基于WSNs的无线层析成像定位算法的改进*
2015-05-11王满意丁恩杰
王满意, 丁恩杰
(中国矿业大学 信息与电气工程学院,江苏 徐州 221116)
基于WSNs的无线层析成像定位算法的改进*
王满意, 丁恩杰
(中国矿业大学 信息与电气工程学院,江苏 徐州 221116)
基于无线传感器网络(WSNs)的无源被动定位技术,因无需目标携带任何电子标签,成为当前传感器网络定位领域的研究热点之一。无线层析成像(RTI)定位算法因计算量轻,可实时定位在无源被动定位系统中广泛应用。但目前RTI算法,因未考虑因测量噪声引起的伪位置,这造成目标的真实位置与个数无法辨识。提出使用高斯核滤波的方法消除RTI中的伪位置,实验证明:该方法可行,有效。
无线层析成像; 高斯核滤波; 无线传感器网络
0 引 言
有源定位技术[1],如基于信号到达时间(TOA)、基于信号到达时间差(TDOA)、基于接收信号强度(RSS)、基于信号接收相位(POA)、基于信号到达角度(AOA)等,都需要被定位的目标携带电子标签,并积极主动配合定位系统向锚节点(已知自身坐标),周期性地发送定位信息,以便定位引擎计算出被定位目标的位置。然而有源定位网络部署周期长,不适用快速部署、紧急救灾的应用场合(如火场、地震发生后的紧急救灾中)。此外,有源定位系统不能保障被定位目标都主动意愿佩戴电子标签,并主动参与定位的整个过程(如恐怖袭击发生时,恐怖分子会想方设法逃避警察定位追踪;养老院的老年人,可能因忘记携带电子标签,造成医护人员不能及时了解老年病人信息)。2007年,Youssef M提出无源被动定位技术[2],与传统无线传感器网络(WSNs)的有源定位系统相比,无源被动定位技术无需目标佩戴任何电子标签,只需要在监测区域的周围部署无线传感器节点,即可完成对该区域目标的定位和跟踪。其典型的定位算法有:网格定位算法[3]、粒子滤波算法[4]和无线层析成像(radio tomography imaging,RTI)法[5]。网格定位算法的传感器节点需部署在监测区域的天花板上,不能做到紧急情况下的快速定位;粒子滤波算法通过多次迭代寻求最优解的方法,估计目标的位置,该算法计算量大不适合实时定位的需求。目前可实时定位的RTI法,因计算量轻成为无源被动定位研究的热点。
1 RTI定位算法原理与存在问题
1.1 RTI定位算法原理
如图1所示,一定数量的传感器节点部署在监测区域的周围,当目标进入被定位区域时,目标周围的链路上的电磁波信号,因折射、反射、吸收等作用,引起相应链路的RSS改变,根据采集到的各通信链路RSS值及其对应链路的位置(节点坐标已知),采用无线层析定位算法,实时估计目标的坐标位置。
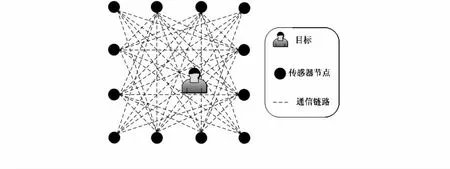
图1 无源定位示意图
1.1.1 通信链路衰减模型
假定监测区域的周围部署了n个传感器节点,有向通信的链路数目为M=n×(n-1)。第i条链路,在时刻t的RSS用γi(t)表示。数学关系表达为[5]
γi(t)=Pi-Li-Si(t)-ni(t).
(1)
其中,Pi为节点发射功率,Li为根据距离有关的大尺度衰落,Si(t)为目标引起的阴影衰落,ni(t)为测量噪声与多径干扰衰落。
RTI将监测区域划分成N个网格(可理解为一幅图片的N个像素点)。阴影衰落Si(t)近似为第i条链路在所有网格中衰减的总和。每个网格对第i条链路的衰减权重取决于该网格中心点坐标到第i条链路的距离。Si(t)的数学表达形式为
(2)
其中,wij为第j个网格对第i条链路的权重,xj(t)为时刻t时,第j个网格的衰减值的大小,椭圆几何关系模型被用来计算所有网格对所有链路的权重模型(见1.1.2节)。

(3)
其中,n=ni(ta)-ni(tb)。考虑到所有网格与所有通信链路的关系,上述的公式可以表示为[5]
Δγ=WΔx+n.
(4)
其中,Δγ为所有链路RSS变化的向量,维数为M×1,Δx表示所有网格的衰减大小,维数为N×1,n表示所有通信链路的测量噪声,维数为M×1,W为维数M×N的权重矩阵,权重矩阵的第N列表示第N个网格,权重矩阵的第M行表示所有网格在第M条链路上的权重值
Δγ=[Δγ1,Δγ2,…,ΔγM]T
Δx=[Δx1,Δx2,…,ΔxN]T
n=[n1,n2,…,nm]T.
(5)
1.1.2 椭圆权重模型
如图2所示, 对链路i,发送和接收节点为椭圆的两个焦点[5],只有网格落在该链路的椭圆内部时,才会影响到通信链路RSS变化,其权重值wij反比于链路长度的平方根,而落在椭圆外部的网格对该链路的影响其权重值为0
(6)
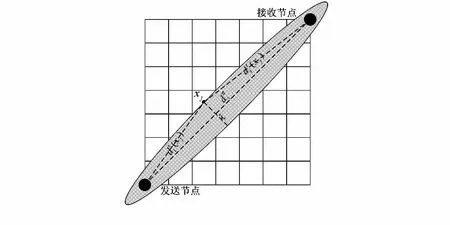
图2 权重模型
1.1.3 位置估计
RTI定位方法视向量Δx的值为监测区域对应网格的像素值,进而得到监测区域的图像。图像中各网格的像素值(向量Δx的值),由公式Δγ=WΔx+n,使用最小二乘法估计得到[6](见公式(7)~式(9)。其中,djk为网格j与网格k的欧氏距离,其余参数代表的含义见表格1。
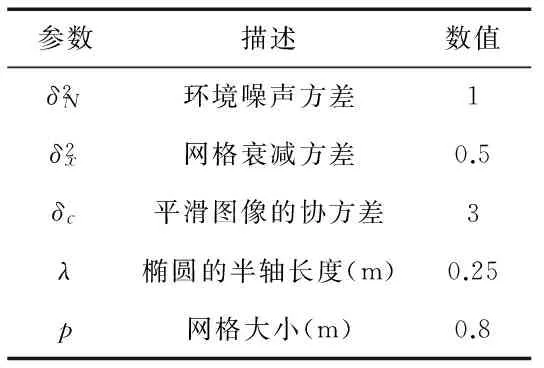
表1 RTI参数

(7)
(8)
(9)
1.2 RTI定位算法存在问题
图像各网格的像素值(向量Δx的值),由公式Δγ=WΔx+n估计得到,但因测量噪声n的存在,使得相同的Δγ输入得到多种不同的图像输出;同时引起实际估算出来的目标位置,淹没在噪声引起的伪位置里面,造成真实的位置估计,无法识别。虽然当前研究工作使用最小二乘法求解该问题,然而,因目标引起的RTI图像变化,与噪声引起的RTI图像变化,仍无法可靠辨识,为此,本文提出基于高斯核函数的滤波方法,减少测量噪声n引起的伪位置的个数。
2 RTI定位算改进
本文提出使用高斯滤波器来解决上述问题,消除RTI中因测量噪声引起的伪位置图像。如公式(10)所示,通过高斯滤波对整幅RTI图像进行加权平均,利用加权平均的方法,求出RTI图像中的每个像素点的值(由其本身和邻域内的其它像素值加权平均得到)
(10)

(11)
3 实验验证与结果分析
实验过程中,选取33个CC2531USB Dongle 无线传感器节点部署在监测区域中(如图3、图4中的黑实点所示),各传感器节点以最大发射功率,0 dBm两两间互相通信。
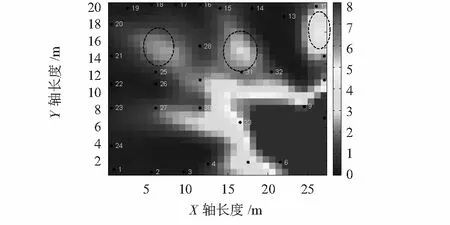
图3 RTI 原始图像
如图3所示,因测量噪声引起的伪位置(虚线椭圆标出),给基于RTI的定位系统带来两个严重后果:1)真实位置因与伪位置混淆在一起,而无法辨识;2)伪位置的存在,使得系统无法辨识定位目标的个数。图4为高斯滤波后的RTI图像。显而易见,高斯滤波器可消除因测量噪声引起的伪位置。

图4 高斯滤波后图像
4 结 论
本文指出了当前无线层析成像法RTI图像中存在的问题,提出使用高斯核滤波的方法消除RTI图像中因测量噪声带来的伪位置。实验结果表明:该滤波方法可滤除RTI图像中测量噪声引起的伪位置,有助于系统识别目标的真实位置和目标个数。
[1] Liu H,Darabi H,Banerjee P, et al.Survey of wireless indoor positioning techniques and systems[J].IEEE Transactions on Systems, Man, and Cybernetics, 2007,37(6):1067-1080.
[2] Youssef M,Mah M,Agrawala A.Challenges: Device-free passive localization for wireless environments[C]∥MobiCom, New York, USA:ACM, 2007: 222-229.
[3] Zhang Dian,Ma Jian,Chen Quanbin, et al.An RF-based system for tracking transceiver-free objects [C]∥Pervasive Computing and Communications, New York, USA: IEEE, 2007:135-144.
[4] Li Yunpeng,Chen Xi,Coates Mark, et al.Sequential monte carlo radiofrequency tomographic tracking [C]∥Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic: IEEE, 2011:3976-3979.
[5] Wilson Joey,Patwari Neal.Radio tomographic imaging with wireless networks[J].IEEE Transactions on Mobile Computing, 2010, 9(5):621-632.
[6] Zhao Yang,Patwari Neal.Noise reduction for variance-based device-free localization and tracking [C]∥Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Utah, USA:IEEE, 2011:179-187.
王满意(1982 -),男,江苏徐州人,博士研究生,从事无线传感器网络定位算法、可重新配置无线传感器网络的研究。
Improvement of radio tomography imaging
localization algorithm based on WSNs*WANG Man-yi, DING En-jie
(School of Information and Electrical Engineering, China University of Mining & Technology, Xuzhou 221116, China)
Device-free localization (DFL) is an emerging technique that can locate targets without taking any electronic tags and becomes a hot topic in the area of localization based on WSNs.Due to light and efficient calculation, radio tomography imaging(RTI) algorithm is widely used in DFL systems.However, the measurement noise, which results in pseudo locations, is not taken into account,which result in actual location and the number of the targets can’t be identified.Gaussian kernel filtering is utilized to remove pseudo locations in RTI,the experiments shows that this method is feasible and effective.
radio tomography imaging(RTI); Gaussian kernel filtering; wireless sensor networks(WSNs)
2015—01—23
国家科技支撑计划资助项目 (2013BAK06B05)
10.13873/J.1000—9787(2015)04—0127—03
TN 925
A
1000—9787(2015)04—0127—03
