基于均值漂移和粒子滤波算法的接触网几何参数检测方法研究
2015-05-10刘文强刘志刚韩志伟
刘文强, 刘志刚, 耿 肖, 韩志伟
(西南交通大学 电气工程学院, 四川 成都 610031)
随着世界各国高速电气化铁路的迅猛发展,列车运行的安全性越来越受到重视。接触网作为电气化铁路供电系统的重要组成部分,其性能的优劣直接决定了机车受流质量,影响列车的运行安全[1]。为了保证机车运行安全,延长受电弓使用寿命,防止“刮弓”或“钻弓”等事故的发生,除了对接触线悬挂的设计、施工和运营有一定的要求外,还必须经常对接触线的导高、拉出值进行检测,以便及时发现和排除隐患,保证接触网处于良好的工作状态。
目前,国内对接触网几何参数的检测形式主要有接触式和非接触式[2]。相较于接触式测量,非接触式检测中检测系统不与检测对象相接触,不会对被检测对象的力学特性产生任何影响。6C检测监测系统技术规范提出,检测方式将大幅度转向快速化、自动化和智能化发展,其中以视觉技术为基础的非接触式检测方式越来越受到研究人员的重视。文献[3]利用对称安装在电力机车上的2台CMOS摄像机采集接触线图像,运用边缘检测寻找磨损创面的边界点,实现导高、拉出值的测量。文献[4]利用弓网视频图像,提取受电弓滑板、接触线的特征值,计算滑板的位移值,归算出接触线的导高、拉出值。文献[5]利用受电弓与接触线的成像特点,先识别受电弓,后定位接触线,然后利用摄像机标定计算接触线的导高、拉出值。文献[6]利用架设在机车顶部的单个摄像机拍取图片,通过图像处理定位计算接触线的导高、拉出值。这些检测方法在检测系统中都有一定的应用,并且取得了一定的效果,但是由于列车运行时速的提高,运行密度的增加,这些方法在检测精度及图像数据的实时处理上已经很难满足当前的检测需求。
基于视觉技术的目标检测与跟踪算法是当前计算机视觉领域的研究热点之一。当前主流的目标跟踪算法主要分为两类[7]:确定性和随机性跟踪算法。均值漂移(Mean Shift)是确定性跟踪算法的代表,以其不需要参数、不需要进行穷尽搜索等特性,已经成功地应用在对实时性要求较高的目标跟踪领域,但是当背景比较复杂时,容易陷入局部极值,跟踪效果并不理想。粒子滤波(Particle Filter,PF)是随机性跟踪算法的代表,以其随机特性使之避免陷入局部极优,但必须设置大量数目的粒子,以牺牲算法实时性为代价提高样本估计的准确度。
近年来,人们提出了Mean Shift和粒子滤波混合的算法( Mean Shift Particle Filter,MSPF)[8]。MSPF算法实现了两者方法的优势互补,且其性能优于单独使用两者中任何一种算法的效果[9]。
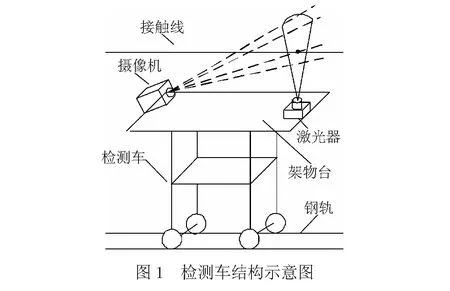
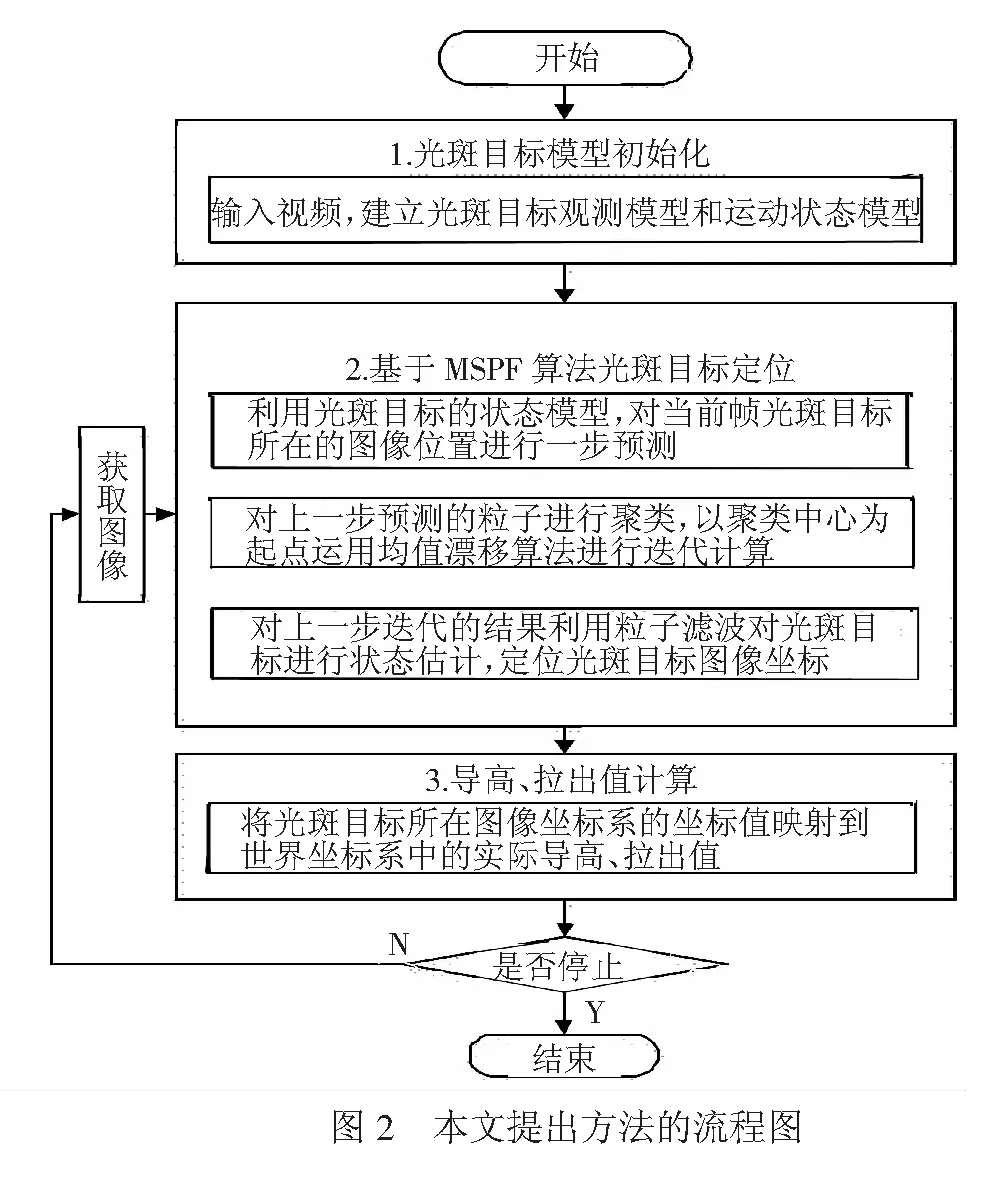
针对上述问题,本文基于单摄像机的接触线几何参数检测原理[6],提出了一种基于均值漂移和粒子滤波算法的接触网几何参数检测方法,检测车结构见图1。首先,基于灰度颜色直方图特征分布和接触网“之”字形架构建立激光斑点(以下均简称光斑)的目标模型;其次,利用聚类方法对粒子进行聚类,以聚类中心为起点运用均值漂移算法进行迭代计算,对迭代计算的结果利用粒子滤波算法得到光斑目标的图像坐标;最后将光斑目标的图像坐标通过空间变换,得出接触线的几何参数导高和拉出值的测量值。通过与实测数据对比,验证了该方法的有效性。论文提出方法的流程图见图2。
1 光斑目标数据模型
1.1 光斑目标观测模型
本文采用基于灰度颜色直方图特征分布的粒子滤波算法对光斑目标进行定位。
首先,初始化目标区域。本文通过手动进行选取,以光斑目标区域的中心点为标准,得到包含全部光斑目标在内以及部分背景的像素点的矩形窗口作为跟踪定位窗口,见图3。

其次,将光斑目标窗口区域内的二维像素坐标,映射到以像素值等级u划分的直方图区间索引m上,从而计算光斑目标所在区域的概率密度函数的密度估计,定义为
( 1 )

选用Bhattacharyya距离衡量候选目标颜色分布pu(x)和目标模板颜色分布qu的相似程度。则Bhattacharyya系数为
( 2 )
qu与pu(x)之间的Bhattacharyya距离为
( 3 )
由Bhattacharyya距离d可获得观测概率为
( 4 )
式中:σ为高斯方差。
1.2 光斑目标运动状态模型
随着检测车的移动,打在接触线上的光斑轨迹会沿着接触线的走势而有规律的移动。因此,为准确反映光斑目标随检测车位置变化的规律,快速定位光斑目标。本文根据接触网的架构即“之”字形架构,建立光斑目标的运动状态模型,见图4。

不等高悬挂接触线的数学曲线方程[1]为
( 5 )
式中:Kr为相邻两悬挂点之间接触线在水平投影面的直线斜率;C为拉出值的初始值;H为相邻两悬挂点之间接触线的基础高度;h为相邻两悬挂点的纵向高度差;F为不等高悬挂的斜驰度;l为相邻两悬挂点的横向水平距离;zr为沿列车运行方向的水平位置;yr为接触线的导高。
对式( 5 )进行离散化,并整理得
( 6 )
式( 6 )中,相邻两帧图像导高变化不是很明显,因此,建立模型时用前一帧的导高值估计当前帧以简化模型。
( 7 )
结合坐标变换得出光斑目标状态模型为
Xk=AXk-1+Bξk-1
( 8 )
式中:X=[xy]T;A为状态转移矩阵;B为过程噪声协方差矩阵;ξk-1为k-1时刻过程噪声。
2 基于MSPF光斑目标跟踪定位
2.1 光斑目标跟踪定位
文献[10]在MSPF算法的基础上,引入聚类算法对MSPF进行改进。该算法的核心思想是通过考虑粒子的观测概率和粒子间的距离,优化出更具有代表性的粒子。实验证明:在保证精度基本相同的情况下,该算法与经典的MSPF算法相比降低了计算量。因此,本文采用文献[10]的算法进行光斑目标跟踪定位。
2.2 光斑目标跟踪定位算法实现
方程( 4 )和方程( 8 )构成了光斑目标的动态系统,本文采用的MSPF算法的具体实现步骤如下。
2.2.1 初始化
2.2.2 重要性采样
将粒子集中的每个粒子带入目标的动态方程中,传递得到新的粒子集。
2.2.3 聚类
聚类步骤如下:
Step1将更新的粒子带入式( 4 )中,计算粒子的观测概率p。
Step2选取p最大的粒子作为分组聚类中心,计算其余成员粒子与各个聚类小组中心的距离,将其与预设的距离阈值R进行比较,如果其小于阈值R,则把它们归为一类。
Step3从剩余大于阈值R的粒子中选取p最大的粒子作为分组聚类中心, 执行Step1步骤。
Step4当所有粒子都分组聚类完成后,若类数小于设定的聚类个数C,则聚类结束;否则,调大阈值R,重新执行Step2步骤,直到满足条件为止。
2.2.4 均值漂移
以聚类中心点开始均值漂移定位算法。令c0(x0,y0)为给定的聚类中心位置c,则均值漂移算法步骤如下:
Step1计算粒子c的观测特征即目标各点权值。
( 9 )
Step2计算获取粒子c的新位置。
(10)
Step3判断c1处是否满足以下2个迭代停止条件,否则令返回Step1继续循环。
ρ[pu(c1),qu]<ρ[pu(c0),qu]
(11)
‖y1-y0‖<ε
(12)
2.2.5 粒子集更新和权值计算
2.2.6 光斑目标状态估计
(13)
2.2.7 重采样
采用随机抽样方法[11],通过减少权值较小的粒子,复制权值较大的粒子数对粒子进行重采样。
3 导高、拉出值计算
利用空间坐标变换的方法将式(13)定位的光斑目标图像坐标,映射到世界坐标系下,从而求得接触网几何参数导高和拉出值。

结合检测车参数示意图6,将打在接触线上的光斑目标在世界坐标系下的坐标点E(Xw,Yw,Zw)经过空间坐标变换,映射到图像平面坐标系下的投影坐标点P(U,V),主要经过3个过程。首先,将光斑目标在世界坐标系XwYwZw下的坐标映射到摄像机坐标系XcYcZc下;其次,将光斑目标在摄像机坐标系下的坐标映射到图像物理坐标系XY下;最后,将光斑目标在图像物理坐标系下的坐标映射到图像平面坐标系下即坐标点P(U,V)。整个变换的具体过程如下:
图6中,f表示Oc与O之间的距离即摄像机的焦距,θ为摄像机与架物台之间的角度,D表示架物台到轨平面的距离,L为架物台的前后长度。
3.1 世界坐标系与摄像机坐标系的变换
根据摄像机坐标系与世界坐标系只存在旋转平移变换,故根据检测车参数示意图得到如下变换关系。
旋转变换矩阵为
(14)
平移变换矩阵为
(15)
最终变换矩阵M为
M=MRotMTrans=

(16)
得到世界坐标系中(Xw,Yw,Zw)点与摄像机坐标系中(Xc,Yc,Zc)点的对应关系
(17)
3.2 摄像机坐标系与图像物理坐标系的变换
根据摄像机针孔成像模型,摄像机坐标系的点(Xc,Yc,Zc)与图像物理坐标系的点(X,Y)的关系
(18)
3.3 图像平面坐标系与图像物理坐标系的变换
图像平面坐标系的点代表的是像素的行数和列数,其相邻两像素点之间的距离与图像物理坐标系的坐标存在一定的比例系数。根据此特性,得到图像平面坐标系中点(U,V)与图像物理坐标系中点(X,Y)对应关系
(19)
式中:ΔX、ΔY分别为图像横、纵向相邻像素点间的物理间距,本文取ΔX=ΔY。
根据式(17)~式(19)即可得到光斑目标在世界坐标系的坐标(Xw,Yw,Zw)与其在图像平面坐标系的相应坐标(U,V),从而求得接触线导高、拉出值。两坐标系之间的关系为
(20)
最后,利用文献[12]的线性标定方法,求出摄像机参数U0、V0、f、θ、D、L。该方法采用的模型简单,操作便捷,具有较高的标定精度。
4 实验结果分析
根据第2节和第3节建立的光斑目标定位公式(13)和导高、拉出值的计算公式(20),本文通过将其应用到现场实测的图像序列(每隔0.5 m拍摄一张),并与相应的标准检测值进行对比,从而验证光斑目标定位方法的准确性,导高、拉出值测量的精确性以及系统检测的实时性。
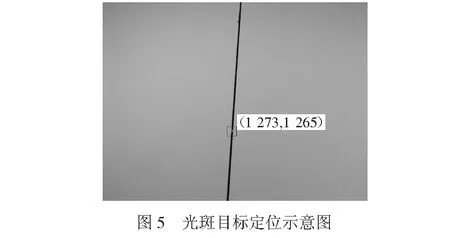
4.1 光斑目标定位
为验证光斑目标定位方法的准确性,运用本文方法对接触线图像中光斑目标的图像坐标进行定位计算,并将直接从图像中读取的坐标作为标准,将二者的绝对差值(绝对误差)及其平均值,作为评价本文算法的性能指标,结果见图7。

定位结果表明:通过运用本文的定位方法,能够使光斑目标在x轴方向上定位的绝对误差在8个像素点以内,平均误差约为3.87个像素点,在y轴方向上定位的绝对误差在7个像素点以内,平均误差约为3.33个像素点,基本能够较为准确的定位光斑目标的图像坐标,定位效果较好。且较文献[6]的方法在x轴方向上定位的绝对误差在10个像素点以内,在y轴方向上定位的绝对误差在12个像素点以内有了较为明显的提高,进而验证本方法定位的准确性。
4.2 目标测量
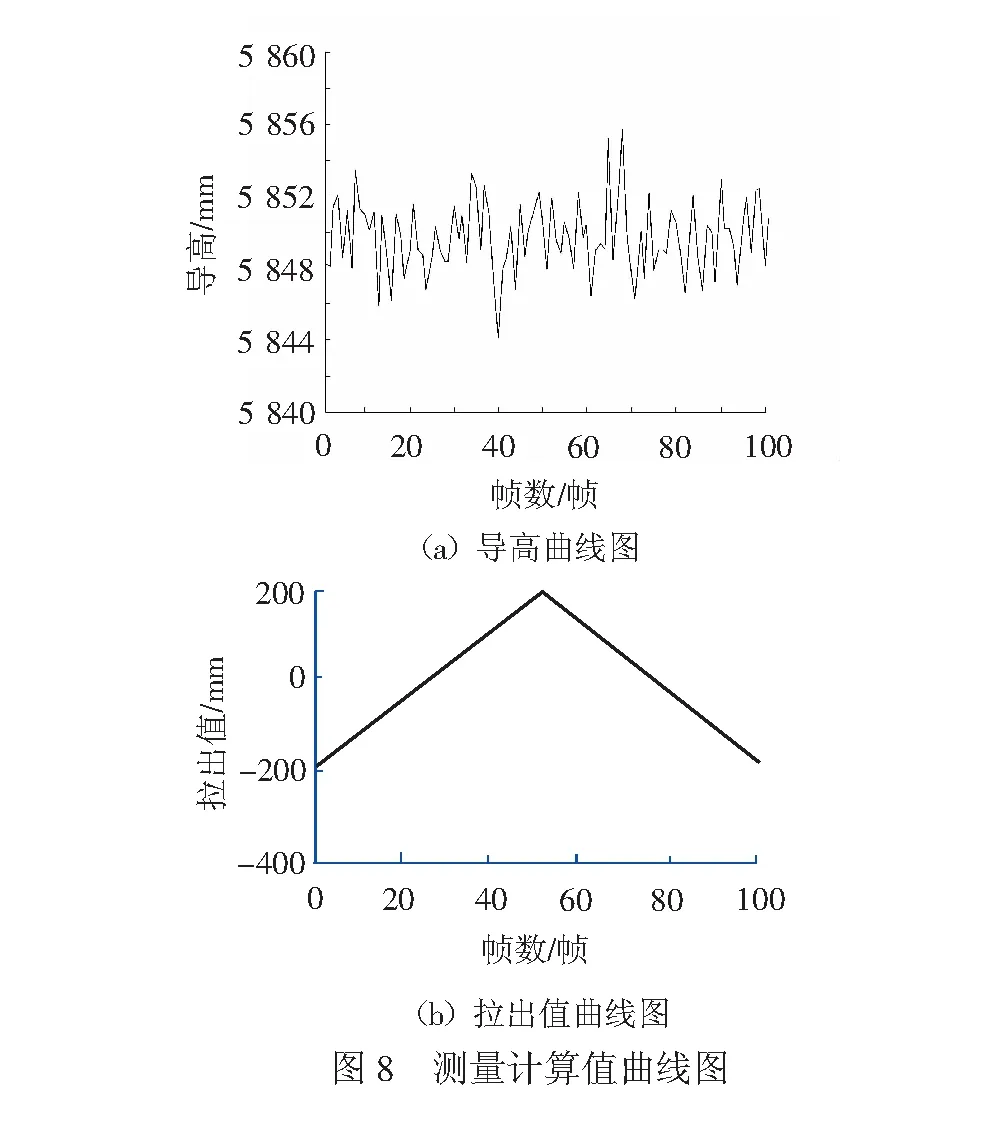
运用本文方法对接触线导高、拉出值进行测量计算,检测结果见图8。
为验证导高、拉出值测量的精确性,将光学仪器直接读取的测量值作为标准,将二者的绝对差值(检测精度)及其平均值,作为评价本文算法的性能指标,结果见图9。

检测结果表明:通过运用本文的检测方法,可以使拉出值检测精度在7个mm内且平均误差为2.21 mm,导高检测精度在6个mm内且平均误差为1.61 mm,能够满足接触网在线弓网检测装置的主要技术指标[13](拉出值精度小于25 mm,导高精度小于10 mm),且较文献[6]的方法拉出值精度在10个mm内,导高精度在11个mm内有了较为明显的提高,进而验证本方法的可行性。
4.3 系统检测耗时分析
为验证本系统检测的实时性,本文选取由摄像机拍取的100帧连续图像,运用本文的方法进行耗时分析。实验平台为:Windows 7 32位操作系统,CPU主频2.4 GHz,RAM内存4.00GB的PC,编程环境为Matlab 2013。系统单帧图像检测耗时计算结果见图10。
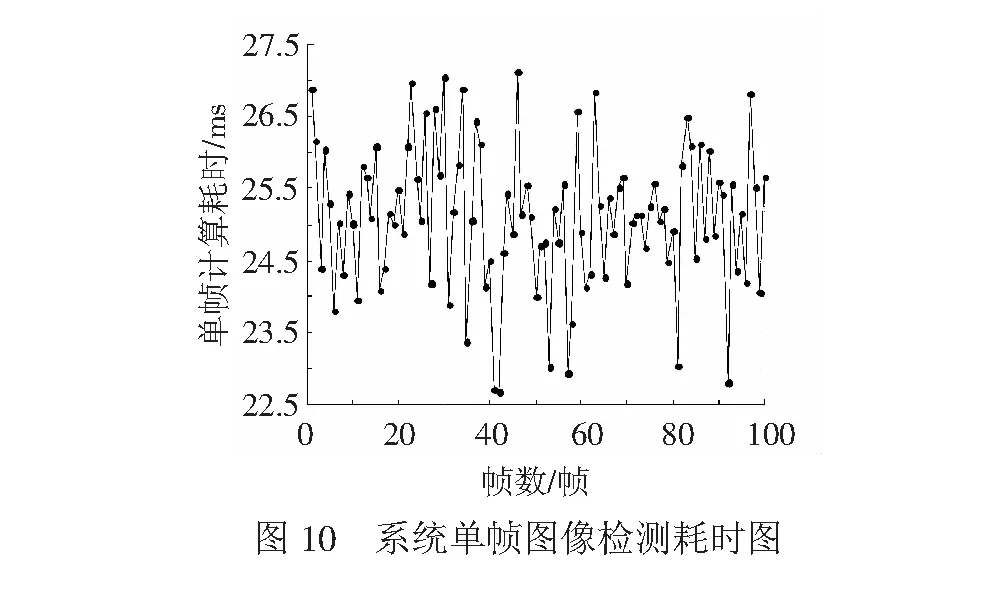
测试结果表明:在考虑检测车的运行速度和接触线曲线绘制需求的情况下,运用本方法处理单帧图像的用时基本在22.5~27.5 ms以内,平均时间约为25.035 ms,能够使检测车的最大检测时速达到72 km/h,基本上能够满足在普速下系统对实时检测的要求,且相较文献[6]中对全局图像进行处理定位计算的方法,耗时更少。
5 结论
随着高速铁路的快速发展,传统的接触式检测已经很难满足线路不良状态的在线检测工作。基于计算机视觉技术的非接触式接触网在线检测技术越来越受到重视。本文在此研究背景下,针对该技术在检测系统的实时性和精确性方面的应用做了一定的研究和尝试,通过利用均值漂移和粒子滤波相结合的方法对系统检测的实时性和精确性方面进行了一定的改善,基本达到了预期的效果,为提高接触线几何参数检测系统的实时性、精确性提供了新思路。
参考文献:
[1] 于万聚. 高速电气化铁路接触网[M]. 成都:西南交通大学出版社, 2003.
[2] 韩志伟,刘志刚,张桂南,等. 非接触式弓网图像检测技术研究综述[J]. 铁道学报,2013,35(6):40-47.
HAN Zhi-wei, LIU Zhi-gang, ZHANG Gui-nan, et al. Overview of Non-contact Image Detection Technology for Pantograph-catenary Monitoring[J]. Journal of the China Railway Society, 2013,35(6):40-47.
[3] 潘雪涛,张亚锋,孟飞,等. 电力机车接触导线几何参数光电检测系统[J]. 仪表技术与传感器,2011,(3):38-41.
PAN Xue-tao, ZHANG Ya-feng, MENG Fei, et al. Photo-electronic Measurement System on Geometry Parameter of Electric Locomotive Contact Wire[J]. Instrument Technique and Sensor, 2011,(3):38-41.
[4] 刘寅秋,韩通新,刘会平. 基于图像处理的接触网动态几何参数测量研究[J]. 铁道机车车辆,2012, 32(5):86-91.
LIU Yin-qiu, HAN Tong-xin, LIU Hui-ping. Study on OCS Dynamic Geometric Parameters Detection Based on Image Processing[J]. Railway Locomotive & Car, 2012, 32(5):86-91.
[5] 张国山,凌朝清,王欣博,等. 接触线几何参数图像检测系统设计[J]. 天津工业大学学报,2014,33(5):57-62.
ZHANG Guo-shan, LING Chao-qing, WANG Xin-bo, et al. Image Detection System Design for Geometry Parameters of Contact Line[J]. Journal of the Tianjin Polytechnic University, 2014, 33(5):57-62.
[6] 张桂南,刘志刚,刘文强,等. 基于摄像机标定的非接触式接触线导高和拉出值的检测[J]. 铁道学报,2014,36(3):25-30.
ZHANG Gui-nan, LIU Zhi-gang, LIU Wen-qiang, et al. Non-contact Detection of Conductor Height & Stagger of Contact Line Based on Camera Calibration[J]. Journal of the China Railway Society, 2014, 36(3):25-30.
[7] 蒋旻,许勤,尚涛,等. 基于粒子滤波和Mean-shift的跟踪算法[J]. 计算机工程,2010,36(5):21-25.
JIANG Min, XU Qin, SHANG Tao, et al. Tracking Algorithm Based on Particle Filtering and Mean-shift[J]. Computer Engineering, 2010, 36(5):21-25.
[8] SHAN Cai-feng, TAN Tie-niu, WEI Yu-cheng. Real-time Hand Tracking Using a Mean-shift Embedded Particle Filter[J]. Pattern Recognition, 2007, 40(7):1958-1970.
[9] 李科,徐克虎,黄大山. 改进的均值漂移和粒子滤波混合跟踪方法[J]. 计算机应用,2012,32(2):504-506.
LI Ke, XU Ke-hu, HUANG Da-shan. Improved Object Tracking Method Based on Mean Shift and Particle Filter[J]. Journal of Computer Applications, 2012, 32(2):504-506.
[10] 胡士强,敬忠良. 粒子滤波原理及其应用[M]. 北京:科学出版社,2010.
[11] LUI J S, CHEN R. Sequential Monte Carlo Methods for Dynamic Systems[J]. Journal of the American Statistical Association, 1998, 93(443):1032.
[12] 张伟华,陈军. CCD摄像机标定[J]. 传感器与微系统, 2009, 28(2):107-109.
ZHANG Wei-hua, CHEN Jun. CCD Camera Calibration[J]. Transducer and Microsystem Technologies, 2009, 28(2):107-109.
[13] 中华人民共和国铁道部运输局供电部,中国铁道科学研究院,西南交通大学.高速铁路供电安全检测监测系统(6C系统)总体技术规范[R]. 北京:中华人民共和国铁道部,2012.
