基于三维成像声纳技术的AUV前视避障方法*
2015-05-11陈文渊沈斌坚
陈文渊, 沈斌坚
(中国船舶重工集团公司 第七一五研究所,浙江 杭州 310023)
基于三维成像声纳技术的AUV前视避障方法*
陈文渊, 沈斌坚
(中国船舶重工集团公司 第七一五研究所,浙江 杭州 310023)
针对自主式水下航行器(AUV)在水下自主航行过程中的避障问题,提出了一种基于三维成像声纳技术的前视避障方法。该方法使用三维成像声纳探测目标,通过声纳目标图像处理提取目标,完成目标的运动状态分析和轨迹预测。通过设置碰撞区域,建立避障模型和设计避障规则,实现了AUV的智能化避障。借助于其他传感器,这些关联模块构成了一个集目标探测、目标提取、轨迹预测、避障与路线回归等功能于一体的闭环系统。
三维成像声纳;声纳图像处理;目标提取;轨迹预测;自主式水下航行器;避障
0 引 言
自主式水下航行器(autonomous underwater vehicle, AUV)作为新一代智能水下机器人,可依靠自身动力、传感器信息、导航与控制系统,完成目标水域的水下侦察、海底考察等多种任务使命。它具有智能化、航程远、机动性好和隐蔽安全性高等特点,在军民领域有着广泛的应用前景。
AUV在水下航行过程中,必须充分考虑其事先规划路线上的未知障碍物,这就要求它的导航与控制系统能够基于传感器(如三维成像声纳)信息,实时机动并在线调整自身的运动姿态,以规避原路线上的未知障碍物,此即AUV的实时避障功能[1,2]。
本文在简述三维成像声纳原理与实验结果的基础上,论述声纳目标图像的预处理、配准与重建和目标图像提取,并探求基于三维成像声纳动静目标图像提取的AUV实时避障方法。
1 三维成像声纳原理与实验结果
1.1 波束形成模型与方法
三维成像声纳采用二维平面阵,利用相控阵技术,无需进行扇形波束扫描,即可同时获得水平、垂直和景深3个方向上的分辨力。三维成像声纳的波束形成模型如图1所示。
假设接收信号是远场信号,则入射信号的单位方向向量为
则平面阵各阵元(i,j)接收到该信号的时间延迟量为
(1)

图1 三维成像声纳的波束形成模型
式中pi,j=[(i-1)d,(j-1)d,0]T,为(i,j)阵元的位置向量;d为阵元间距;c为声波在水中的传播速度。
当α与β较小时,式(1)可改写为
(2)

1.2 三维成像声纳实验结果
选择正方体框架作为水下声成像目标,通过千兆以太网将波束形成的结果数据以(x,y,z,i)的形式上传到主控PC,并在HSV颜色空间绘制目标图像,如图2所示。

图2 实验目标与图像
由目标图像可以明显看出:实验目标的外观、形状等三维轮廓信息,验证了三维成像声纳工作的正确性。
2 声纳目标图像处理
三维成像声纳的回波数据受水声信道传输的不确定性和目标不规则运动引起的多普勒频移等因素的影响较为严重,由此生成的目标原始图像质量较差,需进行图像降噪处理,再进行多帧配准与重建、目标提取,便于目标运动分析与AUV避障方法研究。
2.1 图像降噪
采用3×3的窗口对目标原始图像进行中值滤波,能够消除孤立点噪声[5](即椒盐噪声),并最大限度地保持图像的细节,提高图像的信噪比。图3所示为U型目标图像的降噪处理。

图3 U型目标图像的降噪处理
中值滤波的运算代价较低,能够满足图像处理的实时性要求。
2.2 图像配准与重建
经降噪处理后,声纳目标的二维序列图像需进行多帧配准与重建才能获得三维可视化效果[4]。
三维成像声纳采用邻近点迭代算法[6,7],将包含同一目标的多帧图像通过重叠区域判断、设置阈值和网格化拼接,使多帧图像形成一个整体,实现目标图像的配准与重建,如图4所示。
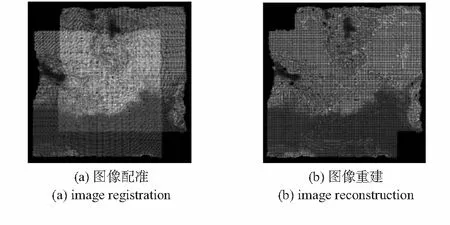
图4 图像配准与重建效果
2.3 目标提取
利用图像区域内部象素之间的相似性和目标与背景在边界处象素的不连续性等差异,使用图像差分算法[8],设置合适阈值,实现目标提取,如图5所示。

图5 图4(b)的目标提取结果
3 AUV实时避障方法
根据AUV和障碍物在水下运动的特点,本节讨论的避障方法基于如下2个假设:1)在规划路线上,AUV做匀速直线运动,巡航速度为2节,速度范围为1~3节;2)障碍物的运动速度较低。
3.1 目标的运动状态分析与轨迹预测
考虑静止、匀速直线运动、匀加速直线运动和变加速直线运动等4种典型的目标运动模型,并规定目标的运动速度方向为:趋近AUV为正,远离AUV为负。为简单起见,研究目标的匀加速直线运动模型,可用下列方程组描述
式中 T为图像序列间隔时间;p为目标的位置;v为目标的运动速度;a为目标运动的加速度;j=0,1,2,…为目标图像序列编号。
对于目标的变加速直线运动,采用牛顿二次插值多项式[9]作为目标的加速度预测模型,并使用递推算法实时修正预测模型,估计目标的运动参数,预测目标的运动轨迹。
3.2 碰撞发生条件与AUV的机动避障
与单波束扫描声纳或多波束声纳等二维声纳相比,基于三维成像声纳的前视避障优点是:AUV可以在三维空间中规避障碍物,成功概率大。
首先,考虑AUV的航向、航速和避障的虚警概率,划定AUV与障碍物的碰撞区域,如图6所示。

图6 AUV的碰撞区域及其表达式
其次,考虑避障过程中AUV与障碍物之间的安全间距,建立能够为AUV提供8个机动节点的正八边形避障模型,如图7所示。

图7 AUV避障模型
再次,由前视三维成像声纳评估障碍物目标的碰撞危险等级,判断其预测运动轨迹是否与AUV的碰撞区域交叉。若二者交叉,则AUV按下列规则机动避障:
1)规则RL1:AUV朝与障碍物的预测运动轨迹在AUV避障模型上的投影方向不平行(优选垂直)的节点机动,若障碍物的运动方向为正,则AUV运动速度增加至3节或保持2节不变;反之,AUV运动速度减小至1节或保持2节不变。
2)规则RL2:考虑到障碍物运动的随机性和复杂性,提高避障的效率和成功概率,当AUV有多个节点选择时,优选AUV朝下潜的节点或距离目标的预测运动轨迹在AUV避障模型上的投影最远的节点机动,运动速度保持2节不变或增加至3节。
3)规则RL3:若前视三维成像声纳声视觉区域全部是障碍物,则AUV减速至0并依据最近一帧声视觉区域非全部障碍物的图像按上述避障规则机动避障,运动速度减小至1节。
4)规则RL4:AUV的多目标避障可归结为求解AUV机动节点解集(或最优解集)的非空交集问题,依次按下列步骤循环实现:
a.将障碍物集合T按碰撞危险等级由高到低排列,得到避障序列{T1,T2,…,Tn};


d.AUV按集合V对应的运动速度朝集合M(或集合M+)对应的节点机动,并在完成本次避障后,由三维成像声纳探测并更新障碍物集合T;
e.若集合T为空集,则AUV完成了多目标避障,开始回归原规划路线;否则,执行(a)步骤。
3.3 运动路线回归
为了保证AUV顺利到达目的地,在其完成避障任务后,应尽快回归原规划路线。因此,应以AUV开始机动的位置为坐标原点,建立图1所示的笛卡尔坐标系,并根据其自身配备的航向传感器、压力传感器和多普勒计程仪等设备实时输出的状态数据,积分计算避障过程中AUV偏离坐标原点的三轴距离分量。通过调整AUV的运动方向和下潜深度,补偿X轴向和Y轴向的距离偏移量,实现AUV运动路线回归。
4 仿真实验
在水下自主航行过程中,假设AUV需要规避规划路线上的2个做匀速直线运动的障碍物目标,目标的运动信息如表1所示。

表1 目标运动信息
前视三维成像声纳通过多次(至少2次)连续探测估计障碍物的运动参数,评估障碍物的碰撞危险等级:障碍物T1的运动速度较高,运动方向为正,距离碰撞发生的时间约16 s;障碍物T2的运动速度较低,运动方向为负,距离碰撞发生的时间约20 s。因此,AUV与T1的碰撞危险等级高于与T2的碰撞危险等级,故AUV将优先规避障碍物T1。
分析障碍物的运动状态,得到其运动轨迹在AUV避障模型上的投影,如图8所示。

图8 障碍物运动轨迹在前视避障模型上的投影

AUV按照上述分析结果实现障碍物T1和T2的智能化避障,动态避障路线如图9所示。

图9 AUV避障路线图
AUV通过三维成像声纳实现障碍物目标T1和T2的持续探测并跟踪预测其运动轨迹,依据避障规则解算避障的机动节点和速度,通过舵机调整自身运动路线,并在完成避障任务后回归原规划路线。
5 结 论
本文讨论的基于前视声纳技术的AUV避障方法,包括三维成像声纳工作原理、声纳目标图像处理、障碍物目标的提取、运动状态分析及轨迹预测、碰撞发生条件、避障方法和AUV的运动路线回归,构成了一个完整的闭环系统。仿真实验验证了文中设计的避障模型与避障规则在AUV智能化避障过程中的实时性和有效性,对其他类型水下机器人的智能化避障和工程实现具有重要的指导意义和参考价值。
[1]PetillotY,RuizIT.Underwatervehicleobstacleavoidanceandpathplanningusingamulti-beamforwardlookingsonar[J].IEEEJournalofOceanicEngineering,2001,26(2): 240-251.
[2]AntonelliG,ChiaveriniS,FinotelloR,etal.Real-timepathplanningandobstacleavoidanceforRAIS:Anautonomousunderwatervehicle[J].IEEEJournalofOceanicEngineering,2001,26(2):216-227.
[3] 陈文渊.二维波束形成快速算法研究[D].北京: 中国舰船研究院,2008: 20-24.
[4] 谌 颖, 叶青华, 黄海宁.采用分级聚焦波束形成的快速声成像算法[J].应用声学,2008, 27(3): 207-211.
[5] 冈萨雷斯·伍德.数字图像处理[M].阮秋琦,译.3版.北京:电子工业出版社, 2011: 197-203.
[6]VittorioM,AndreaT.Threedimensionalimagegenerationandprocessinginunderwateracousticvision[C]∥ProceedingsoftheIEEE,2000: 1903-1946.
[7]VittorioM,AlessandroG,StefanoB.Ageometricapproachtothesegmentationandreconstructionofacousticthree-dimensionalData[C]∥OCEANS’98MTS/IEEE,1998:582-586.
[8]StringaE,RegazzoniCS.Real-timevideo-shotdetectionforscenesurveillanceapplications[J].IEEETransactiononImageProce-ssing,2000,9(1): 69-79.
[9] 蒋尔雄,赵风光,苏仰锋.数值逼近[M].2版.上海:复旦大学出版社,2008: 34-40.
Forward obstacle avoidance method for AUV based on 3D imaging sonar technology*
CHEN Wen-yuan, SHEN Bin-jian
(The 715th Research Institute,China Shipbuilding Industry Corporation,Hangzhou 310023,China)
A forward obstacle avoidance method based on 3D imaging sonar technology is presented,aiming at problem of obstacle avoidance during underwater autonomous navigation for AUV.The method detects sonar targets by using 3D imaging sonar and extracts target via sonar images processing,achieve analysis on moving status of underwater objects and predict moving track.By setting up collision area,build model for obstacle avoidance and design obstacle avoidance rules,realize AUV intelligent obstacles avoidance.With the help of the other sensors,these related modules form an entire closed-loop system which integrates the functions including object detection,object extraction,track prediction,obstacle avoidance and path regression.
3D imaging sonar; sonar images processing; object extraction; path prediction; AUV; obstacle avoidance
10.13873/J.1000—9787(2015)04—0012—04
2015—01—07
国家“863”计划资助项目(2010AA09Z104)
TB 566
A
1000—9787(2015)04—0012—04
陈文渊(1981-),男,安徽蚌埠人,工程师,主要从事高分辨率三维成像声纳的研发和应用。
