基于CMAC-模糊PID模型的火箭炮调平控制系统仿真
2015-05-06邢立新沈中卿
邢立新,沈中卿
(陆军军官学院,合肥 230031)
【装备理论与装备技术】
基于CMAC-模糊PID模型的火箭炮调平控制系统仿真
邢立新,沈中卿
(陆军军官学院,合肥 230031)
针对传统PID模型在火箭炮调平系统中出现调平速度不快、调平精度不高等现象,提出了一种小脑神经网络(CMAC)与模糊PID相结合的算法,充分利用模糊PID在超调量方面的优势和CMAC的自适应能力,使得车载调平控制系统的调平效果得到了很大的提高。仿真结果表明,相对于传统的PID模型和模糊PID,CMAC-模糊PID模型无论在超调量、调平精度、调节时间和抗干扰的能力上都有显著的提高。
调平控制;小脑神经网络;模糊PID
作为陆军装备中的主站装备,某型火箭炮因威力大,射程远,精度高等优点,在战斗中多担任火力突击、火力支援等任务。但是随着武器装备自动化程度的不断提高,对于该型火箭炮进行技术检查的难度也在逐步增大。
在火箭炮技术检查项目中,很多都是在火箭炮平台处于水平的情况下进行的。因此作为其他技术检查的前提条件,火箭炮平台的水平精度必须要达到很高的精度。目前,运用在雷达、导弹发射车和坦克等其他武器装备上的调平算法多采用的是传统PID模型,不仅在精度上得不到保证,在稳定性和抗干扰能力上也达不到要求。
为此,本研究在传统PID控制模型的基础上,提出了模糊PID的概念,并将输入输出作为CMAC的样本对其进行训练,最终达到取代模糊PID模型控制液压千斤顶的目的。
1 液压千斤顶数学模型的建立
本调平系统采用的是4点式液压调平系统,由于4个千斤顶的构造完全相同,因此所有千斤顶的数学模型都一样,这里为了便于研究,就某一个液压千斤顶作为研究对象。
液压千斤顶的示意图如图1所示。其主要的工作过程由3种状态组成[1-2]:刚性支撑状态,液压千斤顶上升状态和千斤顶下降状态。当液压千斤顶处于刚性支撑时,比例控制阀3处于中间位置,此时液压泵处于卸荷状态,液压缸与油箱之间的油路锁死,液压千斤顶处于静止状态;当液压千斤顶处于上升状态时,比例控制阀3工作在右边位置,液压泵在电机的驱动下处于工作状态,液压油一路经滤油器8、液压泵7、压力补偿器4、比例控制阀3、左边的液控单向阀2至无杆液压缸驱动液压千斤顶上升,另外一路驱动右边的液控单向阀2打开,使得有杆液压缸内的液压油能够经右单向阀2、比例控制阀3流向油箱5;当液压千斤顶处于下降的状态时,比例控制阀3工作在左边位置,此时液压泵处于工作状态,液压油一路经滤油器8、液压泵7、压力补偿器4、比例控制阀3、右边的液控单向阀2至有杆液压缸驱动液压千斤顶下降,另外一路驱动左边的液控单向阀2打开,使得无杆液压缸内的液压油能够经左单向阀2、比例控制阀3流向油箱5。无论处于上升还是下降状态,液压千斤顶的速度都是由比例控制阀3决定的[3,4]。
因为本文主要是就控制系统进行讨论,所以液压千斤顶的数学模型主要参考文献[5]中液压千斤顶的传递函数
(1)
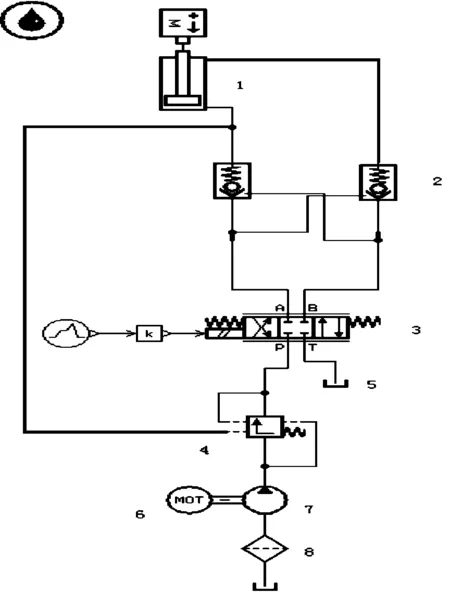
1.液压缸 2.液控单向阀 3.比例控制阀 4.压力补偿器5.油箱 6.电机 7.液压泵 8.滤油器
2 CMAC-模糊PID控制模型的建立
该调平系统采用的控制模型主要由3个控制器组成:PID控制器、模糊控制器和CMAC控制器,具体的结构图如图2所示。模糊控制的作用是实时修正PID控制模型的系数,达到减小超调量的目的;而CMAC控制与模糊PID控制在控制系统中处于并列关系,将2种控制模型有机地结合起来,可使调平系统在精度和速度上都有所提高。
在调平控制初期只采用模糊PID控制,这时模糊PID的期望值与输出值将被保存起来,用于训练CMAC模型;随着控制时间的增长,模糊PID的输入输出样本不断增加,CMAC控制精度也会逐步提高,此时CMAC将与模糊PID模型一起控制液压千斤顶运动,并且CMAC的控制权重越来越大;最终,控制系统完全采用CMAC控制
u(n)=up(n)+un(n)
(2)
其中,up(n)、un(n)、u(n)分别为模糊PID、CMAC和控制系统的控制输出量。
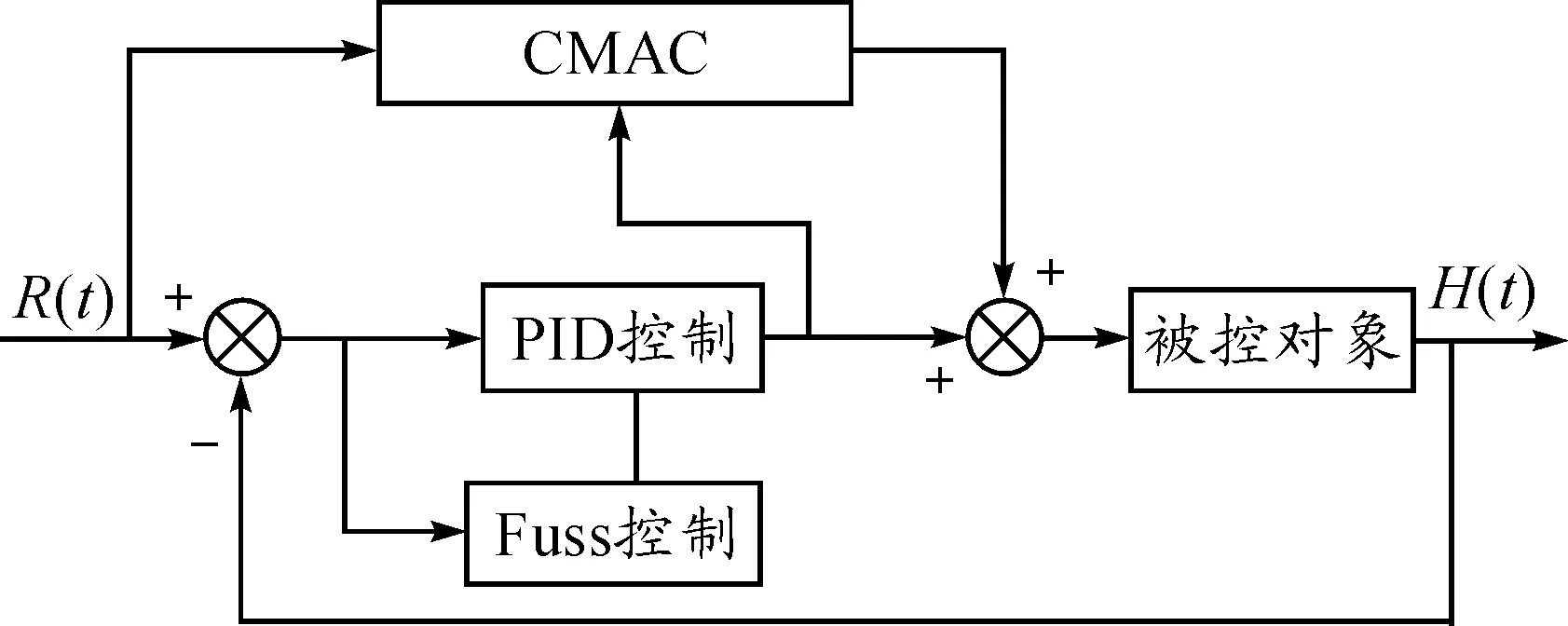
图2 调平控制系统结构
2.1 模糊PID控制
1) 传统PID控制
传统的PID控制是将液压千斤顶的高度期望值R(t)(液压千斤顶需要上升的高度)与液压千斤顶的实时高度反馈信号H(t)之间的差值,经过比例、积分和微分单元处理后求和,得到输出控制量。公式可以表达为[6]
(3)
但是实际运用过程中,大多PID控制器接收的都是数字信号,所以这里可将传统PID控制转化为数字PID控制,计算式为
(4)
其中kp0、ki0、kd0分别为传统PID控制的比例系数、积分系数和微分系数。这些参数可以根据液压千斤顶的传递函数来确定值的大小。n为液压千斤顶实际高度的采样时刻,T为实际高度的采样周期。
3个控制单元所起到的作用是不一样的[7]:比例控制量是由比例系数KP0和偏差e(n)的乘积构成,在调平控制中起到快速调平的作用,但是过大的kp0会使得系统不稳定;积分控制量主要是消除控制系统的静态误差,而且随着控制时间的增加,静态误差越来越小。但是过大的积分系数ki0会增大液压千斤顶的超调量;微分控制反应的偏差信号e(n)的变化趋势,从而减小系统的超调量,提高系统的动态特性。
2) 模糊控制
在实际工程运用中,3个恒定的PID系数,在多变的外部环境和复杂的千斤顶的情况下,控制效果是不理想的。为了提高传统PID的适应能力,引入模糊PID控制模型。根据各种不同的情况实时对PID系数进行修正,使PID在控制精度与控制速度上都得到了提高。
综合考虑控制精度和控制复杂度的影响,模糊控制模型选取高度偏差量e(n)与高度的偏差率ec(n)作为输入,输出为PID的比例、积分和微分系数的修正值Δkp0、Δki0和Δkd0,所以模糊控制的结构如图3所示[8]。
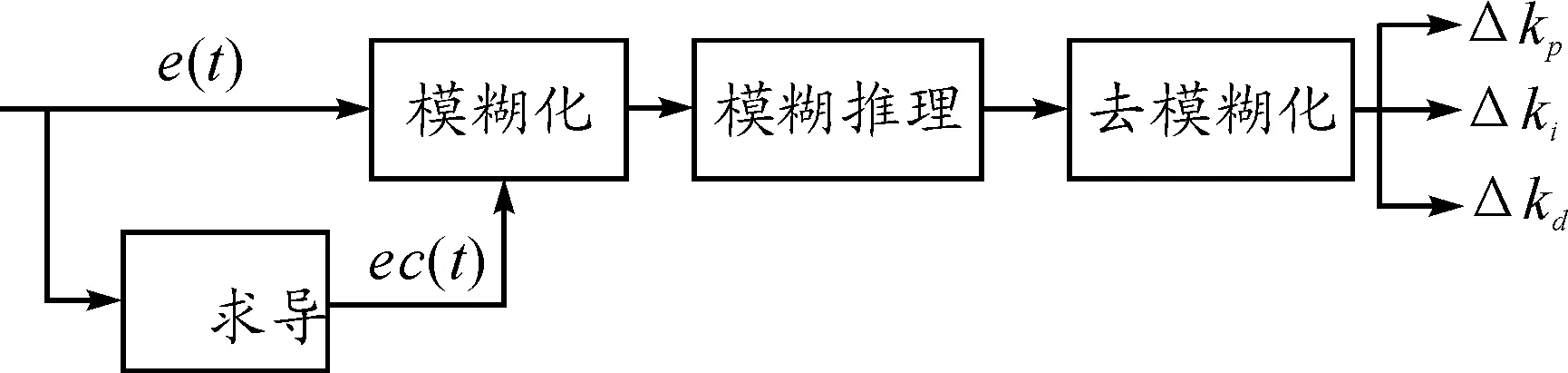
图3 模糊控制器结构
由图3可知模糊控制主要有3个步骤组成:输入信号的模糊化、模糊推理和输出信号的去模糊化。其中将所有输入输出的模糊子集定义为{负大,负中,负小,零,正小,正中,正大}即{NB NM NS Z PS PM PB};模糊子集的隶属度函数分为3类:在负大式采用Z型分布,正大时采用S型分布,其他的采用三角形分布;输出信号的去模糊化采用最大隶属度法。而对于模糊规则的确定,多采用经验归纳法。这里可总结3个规则:
控制初期,偏差e(n)较大,为了尽快减少偏差,此时的kp0、kd0因选取大点,但是kp0过大会产生过度的超调量,此时要加大积分控制来削弱超调量;
稳定状态,随着偏差e(n)与偏差率ec(n)的减小,kp0、kd0也随着减小,此时ki0要选取适当;
稳定状态后,为了增加系统的抗干扰能力,kp0、kd0应选择较大值。
所以模糊PID的输出分别为的比例系数修正量kp、积分系数ki与微分系数kd分别为
kp=kp0+Δkp0
ki=ki0+Δki0
(5)
其中,kd=kd0+Δkd0。
2.2 CMAC控制
CMAC为小脑模型神经网络,这个模型的提出主要模拟小脑的工作原理。小脑主要通过一些神经纤维与大脑相连。主要管理运动能力,通过小脑皮层的神经传导作用,接收四肢和各个感官部分接收感觉信息以及这些部位的反馈信息,并将这些接收信息存储到特定的区域,在需要的时候可以提取这些存储信息,转化为驱动肌肉运动的指令,这相当于控制环节;当感觉信息与反馈信息冲突的时候,小脑便通过联想对这些信息进行协调,从而控制运动,这个环节就是学习过程[9]。其具体的结构图4所示。

图4 CMAC控制器结构
对于本系统来说,CMAC的工作原理是将高度期望值R(t)进行量化处理,且量化区间参数为N。每个量化区间都有C个元素组成,C就是泛化参数。而且越相近的量化区间,重合的元素越多。所以对于高度期望值相近的输入,输出的控制量之间的差值也越小,这符合CMAC的泛化能力[10]。
所以CMAC控制系统的量化公式为
(6)
式中:Smin、Smax分别构成了输入信号论域的上下限;i∈[C+1,C+N]。
对于某一特定的输入R(K)来说,就是根据其数值的大小找出其所在的量化区间的组成元素。这里用二进制0和1来表示,当元素的值为1时,说明该元素对此时的系统控制起作用,当元素等于0时,说明不起作用。
所以地址映射公式为
(7)
确定量化区间后,就可以求和得到CMAC输出控制量,这里也就是CMAC的函数计算
(8)
其中Wi(k)为元素ai在k时刻所对应的系数。
CMAC也属于神经网络的范畴,所以对系数的修正是关系到控制精度的关键,这里采用梯度下降法。所以CMAC的学习公式为:
wi(k)=wi(k-1)+Δwi(k)+α(wi(k)-wi(k-1)
(9)
(10)
(11)
其中,η、α分别CMAC的学习系数和惯性系数。
3 调平系统仿真
由被控对象(液压千斤顶)的传递函数,根据N-Z法可以求得PID模型的3个系数分别为:kp0=23、ki0=25、kd0=5.2,令液压千斤顶的预设值H(t)=100 mm,将偏差e、偏差率ec、比例、积分和微分系数修正量的论域分别设为[-0.1,0.1]、[-3,3]、[-12,12]、[-24,24]、[-0.15,0.15]。
小脑神经网络的惯性系数α为0.05,学习系数η为0.1,量化区间N为100,泛化参数C为5。在30 s的时候,加上干扰信号为0.02 mm。则经过Matlab仿真得到3种方法的比较图如图5所示。
由图5可以得出,在超调量上,模糊PID比传统PID略小,都在0.14左右,而CMAC-模糊PID几乎不存在超调量;在调平时间上,模糊PID与传统PID在24 s达到稳定,CMAC-模糊PID在10 s达到稳定;在30 s施加干扰信号,模糊PID与传统PID在45 s重新达到稳定,CMAC-模糊PID在35 s重新达到稳定。
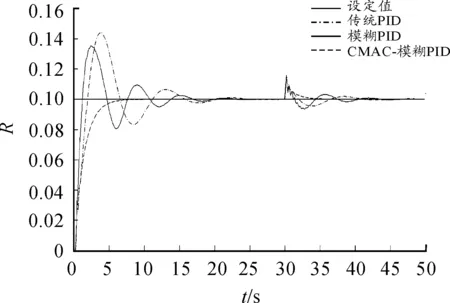
图5 3种方法的仿真比较
4 结束语
分析了CMAC-模糊PID模型的数学模型与控制机理,并通过Matlab仿真得出在调平速度、超调量和抗干扰等方面,CMAC-模糊PID模型相对于普通PID模型具有明显优势,该模型可以运用到武器装备(导弹发射车、雷达)的调平过程中,具有很好的机械和军事价值。
[1] 陈晋市,元万荣.基于AMESim等滑移装载机自动调平系统[J].吉林大学学报.2012(6):1390-1395.
[2] 仕润霖,冯永保.模糊PID控制的车载平台高精度动态调平仿真研究[J].机床与液压.2013(5):150-153.
[3] 李再军.某牵引高炮液压调平油缸动态特性研究[J].四川兵工学报.2010(12):28-31.
[4] 陆晓兵.压桩机调平规划与电液自动控制研究[D].长沙:中南大学,2008.
[5] 付宝军,仲崇亮,刘明.基于单轮车辆悬架的Fuzzy-PID控制器设计与仿真[J].电子设计工程.2011(4):102-104.
[6] 刘均益,何清华.基于PID控制算法等自动调平系统等仿真系统[J].中国工程机械学报.2011(4):452-456.
[7] 罗天洪,尹信贤.基于AMESim等高空作业车调平系统仿真[J].计算机集成制造系统.2012(1):118-124.
[8] 赵娟平.神经网络PID控制策略及其Matlab仿真研究[J].微计算机信息.2007(7):79-83.
[9] 张霖,李俊明.车载倒立摆系统非线性未建模动态的CMAC补偿控制[J].控制工程.2014(5):121-128.
[10]张彬彬.飞机地面空调车控制智能温度控制算法的应用研究[D].沈阳:沈阳航空航天大学,2012.
(责任编辑 周江川)
Simulation Research of Rocket Artillery Leveling Control System Based on CMAC-Fuzzy PID Model
XING Li-xin, SHEN Zhong-qing
(Army officer Academy, Hefei 230031, China)
For solving the problem of slow leveling speed and low leveling accuracy caused by traditional PID model in the leveling process of rocket artillery, CMAC-Fussy PID model which takes advantage of small overshot of fussy-PID model and adaptive ability of CMAC model was proposed to improve the leveling effect. The simulation results of MATLAB show that CMAC-Fussy PID model is better than traditional PID model and Fuzzy PID model not only in overshot, leveling accuracy and leveling time, but in the capacity of resisting disturbance.
leveling control; CMAC; fuzzy PID
2015-02-25
邢立新(1964—),男,教授,主要从事炮兵射击研究。
10.11809/scbgxb2015.08.001
邢立新,沈中卿.基于CMAC-模糊PID模型的火箭炮调平控制系统仿真[J].四川兵工学报,2015(8):1-4.
format:XING Li-xin, SHEN Zhong-qing.Simulation Research of Rocket Artillery Leveling Control System Based on CMAC-Fuzzy PID Model[J].Journal of Sichuan Ordnance,2015(8):1-4.
TJ393
A
1006-0707(2015)08-0001-04
