起重机双马达同步控制策略分析
2015-05-08刘勇求
刘勇求
(广东科技学院,广东 东莞 523083)
0 引言
液压起升系统是起重机重要的组成部分,它的安全性、可靠性直接决定了整机的工作性能。为了保证起升安全,大型起重机常采用两个马达共同提升一个负载,这就要求两个马达的转速一致,或者转速差在一定的范围内。但由于泄漏,摩擦等因素的影响,常出现同步误差,使起重机的工作状态发生改变,容易引起安全事故。基于此,通过分析起重机起升系统动态特性,找出影响其同步的因素,并把模糊控制与传统PID控制相结合,提出一种模糊PID控制方法用于起重机起升系统。仿真及实验结果表明了该控制方案能提高起重机控制精度。
1 起重机起升系统动态特性分析
1.1 起升系统结构
本文所研究的起重机起升系统由两组独立泵控马达系统组成,以其中一个独立的系统为研究对象,结构主要由变量泵,变量马达、电磁换向阀,平衡阀等元件组成,如果1所示。
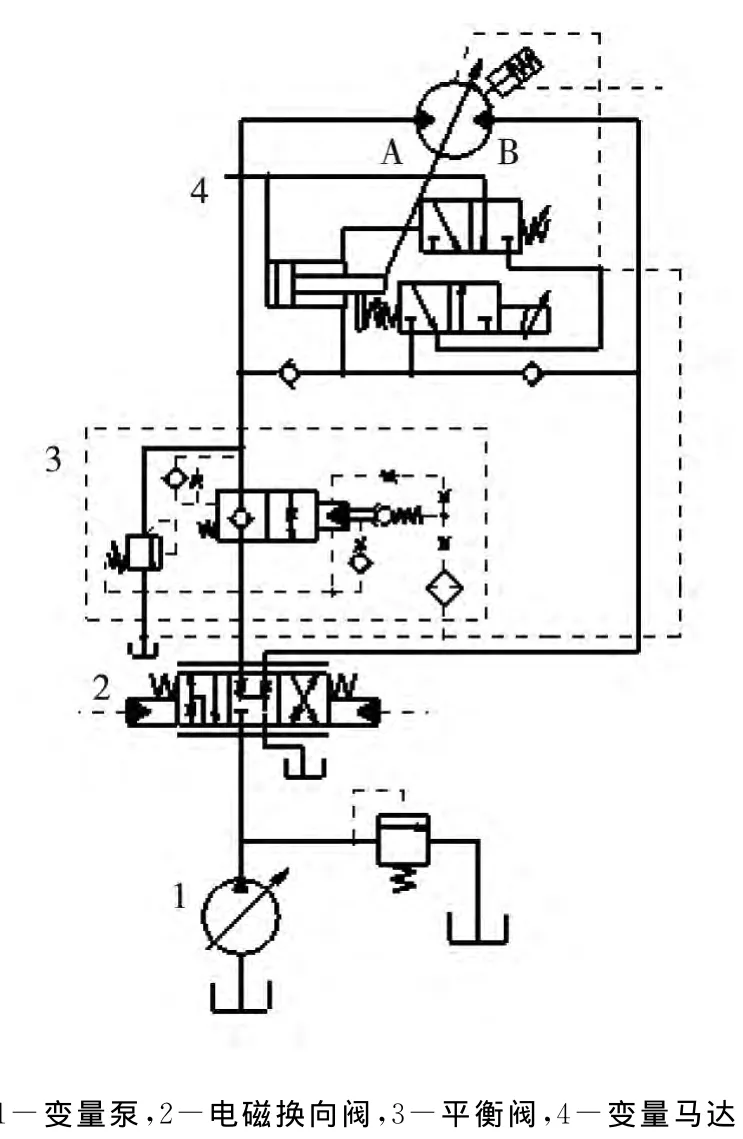
图1 起重机起升系统结构
1.2 起升系统的数学模型
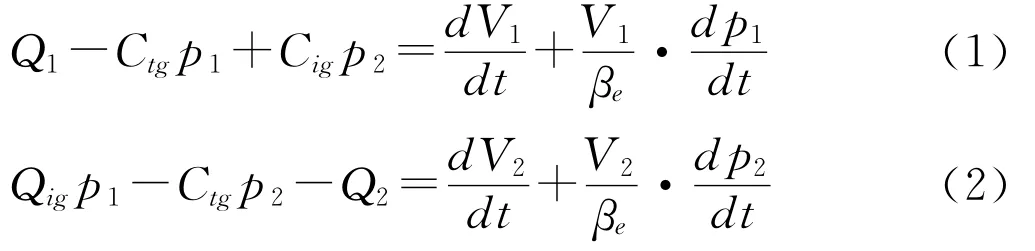
由流体力学可知,假设变量马达排量不变,此时若要实现马达速度同步,只需改变变量泵的排量即可,液压泵变量机构由比例阀和变量油缸组成,建立数学模型。
(1)液压缸的流量连续性方程:
式中:
V1—液压缸无杆腔容积;V2—液压缸y有杆腔容积;Cig—液压缸内泄漏系数;Ctg—液压缸内泄漏系数;Q1,Q2—液压缸进、回油腔流量;βe—液压油弹性模量。
(2)液压缸受力平衡方程:

式中:
m—活塞与负载的质量和;B—粘性阻尼系数;X—活塞位移;FL—负载力;K—弹簧刚度;A—活塞有效工作面积。
(3)阀芯动态平衡方程:

式中:
mν—阀芯质量;Ki—电流力增益;I—控制电流;Ky—位移力增益;Y—阀芯位移;Kν—弹簧刚度;Bν—为阻尼系数。
2 双马达同步控制技术研究
2.1 模糊PID控制
传统PID控制结构简单,易于实现,但是参数不能在线调整,所以应用范围受到一定限制。为了获得更好的控制效果,补偿同步系统因时变性和非线性带来的同步误差,在PID参数的整定中应用模糊推理。图2为模糊PID控制器结构。
模糊控制器的基本原理:是将输入的数字信号经过模糊化模块变成模糊量,送入含有模糊规则的模糊推理模块,经过近似推理得出结论—模糊集合,然后反模糊化化模块变成清晰量,再输入到下一级去调节被控对象。
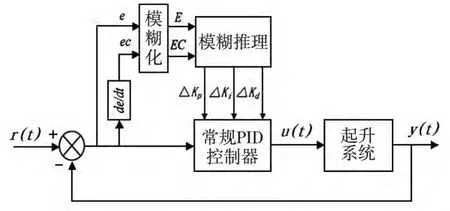
图2 模糊PID控制器结构
2.2 模糊控制规则
选取两个马达转速偏差e和偏差变化率ec为模糊控制器的输入变量,ΔKp,ΔPi,ΔPd为输出变量。在保证系统稳定的前提下,充分考虑系统的抗干扰能力和响应速度,其制定模糊控制规则如表1~3所示。
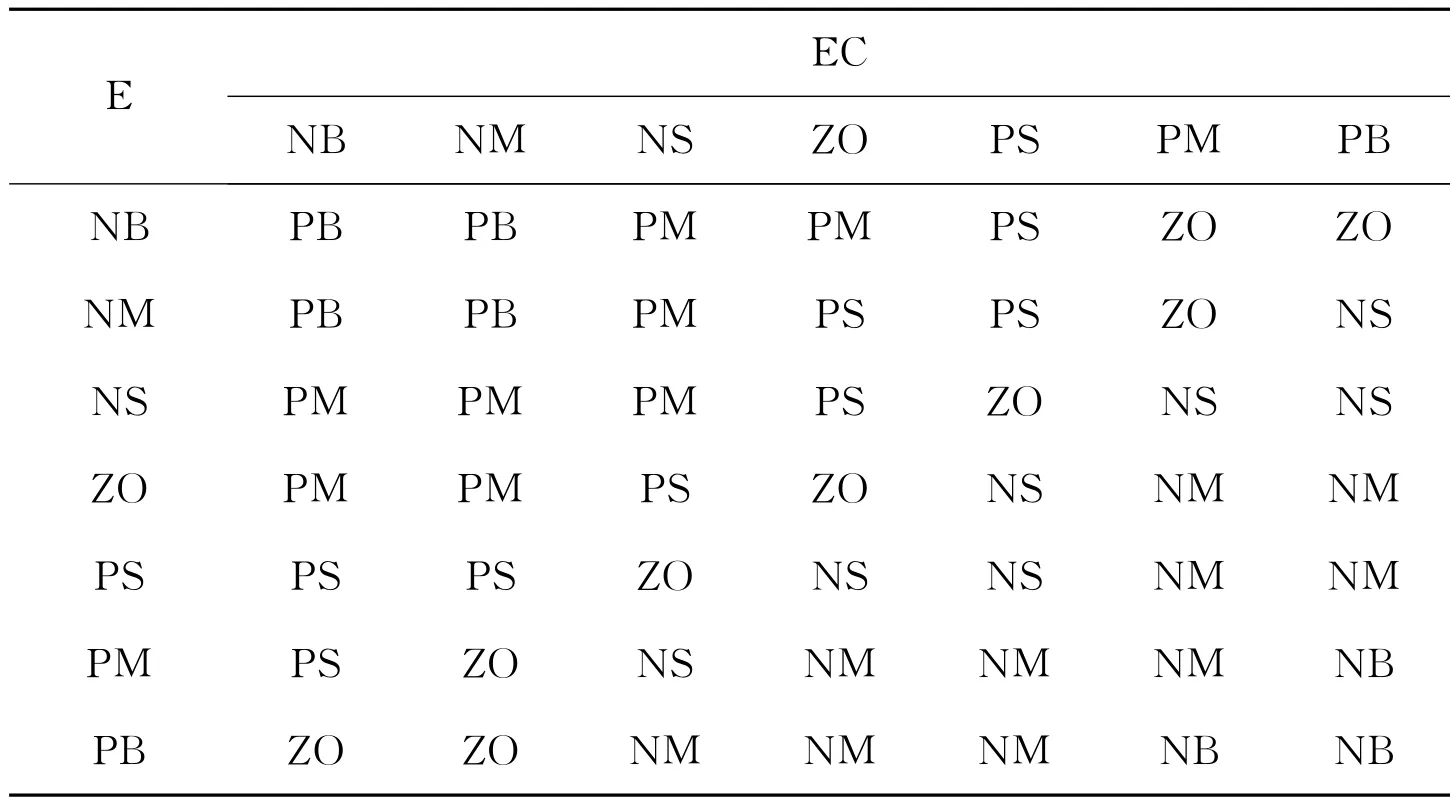
表1 模糊控制规则表
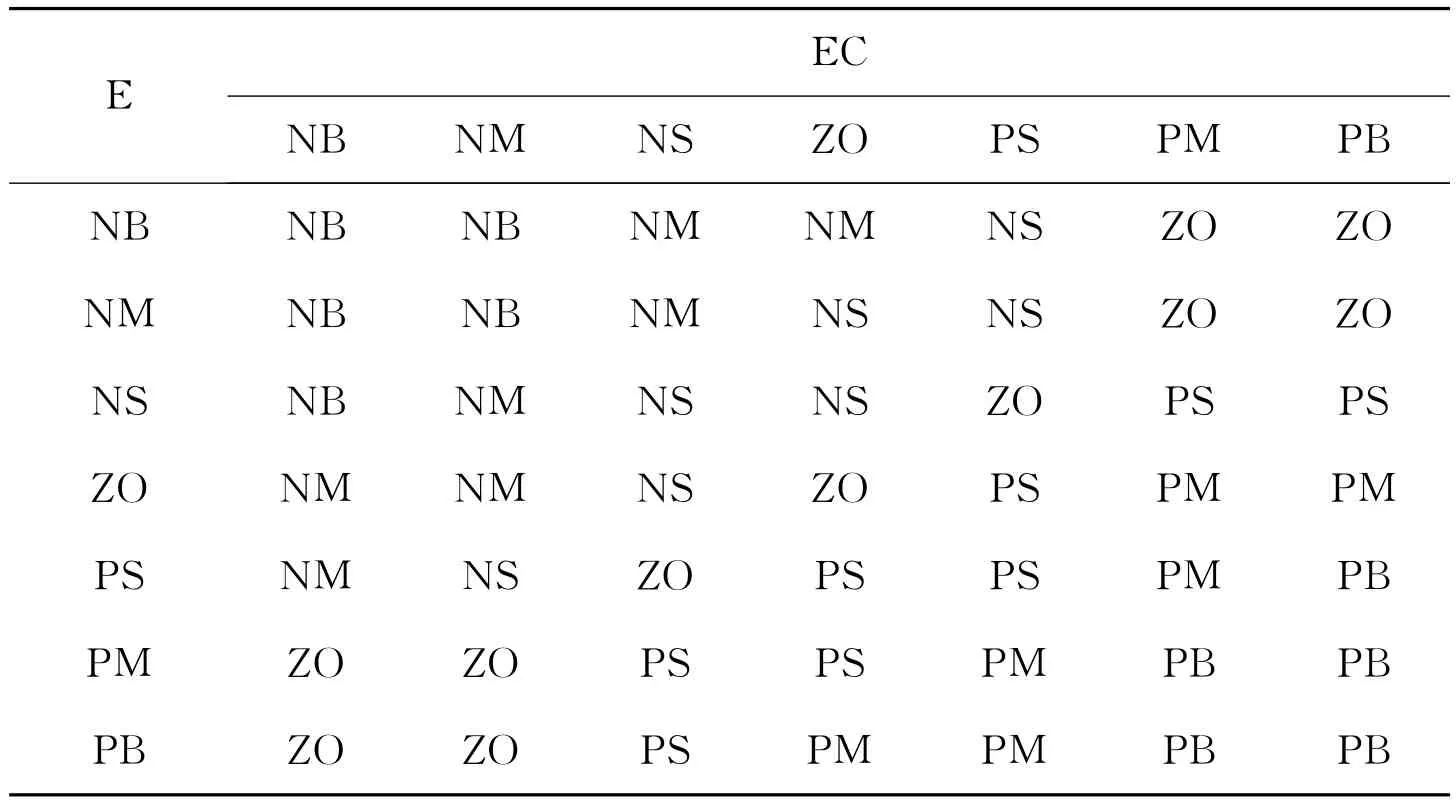
表2 Ki模糊控制规则表

表3 Kd模糊控制规则表
3 仿真分析
把模糊PID控制策略应用于双马达液压起升系统,并与传统PID控制相对比,进行MATLAB仿真。在仿真过程中,以两个马达的工作压力仿真目标,选取变量泵排量为135mL/r,发动机的转速1000r/min,吊重5000kg,结果如图3,图4所示
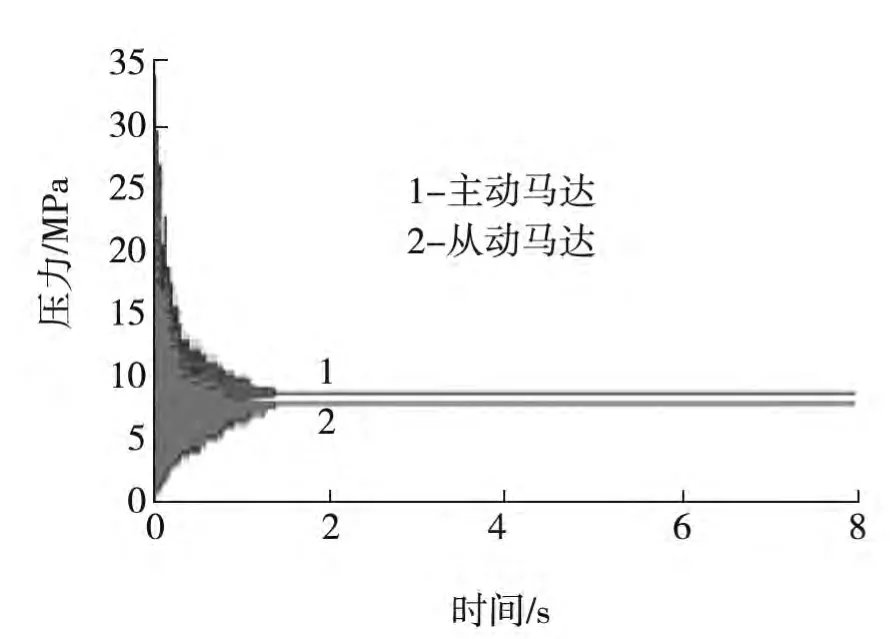
图3 传统PID控制仿真曲线
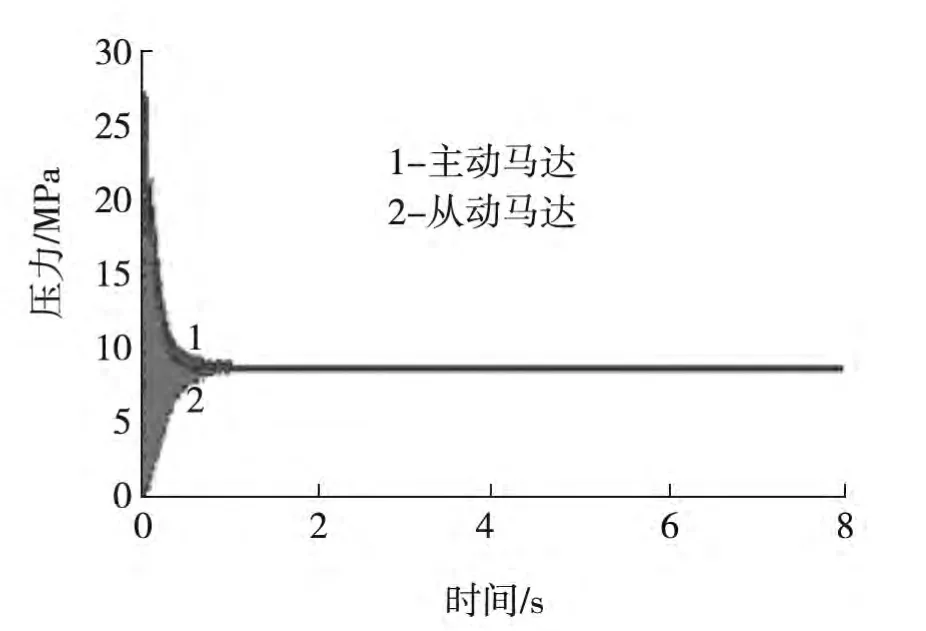
图4 模糊PID控制仿真曲线
从仿真结果可以看出,在同步控制过程中,两种控制策略控制效果都较为理想。与传统PID控制策略相比,模糊PID控制策略具有更高的控制精度和响应速度快等优点。
4 实验研究
以某大型起重机为研究对象,对控制方法的实用性仿真分析的正确性进行验证,采用进行实验参数与仿真相同,其实验结果如图5,图6所示。
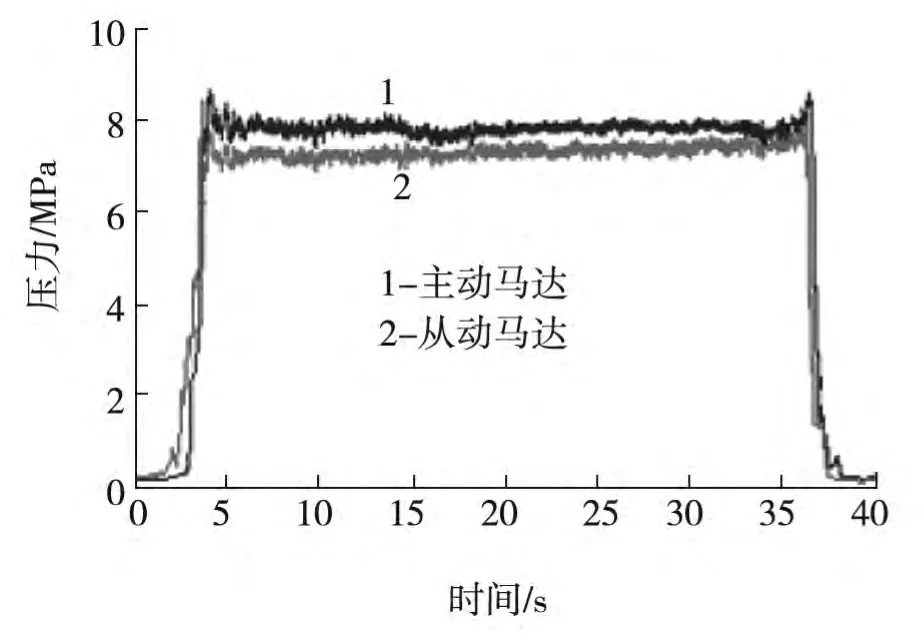
图5 传统PID控制实验曲线
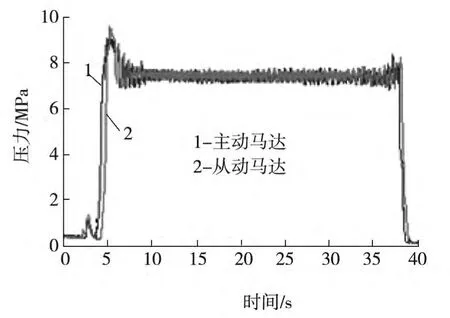
图6模糊PID控制实验曲线
5 结论
通过对双马达液压起升系统的动态特性进行分析,找出各参数之间的关系,为控制变量的选取提供依据。把模糊控制与传统PID相结合,提出模糊PID控制策略,从而克服了传统PID控制策略不能在线整定的缺点。仿真和实验结果表明,该方法具有较好的动态响应特性和稳态特性,控制精度高,达到设计预期。
[1] 温有东.电动汽车用永磁同步电机的研究 [D].黑龙江:哈尔滨工业大学,2012.
[2] 张峰.纯电动汽车用永磁同步电机控制器的研究 [D].江西:南昌大学,2013.
[3] 佟诚德.电动车用复合结构永磁同步电机控制系统的研究 [D].黑龙江:哈尔滨工业大学,2009.
[4] 吴世华电动汽车用永磁同步电机设计方法及相关问题的研究 [D].黑龙江:哈尔滨工业大学,2010.
[5] 张达伦,桥式起重机的选型策略分析 [N].辽宁工程技术大学学报,2007.
