和方位凝聚,提取出目标在速度、距离、方位上的有效参数。并以BWDSP100为开发平台,给出了一种点迹处理实现方案,经过实际工程验证,该方案达到了良好的检测效果,证明了其在现代雷达中的实用性。
1 BWDSP100硬件平台
BWDSP系列处理器由中国电子科技集团公司第三十八研究所研制,可广泛运用于各种高性能计算领域,如雷达信号处理、电子对抗、精确制导等领域。其中,BWDSP100是一款32位浮点DSP,同时兼容16位和32位定点数据格式,具有强大的并行处理能力,能较好地满足高速实时信号处理的应用要求。
BWDSP100处理器是一款32bit静态超标量处理器,采用16发射、SIMD架构。处理器指令总线宽度为512bit;内部数据总线采用非对称全双工总线,内部数据读总线位宽为512 bit、内部数据写总线位宽为256bit;工作主频500 MHz,指令周期2ns。内部包含4个基本执行宏,每个执行宏由8个算术逻辑单元、4个乘法器、2个移位器、1个超算器以及1个通用寄存器组组成。完全满足本文中点迹处理算法对DSP平台的要求[1]。
2 点迹处理算法及实现
点迹处理流程主要包括频道选大处理、距离凝聚处理、方位凝聚处理[2-5]。在实现上,采用以C语言为基本框架,BWDSP100汇编语言编写核心模块的架构完成整个处理流程。
2.1 频道选大实现流程设计
根据每个波束的目标落在多个频道的幅度值不同,选出幅度值最大所在的频道号和相邻频道号,以及对应的幅度值。然后根据当前波束的幅度值来比较相邻波束的幅度值,找出波束之间的包络峰值。
多普勒求解是根据目标最大幅度值落在对应频道号找到相邻频道号,以及对应的幅度值,然后根据每个频道代表不同多普勒采用相应算法计算得到目标多普勒速度,通常采用求极值法、质心算法。频道选大实现流程图如图1所示。
2.2 距离凝聚实现流程设计
距离凝聚算法根据同一方位每个波束的目标落在多个距离项上的幅度值不同,选出幅度值最大所在的距离单元和对应的幅度值。同时对该目标的起始距离和结束距离单元进行有效判别。
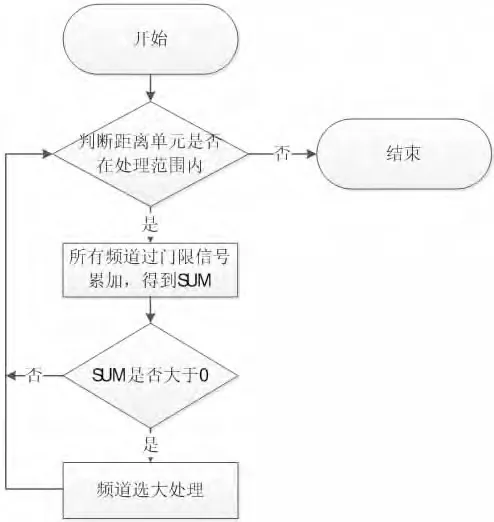
图1 频道选大实现流程图
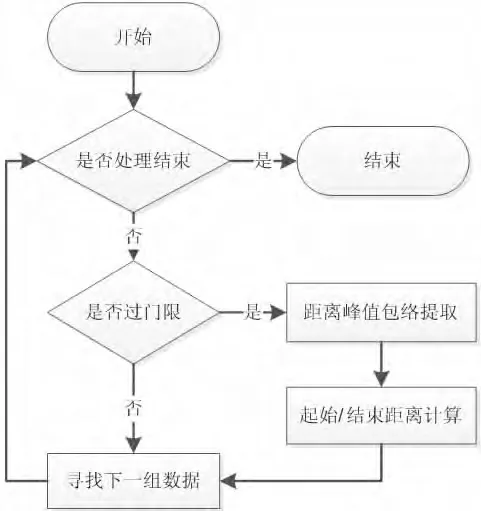
图2 距离凝聚实现流程图

图3 方位凝聚实现流程图
2.3 方位凝聚实现流程设计
方位凝聚实现前需完成水平波束方位相关处理。水平波束方位相关处理是指同一批目标在距离、多普勒、高度等条件相同的情况下,相邻方位间的相关存储。水平波束方位相关分为波束内相关和波束外相关,其原理相同。对于相关上的目标,要进行起始准则判别,对于没有相关上的目标要进行结束准则判别。
根据多个重复周期之间相关上的点迹参数信息并满足开始结束准则,选取幅度值最大所在的方位信息和对应的幅度值。同时对该目标的起始方位和结束方位单元进行有效判别,方位凝聚算法包括求方位中心算法,求方位质心算法,方位内插算法,根据系统性能的需求,可以采取不同算法方式求方位信息。方位凝聚实现流程图如图3所示。
3 结束语
本文主要针对目前雷达装备国产化的需求,给出了一种以BWDSP100为开发平台的雷达点迹处理实现方案。经过实际工程验证,该方案达到了良好的检测效果,证明了其在工程应用中的可行性。
[1]BWDSP100软件用户手册[Z].
[2]雷远宏.地面常规雷达体制下的点迹凝聚算法分析[J].硅谷,2012,7:177-178.
[3][美]Merrill I.Skolnik.雷达手册[M].王军,林强,等,译.北京:电子工业出版社,2003.
[4]周喃.一种基于三坐标雷达的点迹凝聚方法[J].雷达与对抗,2013,33(4):46-50.
[5]董巍.基于VxWorks的雷达点迹数据处理系统的设计与实现[J].信息化研究,2009(9):26-28.
