差分电容硅微加速度计检测电路研究*
2015-05-09徐林鹏王玉朝
王 猛,肖 鹏,徐林鹏,王玉朝,滕 霖
(中航工业西安飞行自动控制研究所,西安 710065)
差分电容硅微加速度计检测电路研究*
王 猛,肖 鹏,徐林鹏,王玉朝,滕 霖*
(中航工业西安飞行自动控制研究所,西安 710065)
针对硅微加速度计中微小差分电容检测,提出了一种基于调制解调方法的闭环检测电路,介绍了该闭环检测系统的原理框图和实现途径。分析了基于单路载波的前置电容-电压(C-V)转换电路,证明了基于相关芯片的解调方法的有效性,其解调效率仅对开环输出有影响;基于双路反馈电路的静电力平衡回路有效提高该检测系统的线性度。结合硅微加速度计参数和电路设计参数,对加速度计系统进行了仿真,仿真结果显示系统稳定,刻度系数为0.9 V/gn左右,带宽700 Hz左右。结合表头进行的精密转台实验结果表明该加速度计系统刻度系数0.88 V/gn,量程可达±13gn。
微加速度计;检测电路;差分电容;调制解调
随着MEMS技术的发展,硅微加速度计在消费电子、汽车、航空航天、导航制导等领域应用日益广泛;近年来国内针对硅微加速度计的研究也从实现基本功能向着高可靠性高精度方向转变。采用静电力驱动、差分电容变化检测位移(或转角)的MEMS加速度计具有结构简单、分辨率高、温漂低、动态响应快等优点[1-3]。
差分电容微加速度计电容变化非常微弱,通常1gn加速度计作用下,加速度计表头电容变化量仅有几个皮法甚至更小,信噪比很低。因此为实现硅微加速度计的高精度检测,需要设计具有较好性能的检测电路[4-7]。
1 差分电容硅微加速度计闭环检测原理与电路设计
1.1 差分电容硅微加速度计闭环检测原理
针对硅微加速度计检测面临的问题,本文设计了一种基于调制-解调方法的检测电路。其原理框图如图1所示。
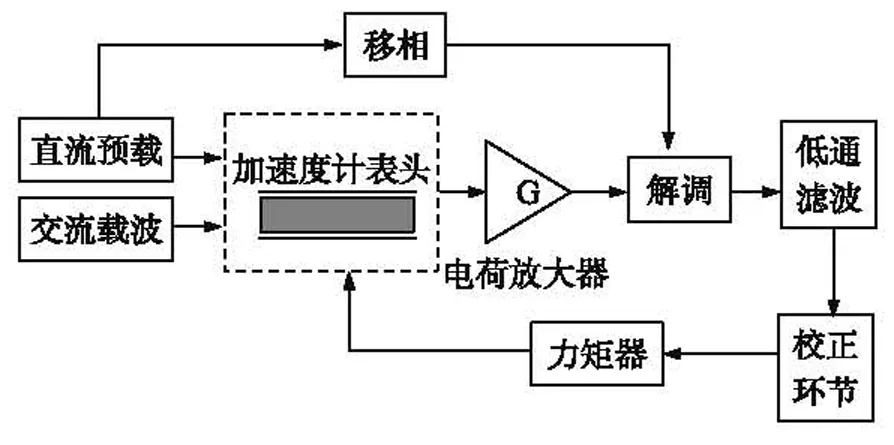
图1 差分电容硅微加速度计检测电路原理框图
该差分电容闭环检测电路的原理为:在外界加速度作用下,敏感元件产生与加速度信号成正比的(角)位移信号,正弦载波将低频信号调制成高频交流信号,该信号经过相敏解调、滤波放大和校正环节后,通过力矩器加载到加速度计表头的上下极板,将敏感元件稳定在零位移位置。闭环稳定状态下,校正环节输出的电压信号与外界加速度信号成正比。
1.2 前置C-V转换电路设计
硅微加速度计表头与地之间存在寄生电容,外围检测电路中也存在很大的寄生电容;为了抑制此类寄生电容的影响,采用单路载波-双路反馈的调制解调方式,将低频加速度信号调制到高频载波中,即将载波信号加载到表头动极板,反馈信号加载到表头固定极板;一般高频载波频率要大于100 kHz。为了减小经过放大电路后信号的失真以及降低对环路中各器件的带宽要求,调制载波采用正弦波。差分电容检测前置C-V转换放大电路如图2所示[8-11]。

图2 差分电容检测前置C-V转换电路
前置C-V转换电路的实质是电荷放大器。U0=V0sin(ωt)是载波,V0为载波幅值,ω为载波角频率频率;C0为基础电容值,在无加速度输入时,两边固定极板与可动极板间电容大小都是C0;当有加速度输入时,电容差分变化值为ΔC;S1、S2为完全一致的运算放大器,采用双通道运放来实现其输出分别为U1和U2;S3为仪表放大器,放大倍数为G,输出为Uo1。Rf和Cf分别为反馈电阻和反馈电容。根据基尔霍夫电压定律和基尔霍夫电流定律,从加速度计表头到两个运算放大器的输出的传递函数为:
(1)
经过仪表放大器之后,传递函数变为:
(2)
相应地,幅频特性和相频特性分别为:
(3)
φ(ω)=-90°-arctan(RfCfω)
(4)
由式(3)、式(4)可知,仪表放大器输出是与载波同频的正弦信号,其幅值与电容变化量成正比;但反馈电阻会引起该输出与载波的相位差,因此载波必须通过移相电路产生参考信号才能对调制波进行解调。

图3 调制信号与参考信号有相位差Δφ时的解调信号
1.3 解调电路设计与讨论
本文设计了基于平衡调制/解调器AD630的相敏解调电路,研究结果表明该解调电路是可行的。
以仪表放大器输出为零相位信号,则调制信号为Uo1=G1V0sin(ωt)。参考信号是载波经过移相电路和比较器得到的,假设其与调制信号Uo1有微小相位差Δφ。
采用基于平衡调制解调器AD630的相敏解调方法时,设置输出增益为2;根据其解调原理,解调输出为
Udem=2sign(Uref)·Uo1
(5)
式中:sign(Uref)是符号函数,即Uref≥0时,sign(Uref)=1;Uref<0时,sign(Uref)=-1。根据式(5),调制信号参考信号有相位差Δφ时,各个信号相位关系如图3所示(已归一化)。
根据图3可得到解调信号的均值为:
(6)
由式(6)可以看出,相位差仅影响解调效率;Δφ≈0时,解调效率近似为1;在闭环工作条件下,开环放大倍数并不影响闭环输出,因此解调效率对闭环输出没有影响。
1.4 静电力平衡回路
微加速度计测量原理中存在非线性,只有在动极板的位移很小时,差动电容变化量才近似地与输入加速度成正比;所以为了提高加速度计的线性度和量程,须使用闭环检测的方法,即开环输出的电压信号经过校正环节,施加到力矩器即表头两定极板上,分别与施加在动极板上的直流预载电压形成电压差,如图4所示;当电压差导致的静电力与外加惯性力平衡时,动极板稳定在平衡位置,闭环稳定[12-15]。

图4 加速度计表头静电力作用示意图
假设外界输入加速度为a,动极板质量为M,加载在动极板上的直流预载电压为Ve,加载在两定极板上的电压分别是Vf和-Vf,动极板和两定极板之间的距离均为d0,板间相对面积A,板间介质相对介电常数和真空介电常数分别为ε和ε0,则在平衡状态下,有:
(7)
由式(7)可得到:
(8)
由式(8)可知,反馈电压也即输出电压与外界输入加速度成正比,而刻度系数Vf/a(单位:V/gn)与预载电压成反比。
2 系统Simulink仿真
根据表头参数及电路设计参数,对加速度计系统建立Simulink仿真模型,如图5所示。仿真考察系统对0gn到1gn阶跃冲击响应特性,以及在不同频率加速度输入下的动特性。时域阶跃响应仿真时间长度为0.25 s,其中阶跃上升沿在0.05 s;700 Hz正弦加速度在0 s时刻输入,仿真时间0.25 s。仿真结果如图6和图7所示。
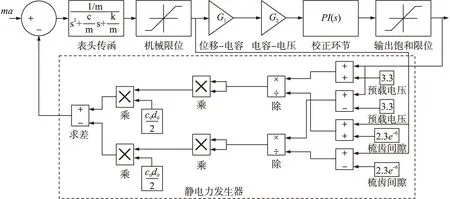
图5 加速度计系统Simulink仿真模型

图6 0 gn到1 gn阶跃冲击下的时域仿真模型
根据阶跃响应仿真结果图6可知,在硅微加计相关参数和电路设计参数条件下,系统在1gn加速度阶跃输入时,阶跃响应无超调,调整时间不超过80 ms;稳定输出在0.9 V左右,也即系统刻度系数为0.9 V/gn。
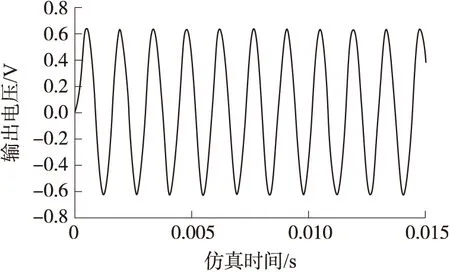
图7 幅值1 gn、频率700 Hz正弦加速度输入的响应
根据正弦输入条件下仿真结果图7可知,系统输出跟随输入同频变化,输入在700 Hz左右时,系统输出相比阶跃响应时的输出下降3 dB,也即系统带宽为700 Hz。
3 实验结果与讨论
按照上述开环和闭环检测原理,对某型号差分电容式硅微加速度计表头搭载所设计的检测电路,进行开环实验和闭环实验。实验采用±12 V直流供电,载波为由高频波形发生器MAX038产生的116 kHz正弦波,预载电压为3.5 V;表头基础电容为28 pF,对加速度的敏感度为1.5 pF/gn。将表头接入电路后放置在精密滚转台上进行360°滚转测试,测试系统示意图如图8所示。

图8 微加速度计测试系统示意图
敏感轴方向与转台平面垂直,转台与竖直方向夹角为θ时,加速度表头敏感到的加速度为gsinθ。在-1gn和+1gn之间,以0.1gn为步长取测试点,得到测试数据与加速度值、滚转台倾角θ之间关系如表1所示。

表1 精密滚转台测试数据(部分)
对加速度值和输出电压进行最小二乘线性拟合,得到拟合曲线如图9所示。
对数据进行拟合的结果表明:该差分电容硅微加速度计闭环测试电路具有良好的线性输出特性和零偏特性,刻度系数为0.88 V/gn,根据供电电压数值±12 V,可知在设计参数下,该硅微加速度计量程为约±13gn;加速度零输入时系统零偏为0.020 13 V,折合成加速度为23 mgn。实验结果与文献[4,6-7]提到的检测方法的实验结果对比可知,该方法增大了系统量程而减小了系统零偏,对提高检测辨识能力有积极作用。
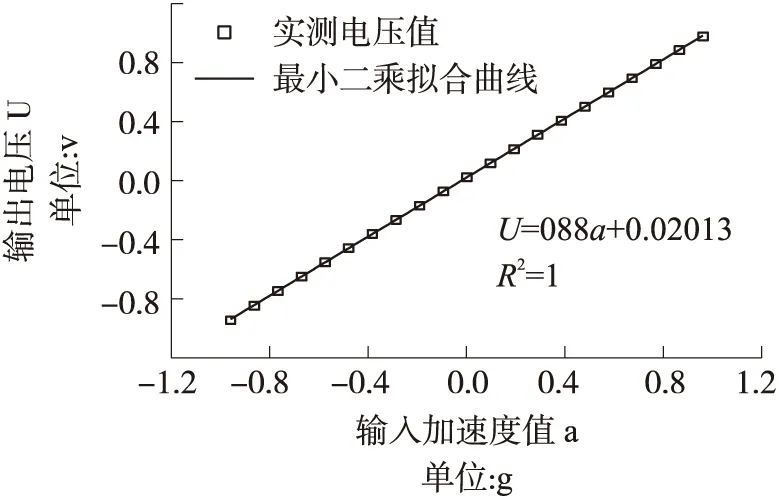
图9 精密滚转台加速度测量输出曲线
4 结束语
本文设计了一种差分电容硅微加速度计的闭环检测电路,理论设计和实验结果证明,采用基于调制解调方法的闭环检测方式可以有效提取加速度信号,屏蔽寄生电容,提高检测电路的辨识能力;解调过程中的微小相位差仅仅对解调效率有微小影响,进而对开环输出增益有影响,而不影响闭环输出;双路反馈静电力静电力平衡形成闭环回路,有效提高输出信号线性度。该电路形式结构简单,系统仿真和滚转实验证明该电路对差分电容硅微加速度计的检测行之有效,具有进一步的研究价值。
[1]Kempi,Volker. Inertial MEMS:Principles and Practices[M]. Cambridge University Press,2011:131-156.
[2]周智君,石云波,唐军,等. 一种大量程加速度传感器的性能测试[J]. 传感技术学报,2013,26(6):834-837.
[3]Wu Jiangfeng. Sensing and Control Electronics for Low-Mass Low-Capacitance MEMS Accelerometers[D]. Department of Electrical and Computer Engineering,Carnegie Mellon University,Spring 2002:26-30,55-59.
[4]陶呈瑶,邓康发.Σ-Δ微加速度计中基于脉宽调制的力反馈回路[J]. 传感技术学报,2013,26(12):1704-1709.
[5]张霞,胡世昌,朱辉. 差分电容电压转换电路噪声性能分析及测试[J]. 传感技术学报,2011,24(9):1301-1304.
[6]周晓奇. 电容式微机械加速度计处理电路研究[D]. 杭州:浙江大学,2008:10-18.
[7]黄廷昭,童成盛,万培元,等. 基于闭环加速度检测系统的MEMS加速度传感器模型[J]. 科技信息,2014(11):70-72.
[8]Mikail Yüceta,Mika Pulkkinen,Antti Kalanti,et al. A High-Resolution Accelerometer With Electrostatic Damping and Improved Supply Sensitivity[J]. IEEE Journal of Solid-State Circuits,2012,47(7):1721-1730.
[9]吴学忠,肖定邦,李圣怡. 电容式微加速度计的闭环检测技术研究[J]. 传感技术学报,2006,19(4):1098-1099,1156.
[10]Lang C,Tielert R. A Low Noise Accelerometer with Digital PID-Type Controller and Multibti Force Feedback[C]//IEEE International Solid-State Circuits Conference(ISSCC),1999:250-253.
[11]董景新. 微惯性仪表[M]. 北京:清华大学出版社,2003:23-26,66-76,101-108.
[12]Ye Zhenhua,Yang Haigang,Liu Fei,et al. Electro Mechanical Closed-Loop with High-QCapacitive Micro-Accelerometers and Pulse Width Modulation Force Feedback[C]//Proceedings of the PrimeAsia,2011,Macau,2011:49-52.
[13]林伟俊. 电容式微机械加速度传感器检测电路研究[D]. 杭州:浙江大学,2010:13-20.
[14]林伟俊,胡世昌,郑旭东,等. 电容式加速度计的数字化处理电路及其与模拟电路的比较[J]. 传感技术学报,2009,22(11):1564-1567.
[15]许乐. 高精度电容式微机械加速度计系统的研究与设计[D]. 杭州:浙江大学,2010.
Research of Detective Circuit for Differential Capacitive Silicon Micro Accelerometer*
WANGMeng,XIAOPeng,XULinpeng,WANGYuzhao,TENGLin*
(AVIC Xi’an Flight Automatic Control Research Institute,Xi’an 710065,China)
A close-loop detective circuit based on modulation and demodulation is introduced,for detection on micro differential capacitance of silicon micro accelerometer. The principal configuration and the approach are presented. A prepositioned capacitance-to-voltage circuit based on single carrier wave is analyzed,and the validity of the demodulation approach which is based on correlative chip is proved. The electrostatic rebalance circuit based on feedback circuits advances the linearity of the system. The Simulink model of the closed-loop system is established with the parameters of the silicon micro accelerometer and the circuits,the results show that the systems stable,and the scale factor is about 0.9 V/gn,with the bandwidth 700 Hz. The circuits presented in this paper are tested on a precision roller with a differential MEMS accelerometer. The test results show that the scale factor of the system is 0.88 V/gnand the measuring range of the accelerometer is ±13gn.
micro accelerometer;detective circuit;differential capacitance;modulation and demodulation
王 猛(1989-),男,河南商丘人,中国航空研究院618在读硕士研究生,研究方向为MEMS惯性传感器,yiwen111@126.com;

肖 鹏(1980-),男,陕西西安人,中航工业西安飞行自动控制研究所高级工程师,主要从事MEMS传感器技术研究,xoul2984@gmail.com;

滕 霖(1960-),男,辽宁辽阳人,1995年于西北工业大学获得工学博士学位,现为中航工业西安飞行自动控制研究所总工艺师,研究员,主要从事航空宇航制造工程、超精密加工等方面的研究,TL2253@facri.com。
项目来源:国际科技合作项目(2011DFA72370);惯性十二五预研项目
2014-12-15 修改日期:2015-01-21
C:7230
10.3969/j.issn.1004-1699.2015.03.009
V241.5;TP212
A
1004-1699(2015)03-0347-05
