基于测量机器人的高支模变形监测研究与应用
2015-05-08卢松耀梁龙昌何广静
卢松耀,梁龙昌,何广静
(1.广东有色工程勘察设计院,广东 广州 510080; 2.中山大学地理科学与规划学院,广东 广州 510275)
基于测量机器人的高支模变形监测研究与应用
卢松耀1,梁龙昌1,何广静2
(1.广东有色工程勘察设计院,广东 广州 510080; 2.中山大学地理科学与规划学院,广东 广州 510275)
在高支模变形监测中,针对高支模结构复杂、事故突发等特点,提出了以高精密的测量机器人为主体的测量设备,通过自由设站混合基点网进行了高支模变形监测,为提高高支模变形预警自动化与智能化提供了新的思路。
高支模;测量机器人;基准点;变形监测;变形分析
一、引 言
高支撑模板系统简称为高支模,是指水平混凝土构件模板支撑系统高度超过8 m,或跨度超过18 m,施工总荷载大于10 kN/m2的模板及其支撑系统[1]。模板支撑系统连接构件多,结构复杂,在工程施工期间高支模受力失衡坍塌的现象频发[2],而且事故通常在工程施工过程中突然发生,从而造成群死群伤的恶性伤亡事故[3],具有事故突发性和高危性。为确保支撑模板系统稳固和安全,必须对支撑模板系统进行实时变形监测。
以往高支模监测采用精密水准仪测量沉降、全站仪(经纬仪)测量平面位移,费时费力且精度不高,监测人员和仪器在高支模支架下作业,安全无法保障。为提高测量的精度和效率,保障安全施工,本文通过具体工程实例阐述采用徕卡测量机器人进行高支模的沉降和平面位移测量的新测量手段,并取得了显著成效。
二、高支模变形监测特点
高支模结构复杂,各种连接构件多,在布设变形监测点时要考虑测量机器人的通视条件。高支模坍塌事故具有突发性,在工程连续施工过程中,需要对高支模进行持续动态监测,及时获取高支模变形数据,指导高支模工程安全施工。高支模工程环境复杂,在施工工地上有很多施工车辆和机械设备。在变形监测中,要顾及监测人员人身安全和施工对变形监测系统的影响。
三、变形监测技术
1.自由设站混合基点网
变形监测需建立多周期变形观测的统一、可靠基准,对基准点的稳定性和可靠性进行检核、复测。利用测量机器人进行变形监测,机器人(测站)的坐标通过后方交会基准点实时改正得到,同时通过测量机器人可以获得监测点的三维空间坐标。变形监测一般需要建立监测基准,以及布设测站点和监测点,涉及基准点、工作基点和监测点的布设[4], 根据高支模变形监测的特性,本文采用了一种混合基准点网布设方法[5](如图1所示)。在变形区外稳固、不易破坏的地方布设基准点(图1中J1—J4)。基准点上不设站,只安装强制对中棱镜。工作基点(图1中GJ1-GJ3)设在便于监测点进行观测的任意合适的位置,称为自由设站。但一经选点,需要设立稳固的观测设施,如强制对中装置。
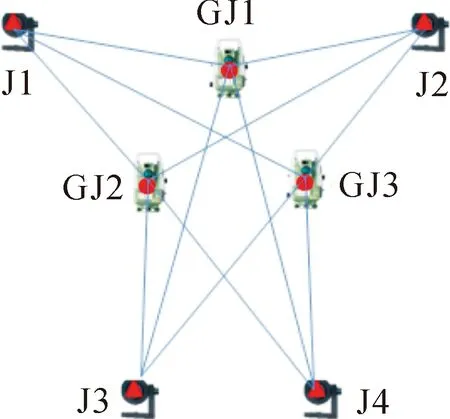
图1 混合基点网示意图
2.单点极坐标法
单点极坐标法是测量机器人测量目标点的重要方法。如图2所示,需要测定监测点到测站的距离,测量监测点测站连线与两个已知点连线的夹角。设全站仪在B点观测值分别为:水平角α、垂直角β、斜距S,则C点坐标为
式中,αBC=αBA+α。
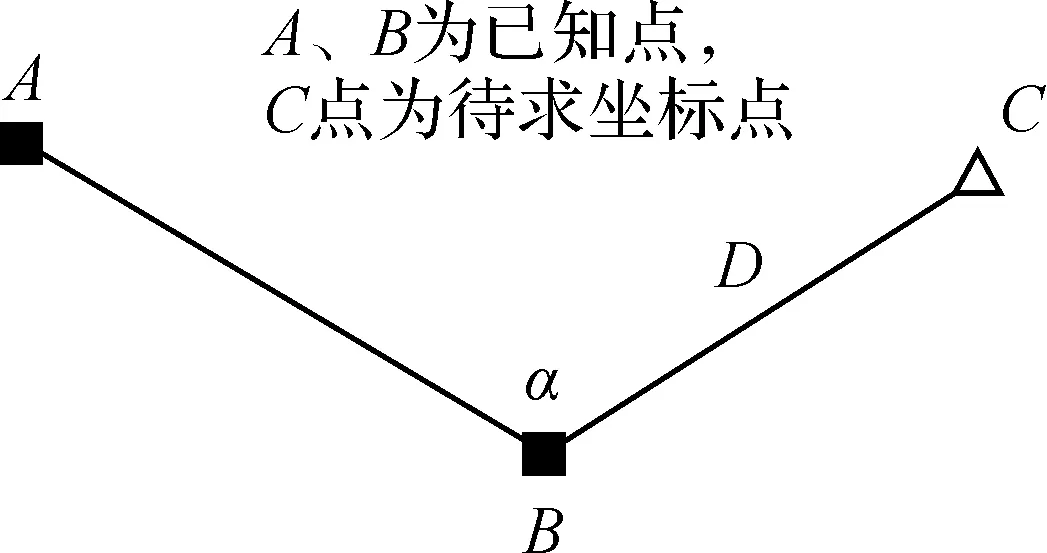
图2 极坐标法示意图
极坐标法简单实用,但需要作定向点角度距离检查,并通过重复观测来提高监测点成果的可靠性。
3.测量机器人及其自动化监测技术
瑞士Leica生产的精密测量机器人综合长距离的自动精确照准、小视场、数字影像采集等先进技术,具有精度高、速度快、测量全自动化的特点,可以全天候无间断工作,即使被监测物发生最细微的结构变形,也能及时发现[6],因此选择该仪器为主要的变形监测设备。
武汉大学测绘学院针对常见的工程变形监测应用,基于Leica测量机器人SDK开发了一套测量机器人变形监测自动化系统软件[7]。本文采用该系统进行高支模变形监测的研究与应用,以提高高支模变形监测的自动化、智能化水平。
变形监测自动化系统软件功能如图3所示。文件管理模块负责监测数据的文件管理;初始化设置可以进行气象改正设置;学习测量可以进行测量目标点学习;自动测量中如果观测出现意外错误,如误差超限、目标被遮挡等则系统自动报警,并进行相应的延迟处理或重复执行等操作。在所有的测量过程都顺利完成之后,则通过相应的指令将数据读取到计算机中,同时对原始观测数据进行实时改正,得到差分处理后的数据结果。
四、高支模变形监测系统
高支模变形监测系统的结构组成如图4所示。图中测量机器人采用Leica生产的TCA1800全站仪,并配备武汉大学开发的自动变形监测软件,提高了高支模变形监测的自动化水平。基准点不设站但强制对中安置徕卡圆棱镜,监测点强制对中装置棱镜,工作基准点为带有强制对中装置的观测墩,采用自由设站、极坐标和边角交会技术方法,测定基准网点和各变形点的三维坐标。由测量机器人、计算机及通信电缆建立基站,测量人员可以在离高支模较远的安全地带进行变形监测。
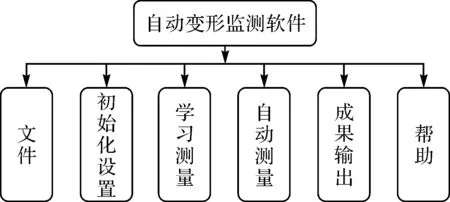
图3 自动变形监测软件
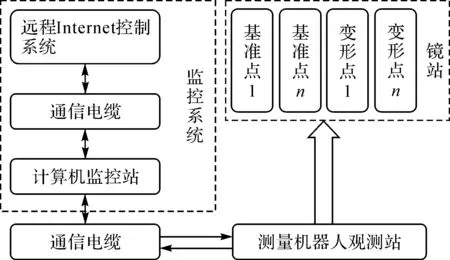
图4 高支模变形监测系统组成结构
本文以永龙隧道及道路工程桥梁高支模变形监测为例,监测网的布设如图5所示,高支模12号墩上盖梁横断面的监测点布设如图6所示。基准网布设在监测点的同一侧。在工作基点上架设测量机器人,需要观测的监测点和基准点上安装棱镜和强制对中装置,其中基准点布设在远离变形区的稳固区。监测系统布置完成后,设置测量机器人对基准点和监测点进行持续周期性自动化观测。通过对基准点和变形点的持续的周期性观测结果进行比较、实时改正,从而得出变形点的三维变形量,并进行安全和稳定性等分析,得出变形体的变形趋势。
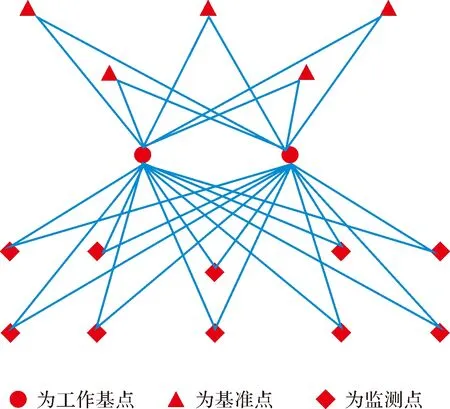
图5 高支模变形监测网
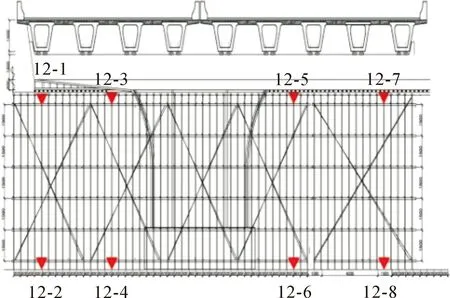
图6 盖梁横断面监测点布设图
为了使监测成果能更好地指示变形方向,以平行于监测断面为Y坐标轴、垂直于监测断面方向为X坐标轴建立坐标系统。
五、变形监测结果与分析
本文高支模变形监测中,业主和设计方根据相关规范和规程,对高支模监测提出变形预警值、控制值和精度要求等:
1) 监测点水平位移及沉降变形量每期不能超过2.0mm。
2) 监测点水平位移预警值为10mm、控制值为15mm。
3) 监测点沉降预警值为8mm、控制值为10mm。
4) 监测点相对于工作基准点的监测精度要求为1mm。
5) 根据变形情况,观测频率为20~30min监测一次。
本文高支模变形监测基于测量机器人配合武汉大学开发的自动监测系统软件,可以大大提高监测效率和监测精度,每期监测时间不到4min。应工程施工要求,在施工过程中持续监测,时间一般在20h左右,每隔20~30min进行一次周期监测并提交监测报表。
高支模变形监测每期观测均进行基准点网基准点稳定性检验[8]和平差、监测点变形分析。在进行基准网点数据处理时,采用组合后验方差法进行基准点的稳定性校验,只取用稳定的基准点作为参考。内业数据处理使用科傻网平差系统和测量机器人变形监测内业软件系统,可方便地得到基准网点和监测点的坐标[9]。对数据层进行叠加分析得出各期变形量和累计变形量,还可以得到每个点上直观的二维或三维图。
监测结果分析以12号墩的同一断面上的3对监测点(如图6所示)为例。监测点在Z方向(沉降)的变形过程曲线如图7所示,从第1期到第4期其变形都很小,由于浇注施工原因,荷载逐渐增加,沉降量增大,在Z方向累计变形最大值为-8mm,有一种趋势性的变形但变形缓慢,变形量在可控范围,随着时间的推进,逐渐放慢,浇注施工对支模系统安全不造成影响。从曲线图还可看出,每一对监测点变形量非常接近,且趋势一致,其沉降量主要是地基下沉引起。
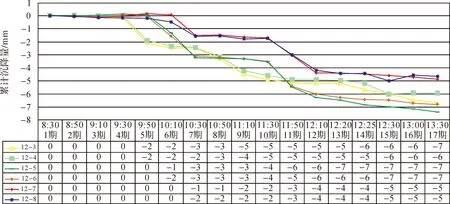
图7 12号墩变形监测Z方向变形曲线
同样,可绘制X、Y方向变形过程曲线(DX值“+”表示垂直于桥墩盖梁向北位移)。由支架顶部监测点12-3、12-5、12-7 X方向变形过程曲线看,支撑的支架水平方向上的变形随浇注施工,因荷载增加有缓慢上升,监测点变形方向无规律,变形量均较小,最大1.7mm,通过高精度测量机器人的密集周期监测,监测出了这种微小的变化。
根据各点的周期监测成果,可以进行建模分析和变形预报,通过变形过程曲线能清楚地看出变形情况和趋势,再根据设定的预警值,即可进行预警预报。每周期监测完成均生成该周期监测成果表,包括变形量、累计变形量和简单的分析报告。每次浇注结束后第3天,用监测小结向监理单位、建设单位等提供本次各期的变形量、累计变形量、变化曲线图和变形分析报告。所有监测完成后,提交有高支模变形监测技术报告、原始观测成果和监测点平面位置示意图,以及各监测点的X、Y、Z坐标变形过程曲线和变形分析结果。
六、结束语
利用测量机器人配合自动化监测软件进行高支模变形监测,自动化程度得到很大提高,解决了高支模监测中监测时间长、周期短、环境差、危险性大、实时性强等关键技术。建立混合基点网,利用组合后验方差进行基准点稳定性分析,测量机器人自由设站采用极坐标法进行自动化监测,可以快速建立监测预警系统,为高支模浇筑施工提供实时变形监测数据,及时指示变形部位以供排查隐患,确保施工安全。综合分析,本文采用的高支模变形监测技术保障了高支模浇注施工的安全,具有先进性、实用性、有效性和推广价值。
[1] 张果.浅谈高支模的施工和安全[J].山西建筑,2008,34(16):157-157.
[2] 陈伟.扣件式钢管高支模体系的防坍塌研究[D].武汉:华中科技大学,2011.
[3] 胡长明,曾凡奎.构造因素对高支模稳定承载力的影响[J].华中科技大学学报:城市科学版,2008,25(4):57-60.
[4] 张正禄.工程测量学[M].武汉:武汉大学出版社,2014.
[5] 梁龙昌,卢松耀,卢凌燕.典型工程变形监测的一种新方法及应用研究[J].测绘科学技术,2014(8):8-10.
[6] 徐忠阳.全站仪原理与应用[M].北京:解放军出版社,2003.
[7] 梅文胜,张正禄.测量机器人变形监测软件系统研究[J].武汉大学学报:信息科学版,2002,27(2):165-171.
[8] 张正禄,沈飞飞,孔宁,等.地铁隧道变形监测基准网点确定的一种方法[J].测绘科学,2011,36(4):98-99.
[9] 张正禄,罗年学,郭际明,等.COSA_CODAPS及在精密控制测量数据处理中的应用[J].测绘信息与工程, 2010(2):52-54.
Design and Applications of Deformation Monitoring System for High Form-work Based on Georobot
LU Songyao,LIANG Longchang,HE Guangjing
卢松耀,梁龙昌,何广静.基于测量机器人的高支模变形监测研究与应用[J].测绘通报,2015(7):85-88.
10.13474/j.cnki.11-2246.2015.0219
2015-03-02
卢松耀(1967—),男,高级工程师,主要研究方向为工程变形监测、控制测量、地形测量等。E-mail:lu346@163.com
P258
:B
:0494-0911(2015)07-0085-04
