GNSS RTK技术下超高层结构的动态变形监测
2015-05-08熊春宝田力耘叶作安熊指南
熊春宝,田力耘,叶作安,熊指南,白 鋆
(1.天津大学建筑工程学院,天津 300072; 2.天津市陆海测绘有限公司,天津 300191;3.交通运输部天津水运工程科学研究院,天津 300456)
GNSS RTK技术下超高层结构的动态变形监测
熊春宝1,田力耘1,叶作安2,熊指南2,白 鋆3
(1.天津大学建筑工程学院,天津 300072; 2.天津市陆海测绘有限公司,天津 300191;3.交通运输部天津水运工程科学研究院,天津 300456)
以天津电视塔为监测对象,设计了基于GNSS RTK技术的超高层结构动态变形监测系统,并进行了强风下的现场试验。试验中同时采用双星座组合导航系统和三星座组合导航系统进行监测,并对监测数据进行了对比。采用Kalman滤波方法,使用Matlab软件编制的程序对监测数据进行处理分析,得到测点的振动轨迹及结构的主振方向和振动曲线。结果表明,GNSS RTK技术结合Kalman滤波用于超高层动态变形监测及其数据处理分析是可行的;由于北斗导航系统的应用,三星座组合导航系统可见卫星数目大大增加,坐标中误差及PDOP值也相应减小,动态变形监测的精度和稳定性也得到了大大提高。
GNSS RTK技术;动态变形监测;Kalman滤波
一、引 言
同一般类型的建筑相比,超高层结构在风荷载、日照作用、地震等因素的影响下会产生更为明显的动态变形[1-3]。随着卫星导航数据解算中整周模糊度问题的解决、GPS RTK技术及动态变形监测中Kalman滤波方法的应用,长期的实时动态监测得以迅速发展[4-7]。然而,单一的星座系统在连续性、精度、效率、可用性和可靠性等各个方面都存在着一定的局限性[7-8]。目前,中国的北斗导航系统(BDS)已经覆盖东亚大部分地区[9],人们将会越来越多地享受到多星座导航系统带来的更优质、更可靠的服务。本文以天津广播电视塔为监测对象,同时采用三星座和双星座GNSS RTK系统进行了超高层建筑物的动态变形监测试验,将两种系统的中误差和PDOP值进行了对比,并采用Kalman滤波方法对检测数据进行处理,得到了监测点所在部位的结构振动轨迹、主振方向及其振动曲线。
二、三星座组合GNSS-RTK工作原理
目前世界上建成并且已经得到广泛应用的全球卫星导航系统主要有美国的GPS系统和俄罗斯的GLONASS系统,其他导航系统还包括正在建设中的欧洲Galileo系统及覆盖东亚大部分地区的我国BDS系统。本文中所采用的组合GNSS RTK系统可以同时接收GPS、GLONASS、BDS三星座系统的卫星信号,大大提高可见卫星的数目,组成更好的卫星几何分布,并且多星座组合使得星座的冗余度提高,也能够保证定位精度的可靠性。多星座组合导航定位原理和GPS定位原理[10]基本相同。
设将GNSS接收机的天线安置在某个测点上,接收机接收到GNSS卫星的信号以及信号从卫星到达测点的时间延迟t,由此可以算得卫星与测点之间的直线距离
d=ct
(1)
式中,c为信号的传播速度。d与卫星坐标(xs,ys,zs)和测点坐标(x,y,z)之间的关系为
d=[(xs-x)2+(ys-y)2+(zs-z)2]1/2
(2)
卫星的瞬时坐标(xs,ys,zs)可根据接收的卫星导航电文求得,故在上式中仅有3个未知数x、y、z。如果接收机同时接收3颗或3颗以上卫星的信号及时间延迟t,就可以列出3个或3个以上方程,从理论上讲,这样就可以解算出测点的三维坐标(x,y,z)。
在离测点一定距离范围内,将另一台GNSS接收机安置在一已知坐标的基准点上,通过将基准点上接收机测得的坐标与已知坐标相比,解算出卫星和接收机的钟差、电离层和对流层的折射误差等。通过电台或网络数据传输技术,将这些公共误差实时传送给测点上的接收机,实时消除在测点上测得的坐标值中的误差,实现高精度的实时动态相对定位。
在多星座组合导航定位系统中,需要同时接收多个星座系统的导航电文信息。由于各系统之间存在时间偏差,且坐标系不同、接收机对不同系统信号的时延也不同,因此在多星座组合导航定位系统中需要考虑时空统一问题,进而进行组合导航解算,其基本原理如图1所示。
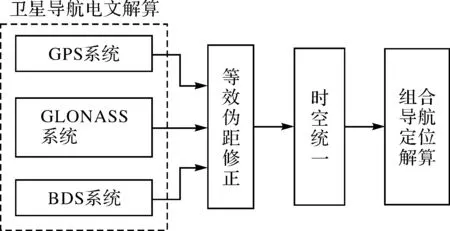
图1 三星座组合导航系统定位解算原理
三、监测数据Kalman滤波[6]
GNSS RTK系统动态变形监测信号包含各种频率成分,可以通过小波分析提取低频段的有效信息来消除干扰,对GNSS系统监测数据进行预处理。对于经小波预处理后遗留的不确定性噪声等,再运用Kalman滤波方法进行二次信号处理,以提高变形分析的精度。Kalman滤波器的方程可分为两类,即时间更新方程和量测更新方程,如图2所示。
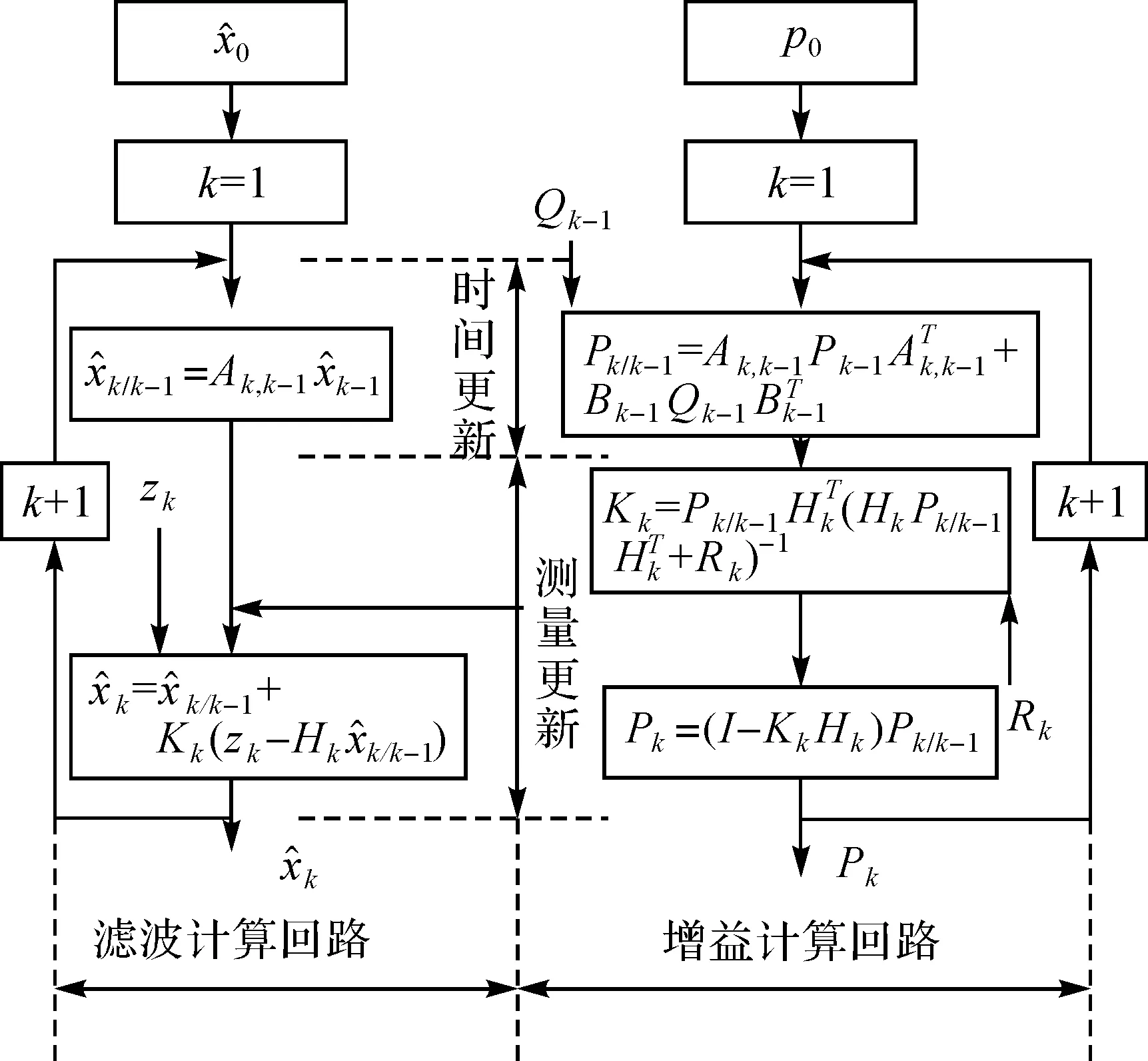
图2 Kalman滤波基本方程
四、GNSS RTK动态变形监测试验
1.工程简介
天津广播电视塔集旅游观光、餐饮、娱乐、广播电视等多项功能于一体,高415 m,最高处的观景平台为270 m(本文中移动站所处位置),于1991年建成,占地300亩。按结构和使用功能,把整个塔体划分成塔基、塔座、塔身、塔楼和桅杆天线5大部分。结构设计按地震烈度9度抗震设防,设计为钢筋混凝土筒中筒结构。塔楼设在242~278 m,共7层,分别为微波层、观景层、旋转餐厅、发射层(两层)、高空配电层和综合层。
2.试验仪器的选用及其相关性能
(1) GNSS RTK定位仪
本试验中采用的GNSS RTK定位仪是中海达的3套H32型三星座系统定位仪和1套V8型双星座系统定位仪,它们均由基准站、移动站和电台组成。3套三星座系统的定位仪共用一个基准站,移动站均配置有记录点位信息的iHand18G手簿。三星座系统能够同时跟踪接收GPS、GLONASS和BDS的卫星信号。
由双星(GPS+GLONASS)到三星,不仅接收卫星的数量增加了,其功能也提升了很多。三星系统既可以使用由电信运营商所提供的成熟网络数据传输技术,也可以使用传统的UHF数据链技术,且两种数据传输模式可自由切换。其中GSM数据传输技术不受作业距离限制,特别适合城区、山区等传统电台信号阻挡严重的复杂地区作业,抗干扰能力强;而外挂电台的配置也能使得UHF数据传输实现超长距离的目标。数据采集保存在与移动站通过蓝牙无线连接的iHand18G手簿中。
(2) 风向风速仪
风向风速仪为三杯式轻风表,测量部分采用了单片机技术,可以同时测量瞬时风速、瞬时风级、平均风速、平均风级等参数。本试验中该仪器主要用途为测平均风速及实时风速风向。
3.测量仪器布置及采样频率的选取
在天津广播电视塔270 m高的观景平台的东、西、南、北4个方向布置移动站,分别定义为E、W、S、N 4个监测点,并由定制的钢箍固定在铁架上。其中在东、南、北3个方向布置三星座GNSS RTK系统的移动站,在距离基准站最近的西方向布置双星座GNSS RTK系统的移动站。在距天津广播电视塔约100 m远的开阔地处布置基准站,两台基准站固定在三脚架上,电台的天线固定在配套的支架上。在距离基站约10 m处的地方设置检测点,每次数据采集前都要对4台移动站的测量精度进行验证。风向风速仪的布置根据试验当天具体的风向来确定,确保仪器能放置在迎风面方向(如图3所示)。
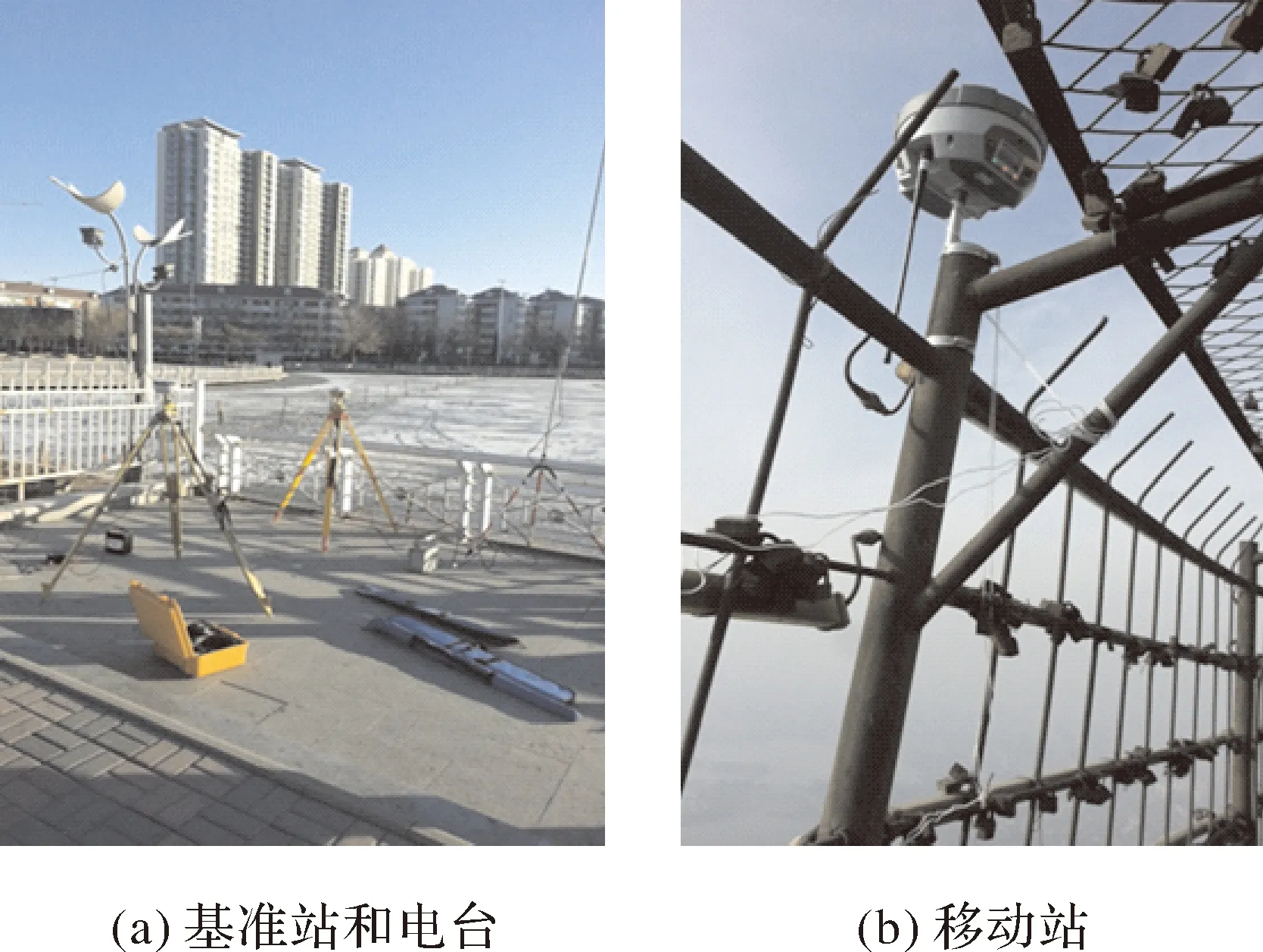
图3 基准站、电台及移动站设置图
根据奈奎斯特采样定理,采样频率应为待测信号中最高频率的2倍以上。本试验中建筑物结构振动分析时可简化为单自由度体系, 根据天塔振动分
析的资料,其振动频率小于0.2 Hz,因此本试验中GNSS RTK系统的数据采样频率设为1 Hz,完全符合采样密度要求。
五、监测结果及数据分析
1.多星座GNSS RTK系统监测结果比较
试验于2013年12月26日上午进行,当日天津气温为-7℃~1℃,风况为西北风5~6级。试验中实时采集的数据储存在系统的手簿中,采用中海达公司配置的数据处理软件将数据导入笔记本电脑并转存为XLS格式文件。随机选取E、W两监测点在某一相同10 s时间段内的监测数据进行比对,比对结果分别列在表1和表2中(由于S、N点与E点均为三星座系统,其数据相近,在此不单列出)。
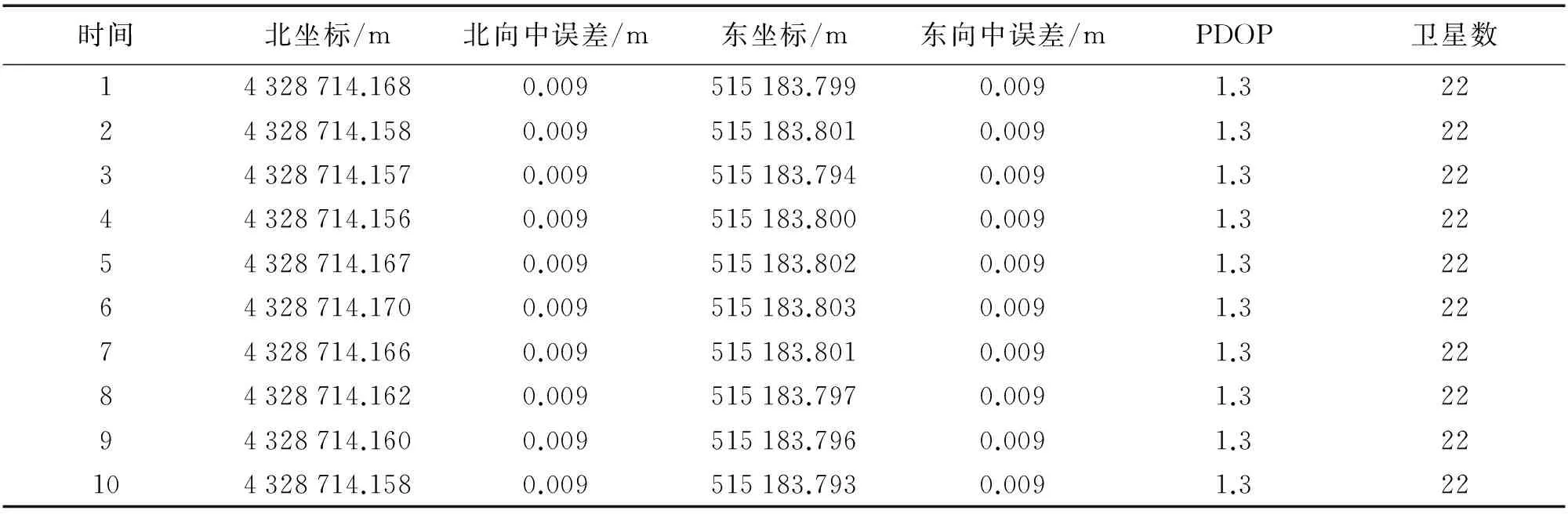
表1 随机选取时段内GNSS-RTK在E点(三星座系统)的监测数据及误差
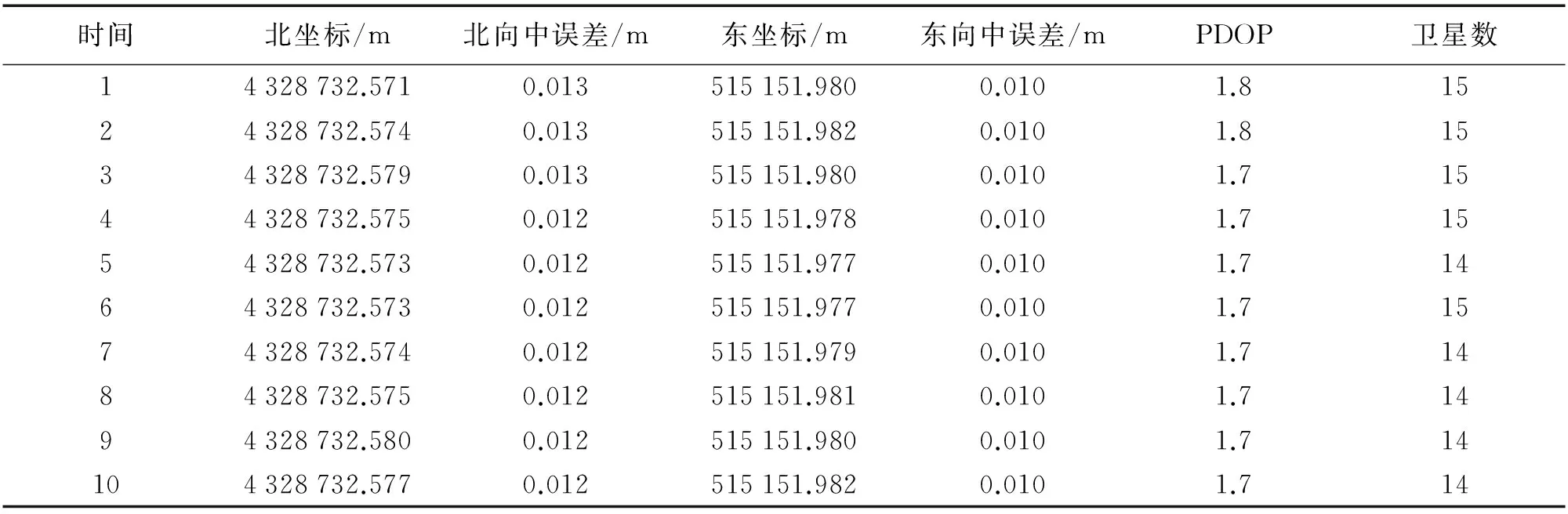
表2 随机选取时段内GNSS-RTK在W点(双星座系统)的监测数据及误差
通过表1和表2中随机选取的时间段内两种系统在中误差、PDOP值及卫星数的对比可知,三星座系统两个轴向的中误差及PDOP值比双星座系统的小,而其卫星数比双星座系统的要多。事实上,若从这两种系统关于上述3个方面的平均水平对比来看,也有类似的结论(见表3)。
2.测点振动轨迹
根据天津广播电视塔管理处所提供的统计资料,估算得知其振动周期为6.3 s,本试验中采样频率为1 Hz,即一个振动周期之内包含6个监测数据点。在风荷载的作用下,结构会形成近似椭圆状的运动轨迹;因此分别在E、S、W、N这4个测点上各自随机选取6个监测数据点,采用基于最小二乘法编制的Matlab程序进行椭圆拟合,得到E、S、W、N测点在该振动周期之内的振动轨迹,实际和拟合振动轨迹如图4所示。通过对各测点振动轨迹倾角的迭代计算得到结构的主振方向为北偏西21°42′36″。
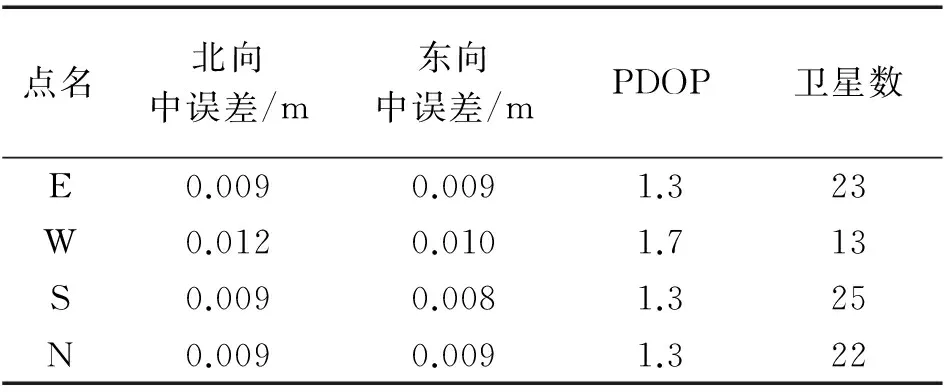
表3 4个监测点监测数据均值及误差均值

图4 测点一个振动周期内的振动轨迹
3.结构振动曲线
用Matlab自编程序,经Kalman滤波后得到主振方向的振动时程曲线,如图5所示。曲线所对应的这段时间内,根据风速风向仪的测量记录,风向稳定为西北风,平均风速为8.8 m/s,最大风速为11.2 m/s。从图5中可以看到,结构在风荷载下基本上作不规则的弦函数振动,沿主振方向最大位移为2.24 cm(因所选试验结构天塔的结构形式对称,所以其也是结构的最大位移)。
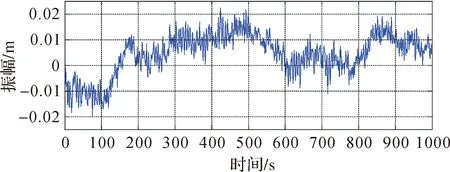
图5 天津广播电视塔在主振方向的振动曲线
六、结 论
1) 三星座组合GNSS RTK系统可以同时接收GPS、GLONASS、BDS三星座的卫星信号,大大增加了可见卫星的数目,组成了更好的卫星几何分布,降低了精度稀释因子,为定位精度的提高提供了可能。三星座系统组合定位使得星座的冗余度得以提高,同时也增强了定位精度的可靠性。
2) 通过实际超高层动态变形监测试验,特别是试验中双星座和三星座GNSS RTK系统的对比,可以看出北斗系统在提升监测系统的连续性、精度、效率、可用性和可靠性等各个方面都起到了十分重要的作用。可以预见的是,随着我国北斗系统的继续发展与完善,GNSS RTK技术必将会有更进一步的提升。
3) 采用Kalman滤波方法,使用Matlab软件编制的程序处理分析动态变形的监测数据,得到监测点的振动轨迹、结构的主振方向及其振动曲线,验证了GNSS RTK技术结合Kalman滤波在超高层动态变形监测及其数据处理分析中的可行性。随着相应软件的发展及编程水平的提高,其实用性也将更为突显。
[1] 范峰, 王化杰, 金晓飞, 等.超高层施工监测系统的研发与应用[J].建筑结构学报, 2011, 32(7):50-59.
[2] 熊海贝, 张俊杰.超高层结构健康监测系统概述[J].结构工程师, 2010, 26(1):144-150.
[3] 董志君, 李筱毅, 阎培渝, 等.非荷载因素对超高层结构变形的影响研究[J].工程力学, 2013, 30(S0):165-168.
[4] 于兴旺.多频GNSS精密定位理论与方法研究[D].武汉:武汉大学, 2011.
[5] 伊廷华, 李宏男.结构健康监测GPS监测技术[M].北京:中国建筑工业出版社, 2009:230-238.
[6] 付梦印, 邓志红, 闫莉萍.Kalman滤波理论及其在导航系统中的应用[M].2版.北京:科学出版社, 2010:8-10.
[7] GLEASON S, GEBRE-EGZIABHER D.GNSS Applications and Methods[M].[S.l.]: Artech House, 2009.
[8] 秘金钟.GNSS完备性监测方法、技术与应用[D].武汉:武汉大学, 2010.
[9] 高星伟,过静珺,程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报, 2012, 41(5):743-748.
[10] 熊春宝, 伊晓东.测量学[M].2版.天津:天津大学出版社, 2010:66-67.
Dynamic Deformation Monitoring of Super High-rise Building Based on GNSS RTK Technology
XIONG Chunbao,TIAN Liyun,YE Zuoan,XIONG Zhinan,BAI Yun
熊春宝,田力耘,叶作安,等.GNSS RTK技术下超高层结构的动态变形监测[J].测绘通报,2015(7):14-17.
10.13474/j.cnki.11-2246.2015.0201
2014-05-05
国家重点基础研究发展计划(973计划)(2010CB732106)
熊春宝(1964—),男,博士,教授,主要从事工程结构健康监测的研究和教学。E-mail:tianliyundt@163.com
P228.4
:B
:0494-0911(2015)07-0014-04
