跟踪图像生成技术应用于光电设备模拟训练
2015-05-10于洋,李丹
于 洋,李 丹
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
在部队的日常训练中,光电设备往往由于缺乏合作目标,对操作人员训练往往只能停留在理论层次上,无法完成设备工作过程中对设备使用的训练要求,而模拟作战使用过程中最大的难点便是光电设备目标跟踪图像的模拟,在以往有些光电设备中,往往采用图像注入的方法来虚拟跟踪图像[1-4],但图像注入存在以下几个缺点:
(1)硬件复杂度高。图像注入往往采用嵌入式系统生成虚拟跟踪图像,在模拟训练中,接收跟踪探测器采集到的图像,根据光电设备转台的位置在图像中相应位置加入虚拟目标,并将迭加目标后的图像输出至监视系统。
(2)图像仿真度较差。在利用注入式系统虚拟跟踪图像时,受注入式系统硬件资源的限制,往往只能模拟点目标,无法真实地模拟目标的姿态及外形,这便使操作人员对跟踪过程中的目标观察不够直观。
针对以上两种情况,在本文中采用计算机生成虚拟跟踪目标,相比于以往的嵌入式图像注入系统,利用计算机模拟跟踪图像具有较大的优势,主要表现在:
(1)在光电设备中,往往采用计算机对跟踪图像进行记录或显示,利用计算机对跟踪图像进行模拟时,无需添加额外的硬件设备,只需在相应的图像采集软件中增加相应的图像处理算法即可。
(2)计算机具有较大的存储空间,可以存储大量目标的参数及形态信息,在利用计算机模拟跟踪图像时,可以通过相应的算法生成具有目标形态的虚拟目标,使虚拟跟踪图像更为真实。
但利用计算机生成虚拟跟踪图像的最大的问题便是处理耗时,计算机的处理速度往往不如嵌入式系统快,其处理图像的耗时相对较大,本文通过相应的算法优化,将处理延时控制在图像的采用周期内,保证图像处理过程不影响图像的采集。
2 虚拟目标三维投影变换算法
在利用计算机生成虚拟目标时,以往采用的方法是利用一些仿真软件对虚拟目标进行生成[5-7],但利用第三方软件生成虚拟图像时运算量很大,往往无法实时生成虚拟目标的要求,因此在本文中,根据目标的旋转角度,将目标的三视图通过一定的坐标变换,计算三视图上的像素点投影到三维图形中的相应位置,再将三维图形投影到平面上,使虚拟目标看起来具有立体效果,该方法具有运算量少,实时性好的优点。这里选用F35飞机的模型的三视图,如图1所示。

图1 目标三视图Fig.1 Three view of target
在利用目标的三视图数据生成三维图像时,首先应计算相应的旋转矩阵,设目标绕X轴、Y轴、Z 轴旋转的角度分别为θX、θY、θZ,如图 2所示。

图2 坐标旋转变换示意图Fig.2 Diagram of coordinate rotation transformation
则对应的3个坐标轴的旋转矩阵分别为:

设目标模型三视图中对应图像的大小分别为:W1×H1,W2×H2,W3×H3,则由对应的比例关系可知:

WW、HW、HH为引进的变量。首先计算三维图形的中心,由坐标变换可得:

则图像中心在二维平面上的投影坐标为:
则其他各点对应三维图形的坐标为:

式中:XWW、YHW、ZHH分别为目标三视图中的对应点,则三维图像在二维平面上的投影坐标为:
式中:W3d、H3d为生成三维图像的大小,考虑到当图像旋转时,图像的尺寸会增加,因此将存放生成的三维图像的缓存开的大一些,以防止在存放生成三维图像时缓存溢出,这里选取
W3d=H3d=2×WW,
则虚拟目标三维投影变换算法对目标的三视图进行变换,选取适当的旋转角度,生成的图像如图3所示。

图3 虚拟目标三维投影图Fig.3 Three dimension projection of dummy target
3 模拟跟踪图像生成算法
在模拟跟踪图像的算法中,需完成的工作有:(1)跟踪目标的理论弹道计算目标姿态,进而求得生成虚拟目标时的旋转角度;
(2)根据目标位置和跟踪转台指向计算目标脱靶量,求出目标在跟踪图像中的位置,根据目标与观测设备的距离、目标尺寸、探测器的光学参数求得目标在视场中的大小,对目标图像进行相应的比例变换后并将其迭加至背景图像中。
3.1 虚拟跟踪目标姿态计算
模拟跟踪图像的算法中,需要根据目标的理论弹道计算出目标的姿态[8],进而确定生成目标三维图形时的旋转角度,影响目标生成图像的参数有目标的横滚、纵摇、航向以及相对于观测设备的方位角、俯仰角,此外,目标相对于观测设备的距离影响目标在视场中成像的大小,在此也应进行考虑。
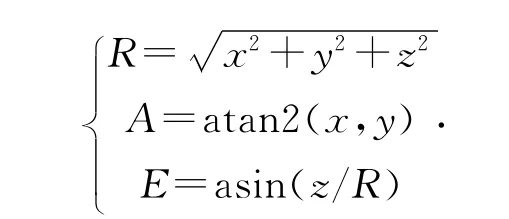
但在目标弹道文件中,往往无法直接给出以上参数信息,一般的目标弹道文件是在地心系下给出目标的位置和速度信息,因此需要相应的变换将理论弹道中的目标位置和速度信息转换成目标的姿态信息。假定目标在地心下的位置和速度分别为X、Y、Z,Vx、Vy、Vz,首先将转换成相对于测站直角坐标系的坐标[9]x、y、z,vx、vy、vz,其中z轴与测站点所处水平面垂直指向上,x轴与z轴垂直指向正东,y轴与z轴垂直指向正北,x、y、z成右手系,如图4所示。

图4 地心系变换成测站直角坐标系Fig.4 Descartes coordinate of observation station for the earth’s core coordinate transformation
进而求得目标相对于测站的距离R、方位角A(正北为方位0°)、俯仰角E分别为:
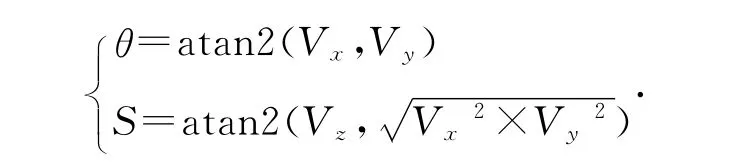
目标的姿态量则依赖于目标的速度,速度的方向决定了目标的航向和纵摇量,设目标测站直角坐标系下的速度分别为vx、vy、vz,则求得目标的航向和纵摇量分别为:
对于目标的横滚量,需要目标的横滚信息数据,但理论弹道一般不会包含该信息,在对图像生成的仿真度要求不高时,可以通过现有的理论弹道数据近似的计算目标的横滚量。不考虑目标作翻滚机动,则目标在直线平飞时的横滚量为0,在转弯时横滚量增加,且速度越快、转弯半径越小时横滚量越大,因此可以将目标的横滚量看成速度和转弯半径的函数,而速度和转弯半径直接反映在目标航向的变化上,因此目标的横滚量可看成航向变化的函数:

式中:Δθ为单位时间内航向的变化率,选取适当的函数f(x),保证其单调递增,且 Δθ=0时Ro=0,即可估算求得目标的横滚量。
计算出目标的姿态量后,可求得生成虚拟目标时对目标三视图像的旋转角度为:
利用第2章中提到的方法,即可求得虚拟目标的图像。
3.2 虚拟目标图像与背景图像合成算法
在将生成的虚拟目标迭加至背景图像中时,需要确定目标在背景图像中的位置和大小,虚拟目标在图像中的位置可由目标位置与光测设备转台编码器位置比较得出:

式中:ΔX、ΔY为目标相对于图像中心的脱靶量,Ac、Ec为光测设备编码器的值,ωw、ωh为光测设备的半视场,w、h分别为光测设备成像CCD的靶面宽度和高度。
目标在背景图像中成像的大小与目标距离和光测设备的光学参数有关,根据目标距离与光测设备的光学参数计算求得迭加目标图像时的缩放率为:

式中:L为实际目标尺寸,wT为实际目标尺寸对应目标三视图上像元尺寸。
在进行图像迭加时,目标的灰度与目标辐射特性、光学大气参数、天空背景灰度、CCD的响应曲线等信息有关[10-14],在无法确定以上 信息的条件下,可以通过一个函数将目标灰度与背景灰度进行关联,将目标灰度看成背景灰度的函数:

式中:GT为目标灰度,GB为对应点的背景灰度,最终将目标图像迭加至背景图像中。
4 实验分析
算法仿真平台为 WindowsXP操作系统,VC++6.0编程环境,计算机处理器采用inter-CoreTM2Qud8400CPU,对F35战斗机跟踪图像进行模拟,选取某光学设备采集到的天空图像作为背景图像,目标尺寸信息及光测设备参数信息如表1所示。

表1 实验参数Tab.1 Experimental parameters
横滚量计算函数选取:

迭加函数选取:经计算在20km时,原始背景图像与迭加目标后的图像如图5、图6所示。

图5 原始背景图像Fig.5 Original background image

图6 迭加目标后的模拟跟踪图像Fig.6 Simulation tracking image after superposing targets
平均处理时间为5.44ms,最大不超过10 ms,对于一般的PAL制式的模拟图像而言,其帧频为25Hz,每一帧图像采集时间为40ms,处理时间可满足图像注入的时间要求。
对虚拟跟踪图像进行视频判读,将判读的结果与目标实际位置进行比较,比较的结果反应了虚拟图像与真实图像的偏差,如图7所示。

图7 虚拟图像偏差Fig.7 Error of visual image
图7为每一帧虚拟图像中目标判读结果与目标实际位置比较结果,左图为方位值比较结果,右图为俯仰值比较结果,单位为角秒。计算其均方根值,最终求得虚拟跟踪图像中虚拟目标精度为:
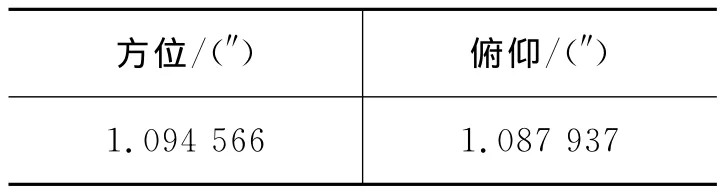
方位/(″) 俯仰/(″)1.094 566 1.087 937
6 结 论
针对光测设备在部队日常训练时无合作目标的问题,研究了一种基于计算机的光测设备模拟跟踪图像生成算法。该算法根据目标的三视图像及弹道信息,生成虚拟目标图像,并结合光测设备本身的光学参数和转台位置信息将生成的虚拟目标图像迭加到光测设备采集到的背景图像中。该算法在相比于以往的嵌入式图像注入系统,不需要增加额外的硬件设备,在硬件复杂度和成本方面都具有较大的优势。同时,利用计算机生成目标的三维图像,具有仿真度高的优点,可以更真实地模拟目标跟踪过程。在算法的时效性上,模拟跟踪图像生成算法处理时耗在5~6ms,远小于标准模拟图像采集周期,可保证在图像的采集过程中完成对虚拟跟踪目标图像的注入过程。通过对虚拟图像的判读结果与目标真实位置进行比较,可求得虚拟图像目标注入精度在1″左右,满足部队日常训练使用要求。
[1] 宋振丰,李岩.基于虚拟图像注入的目标模拟器设计[J].电子技术应用,2009(7):52-54,57.Song Z F,Li Y.Design of target-simulator based on virtual image injection[J].Embedded Technology,2009(7):52-54,57.(in Chinese)
[2] 宋振丰,李岩.数字图像注入式红外目标捕获跟踪训练仿真[J].中国光学与应用光学,2010,3(2):194-200.Song Z F,Li Y.Simulation for IR capturing and tracking train based on digital image injection[J].Chinese Journal of Optics and Applied Optics,2010,3(2):194-200.(in Chinese)
[3] 管目强,李岩,黄梅,等.基于FPGA 的红外图像仿真注入系统[J].中国光学,2011,4(3):277-282.Guan M Q,Li Y,Huang M,et al.Infrared image simulation injection system based on FPGA [J].Chinese Optics,2011,4(3):277-282.(in Chinese)
[4] 吴军辉,李慧,许振领,等.红外捕获跟踪设备闭环注入式仿真试验的理论研究[J].红外与激光工程,2012,41(12):3166-3171.Wu J H,Li H,Xu Z L,et al.Theoretical research on IR capturing and tracking device simulation based on digital image injection[J].Infrared and Laser Engineering,2012,41(12):3166-3171.(in Chinese)
[5] 肖树臣,刘凡,杨尚君.基于 Vega的动态红外图像仿真[J].电光与控制,2012,19(9):4-7,12.Xiao S C,Liu F,Yang S J.Dynamic Infrared Image Simulation Based on Vega[J].Electronics Optics & Control,2012,19(9):4-7,12.(in Chinese)
[6] 刘春雨,郭立红,高峰,等.基于 Vega的红外图像仿真[J].中国光学与应用光学,2010,3(2):177-181.Liu C Y,Guo L H,Gao F,et al.Infrared imaging simulation based on Vega[J].Chinese Journal of Optics and Applied Optics,2010,3(2):177-181.(in Chinese)
[7] 康长青,郭立红,陈灵娟,等.使用Vega传感器模块进行红外图像仿真[J].长春理工大学学报:自然科学版,2009,32(2):242-244.Kang C Q,Guo L H,Chen L J,et al.Simulation of infrared image using vega sensors[J].Journal of Changchun University of Science and Technology:Natural Science Edition,2009,32(2):242-244.(in Chinese)
[8] 吕日好,赵长寿,杨中文,等.空间目标姿态角测量计算方法研究[J].仪器仪表学报,2006,27(6):1211-1212.Lu R H,Zhao C S,Yang Z W,et al.Research on computational method for extended target posture angle[J].Chinese Journal Scientific Instrument,2006,27(6):1211-1212.(in Chinese)
[9] 夏南银,张守信,穆鸿飞,等.航天测控系统[M].北京:国防工业出版社,2002.Xia n Y,Zhang SH X,Mu H F,et al.Space TT&C System [M].Beijing:National Defence Industry Press.2002.
[10] 杨词银,张建萍,曹立华.基于大气透过率比例校正的目标辐射测量[J].光学精密工程,2012,20(7):1626-1635.Yang C Y,Zhang J P,Cao L H.Infrared radiation measurement based on proportional corrected atmospheric transmittance[J].Optics and Precision Engineering,2012,20(7):1626-1635.(in Chinese)
[11] 杨词银,张建萍,曹立华.地基空间目标红外辐射特性测量技术[J].仪器仪表学报,2013,34(2):304-310.Yang C Y,Zhang J P,Cao L H.Ground-based spatial object infrared radiation feature measurement technique[J].Chinese Journal Scientific Instrument,2013,34(2):304-310.(in Chinese)
[12] 李建勋,童中翔,王超哲,等.飞机目标红外特性计算与图像仿真[J].兵工学报,2012,33(11):1310-1318.Li J X,Tong Z X,Wang C Z,et al.Calculation and image simulation of aircraft infrared radiation characteristic[J].Acta Armamentarii,2012,33(11):1310-1318.(in Chinese)
[13] 许洪,王向军,刘峰,等.基于可见光光谱图像的红外多光谱图像仿真生成[J].红外与激光工程,2009,38(2):200-204.Xu H,Wang X J,Liu F,et al.Infrared multispectral image simulation based on spectral images in visible bands[J].Infrared and Laser Engineering,2009,38(2):200-204.(in Chinese)
[14] 邹士迁,郝利锋,徐军华,等.基于红外图像仿真的光电模拟器研究[J].应用光学,2012,33(6):1142-1146.Zou S Q,Hao L F,Xu J H,et al.Electro-optical simulator based on infrared image simulation[J].Journal of Applied Optics,2012,33(6):1142-1146.(in Chinese)
