基于动节流流量计的力放大传感器的研究与设计
2015-05-07丁建梅张祥兵寇鲁丁
丁建梅,张祥兵,寇鲁丁
(1.东北林业大学机电工程学院,哈尔滨150040;2.哈尔滨工业大学机电工程学院,哈尔滨150001)
电阻应变式传感器在力检测领域应用较为广泛,其主要由弹性体、粘贴在弹性体上的应变片和基本检测电路组成。测量原理为弹性体受力发生变形,应变片将该变形转换为电阻的变化,基本检测电路则将电阻的变化转变为电流信号或者电压信号,通过检测电流或电压信号就可以测量弹性体所受到的力。
弹性体的设计是电阻应变式传感器的关键,其结构直接影响传感器的性能。本文从测力装置中应用最广泛的悬臂梁出发,研究影响测力性能的因素,并结合柔性铰链的放大机构,提出一种新型的力测量装置。运用ansys数值计算,辅助弹性体的设计,并在制成的传感器上验证实际工作性能。
1 测力悬臂梁
1.1 测力原理
在力检测机构中,悬臂梁应用得极为广泛,其测力原理如图1所示。在杆端施加一个作用力P,悬臂梁发生变形。

图1 悬臂梁机构Fig.1 Cantilever mechanism
由材料力学可知,悬臂梁端点挠度为

式中:l为悬臂梁杆长;E为材料弹性模量;I为截面惯性矩。
若悬臂梁截面为矩形,设长为b,高为h,则截面惯性矩

将公式(2)代入公式(1)有

悬臂梁上最大应力在悬臂梁靠近固定端的上下表面,其最大应力为

所以最大应变为

通常,可以把应变片贴在悬臂梁靠近固定端的部分,应变片阻值随着最大应变的变化而变化,从而测量P的大小。从公式(5)可以看出,若要使得ε较大,可以通过增加悬臂梁长度l、减小悬臂梁截面宽度b、减小悬臂梁高度h或者选择低弹性模量材料,相应地,悬臂梁端点挠度ν也增大了。
在悬臂梁力测量装置中,在一定力的作用下,希望其端点挠度较小,即刚度大;同时输出的应变值大,即传感器的灵敏度高。将公式(3)与公式(5)结合,并定义λ为应变挠度比,则有

从公式(6)看出,在设计悬臂梁传感器时,可以通过减小悬臂梁的长度和增大悬臂梁高度来提高应变挠度比λ。
1)相关景点的介绍。结合全域旅游项目的深入推广,对朱家尖景点做一个统一规划,利用互联网的优势打通各个景点之间的信息数据,通过统一的AR管理平台实现各个景点的详细介绍,为游客提供更好的旅游规划与策略支撑。
1.2 测力悬臂梁仿真
在动节流流量计中,计算得到动节流装置的位移为17.5 μm时,输出力P=1.59 N,取悬臂梁长度l=3.75 cm,h=0.3 cm,由式(5)可以算得

悬臂梁采用铝合金制作,其弹性模量E=0.7×1011Pa,则根据式(3)或式(5)可以求出悬臂梁截面宽度
圆整取b=1 cm,所以可以得出悬臂梁的几何尺寸:截面宽度b=1 cm,截面高度h=0.3 cm,悬臂梁长度l=3.75 cm。根据以上的尺寸得到了悬臂梁三维模型,并导入ansys对模型进行数值计算,其变形如图2所示,从图中可以看出,悬臂梁的最大应变为55.9 μξ,与理论计算值相差较小。
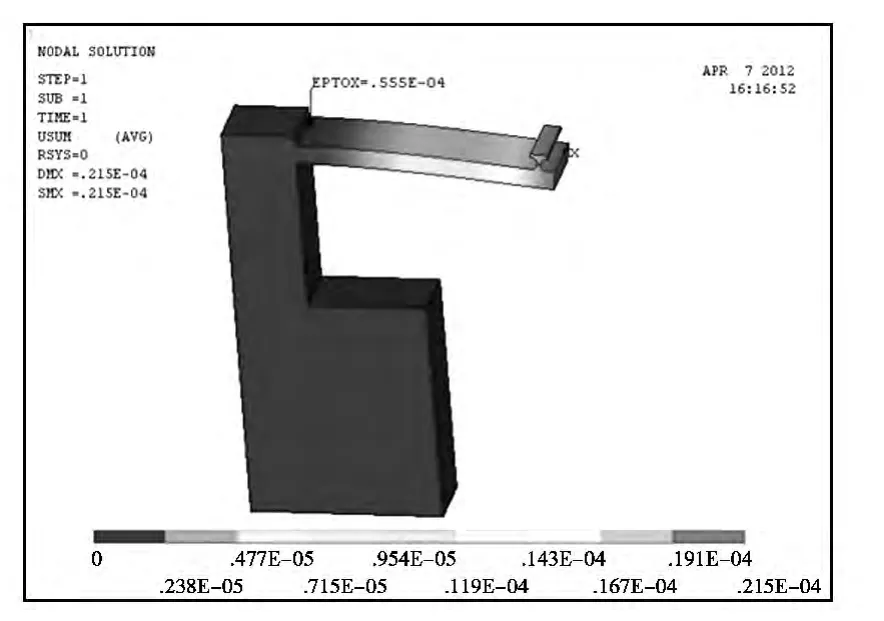
图2 悬臂梁机构变形Fig.2 Body deformation in cantilever beam
2 基于柔性铰链的力放大机构
在测力悬臂梁模型中,由于输入力较小导致最大应变比较小,现设计一种基于柔性铰链的力放大机构,扩大输入力P,在保证输入端位移不变的条件下,扩大弹性体上的最大应变,增大输出[1-2]。
2.1 柔性铰链
柔性铰链是一种新型的传动结构形式,它是利用结构薄弱部分的弹性微小角变形来完成类似铰链的运动传递,具有体积小、加工简单方便、无机械摩擦、无间隙、运动灵敏度高和响应快捷等优点[2]。柔性铰链由于其特殊的结构,决定柔性铰链的精度高、分辨率高。
柔性铰链通常有直梁型、圆角直梁型、直圆型、椭圆型、抛物线型和双曲线型柔性铰链。由于有限元分析结果和精度公式计算结果的偏差小于9%[3-7],因此可以用有限元模型来分析柔性铰链的刚度特性,且圆角直梁型柔性铰链具有最小的转动刚度(101N·m数量级),抛物线型柔性铰链具有最大的轴向拉伸刚度(108N·m数量级)[8-9],所以计算时可以忽略抛物线柔性铰链轴向的变形。
直圆型柔性铰链的结构示意图如图3所示,B为铰链宽度,T为薄弱处最小厚度,R为切口半径,L为铰链总长。

图3 直圆型柔性铰链参数Fig.3 The parameters of right circular flexible hinge
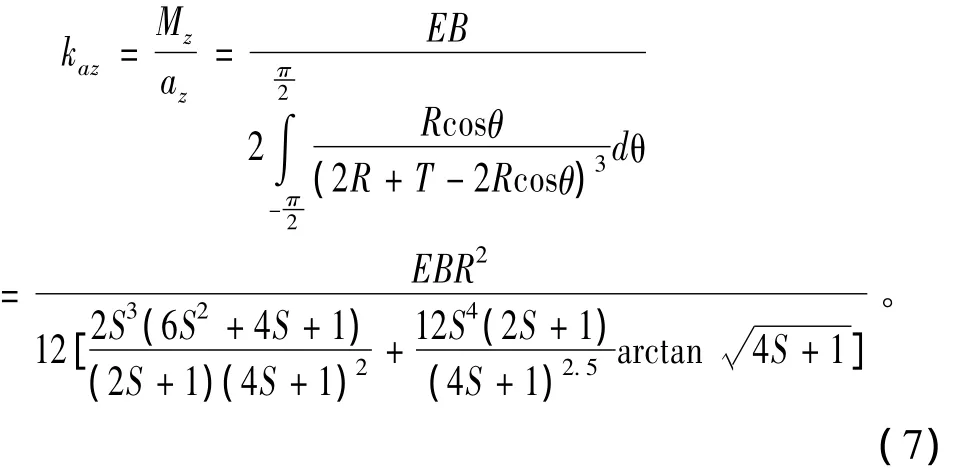
式中:az为柔性铰链在力矩Mz作用下的转角变形量;E为材料的弹性模量;为比例系数(s=R/T)。
由此,柔性铰链的刚度kaz主要决定于铰链结构参数B,R,T及材料的弹性模量等。
2.2 柔性铰链力放大机构设计
柔性铰链利用结构薄弱部分的弹性微小角变形来完成类似铰链的运动传递,与悬臂梁结合时,可以设计出输入刚度大、输出应变可观的测力机构。
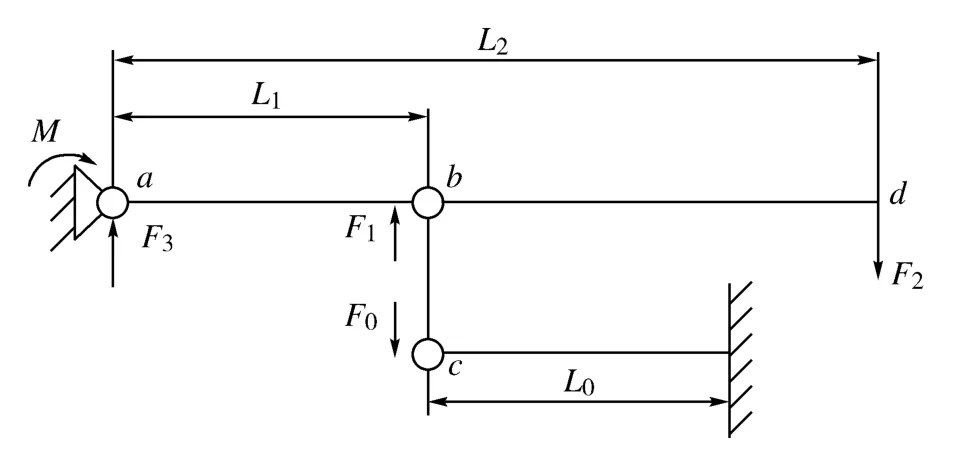
图4 力放大机构原理Fig.4 Force amplifier theory
力放大机构的原理如图4所示。利用杠杆原理将输入力F2放大,铰链a、b、c均为柔性铰链。由于铰链a主要受弯矩作用,所以采用圆角直梁型柔性铰链;由于铰链b、c主要受拉压力作用,所以采用抛物线型柔性铰链。
为了简化分析,设铰链a对杠杆的弯矩为M,铰链b对杠杆的支反力为F1,则有
由于抛物线轴向刚度极大,可以忽略铰链b、c轴向变形,铰链c的位移与铰链b的位移相等,把铰链c看作悬臂梁的端点,那么铰链c的位移可以写成

结合公式(7)~(12)可以得到

2.3 柔性铰链放大机构仿真
动节流装置位移为17.5 μm时,输出力P为1.59 N。取悬臂梁h=0.3 cm,b=1 cm,采用铝合金制作,其弹性模量E=0.7×1011Pa。杠杆尺寸L1=10 mm,L2=40 mm,柔性铰链H=5 mm,t=0.4 mm。将参数代入公式(14)、(15),得到,圆整L0=1.5 cm,根据公式(13)可以得到ε=87.5 μξ。
对比力放大前后悬臂梁上最大应变值可以得出,经过力放大后应变值放大倍数为η=87.5/56=1.56。
由此得到的柔性铰链力放大机构模型,将其导入ansys对模型进行数值计算[11-12],其变形如图5所示。

图5 力放大机构变形图Fig.5 Power amplifier distortion
由ansys计算结果得到悬臂梁上最大应变为76.8 μξ,与理论计算值稍有偏差,其主要原因是理论计算时忽略了直圆型柔性铰链的轴向、侧向变形,抛物线型柔性铰链的转动和轴向、侧向变形。全方位考虑柔性铰链的工作性质,ansys分析的结果更能反映力放大结构的真实变形情况。最大应变放大倍数为
3 实验结果及分析
将柔性铰链力放大机构制成电阻应变式传感器,安装在动节流流量计中,如图6~图7所示,调节流量控制阀以控制通过流量计的流量,传感器会有电阻值的变化,通过静态应变仪将不同流量下传感器的输出值记录下来,见表1和表2。
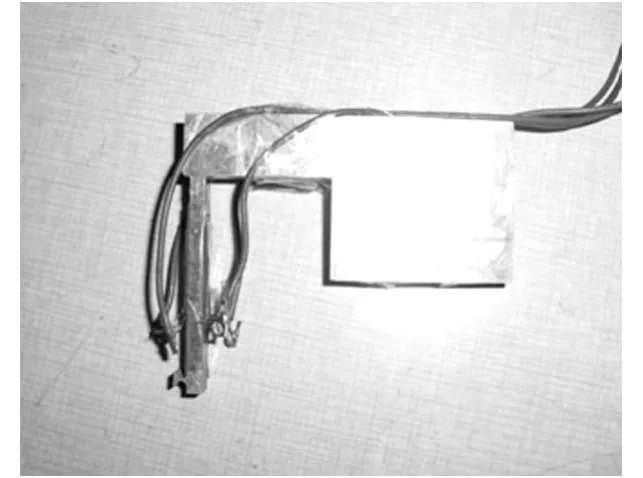
图6 悬臂梁传感器Fig.6 Cantilever sensors
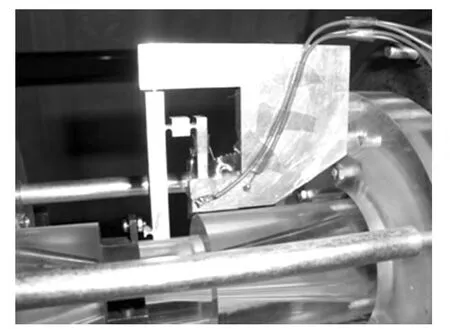
图7 力放大传感器Fig.7 Power magnification sensor

表1 悬臂梁传感器输出Tab.1 The output of cantilever sensors
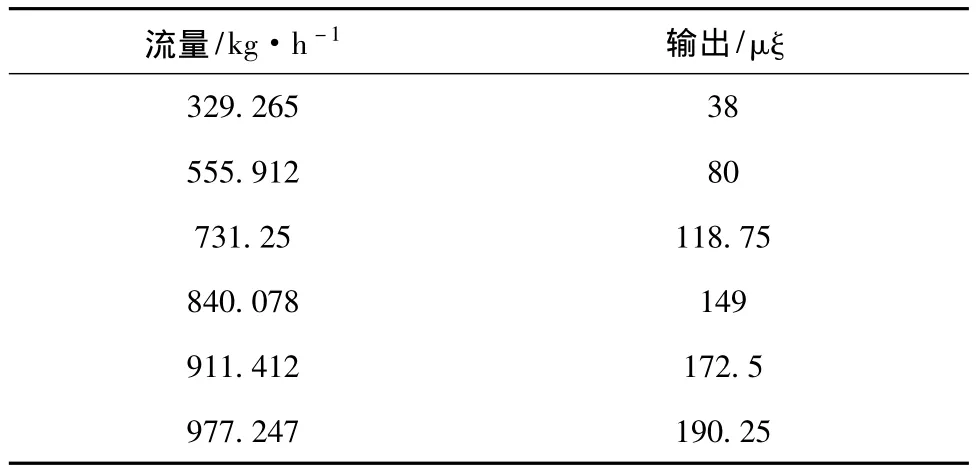
表2 力放大机构传感器输出Tab.2 The output of force amplifier
比较表1与表2的数据发现,力放大机构传感器的输出比悬臂梁传感器输出大,高出大约30%左右,这与ansys仿真结果一致。且力放大传感器比悬臂梁传感器所测得的流量要小。
4 结论
本文在分析了悬臂梁和柔性铰链力放大机构的工作流程基础上,通过理论推导,研究设计了力放大机构传感器和悬臂梁传感器模型;并将其导入ansys中对其仿真数值分析,得出力放大机构和悬臂梁的最大应变值。对比理论计算和ansys计算结果,证实ansys仿真分析结果更能充分反映力放大结构的真实性。将力放大机构传感器和悬臂梁传感器分析安装在动节流流量计中进行测试,在相同状况下,力放大机构传感器的输出性能比悬臂梁传感器的性能好,大约能提高30%左右,说明用力放大机构做传感器灵敏度高,输入力的测量范围大,从而提高了输入力的测量范围。本文建立的柔性铰链力放大传感器模型,可为柔性铰链工程优化设计提供理论依据。
[1]胡 淏,董景新,刘云峰,等.微机械杠杆力放大效果的计算和提高[J].中国惯性技术学报,2011,19(1):91-94.
[2]任 杰,樊尚春,郭占社.谐振式微加速度计杠杆机构的建模与优化[J].微纳电子技术,2007(7):17-19.
[3]孙汉宇.用于压电陶瓷驱动器的纳米位移传感器信号的采集与处理系统设计[D].合肥:中国科学技术大学,2011.
[4]张志杰,袁怡宝,朴伟英.典型柔性铰链回转精度性能计算与分析[J].纳米技术与精密工程,2007,5(3):200-204.
[5]何高法,唐一科,周传德.基于柔性铰链机构的谐振式微加速度计设计制作[J].中国机械工程,2010,22(4):410-414.
[6]陈贵敏.混合型柔性铰链的研究[J].仪器仪表学报,2004,25(2):108-111.
[7]赵 磊,巩 岩.直梁圆角型柔性铰链的回转精度分析[J].中国机械工程,2013,24(6):714-719.
[8]于志远,姚晓先,宋晓东.基于柔性铰链的微位移放大机构设计[J].仪器仪表学报,2009,30(9):1818-1822.
[9]王思民,云 霞,陈军政.基于柔性铰链微位移放大机构的设计和分析[J].液压气动与密封,2011(1):17.
[10]吴鹰飞,周姚英.柔性铰链转动刚度计算公式的推导[J].仪器仪表学报,2004,25(1):125-128.
[11]张建翎,陈万银,可欣荣,等.一种微位移放大机构的设计与仿真[J].机械设计,2009,26(12):9-12.
[12]林洁琼,王 磊,李迎春,等.基于有限元的柔性铰链微位移放大机构设计[J].机床与液压,2009,39(10):21-23.
