USV 平台性能设计的层次分析模糊综合评估
2015-05-06马天宇王涛涛杨松林姚晓宁
马天宇,王涛涛,辛 磊,杨松林,姚晓宁
(江苏科技大学船舶与海洋工程学院,江苏镇江212003)
0 引言
水面无人艇是一种能够遥控或自主航行的小型无人化水面运动平台[1,2]。通过搭载不同传感器或设备模块,USV主要用于完成水面巡逻、情报搜集、监视与侦察、反水雷、反潜、中继通信、干扰敌军通信网络、诱杀敌方潜艇、远程火力攻击等不同任务[3]。
近年来,对于USV的研究,在很多方面都取得了显著的进展。但在水面无人艇平台性能的设计方面,一直缺少理论性的体系指导。USV平台性能设计过程复杂,随机性较强,因此这是一个值得探讨的问题。本文以层次分析(AHP)和模糊数学理论为基础,针对USV平台性能设计中的各项因素指标,建立了USV平台性能设计的指标评估体系。通过C#语言开发了界面友好的USV平台性能设计模糊综合评估软件系统,并通过USV平台性能设计方案算例验证了其可靠性。
1 层次分析和模糊综合评判
层次分析法(Analytic Hierachy Process,简称AHP法)是由美国运筹学专家T.L.Saaty于20世纪70年代提出的一种将定性和定量相结合的系统层次分析方法[4]。
模糊综合评判法是一种基于模糊数学的综合评价方法。该方法根据模糊数学的隶属度理论把定性评价转化为定量评价,即用模糊数学对受到多种因素制约的事物或对象做出一个总体的评价。它具有结果清晰,系统性强的特点,能较好地解决模糊的、难以量化的问题,适合各种不确定性问题的解决[5]。
2 评估体系
USV平台性能设计是一个复杂而又庞大的系统,它包括硬件、软件和环境等复杂多变的因素。设计指标的选取应遵循系统性、可比性、科学性、实用性和可操作性,以保证评价结果客观、准确。本文在对USV平台性能设计系统分析的基础上,吸取相关船舶领域专家的知识和经验[6-8],构建了水面无人艇平台性能设计指标评估体系,如图1所示。其中,一级指标3个,分别为:总体性能GP,艇体性能HP和隐蔽性能CP;二级指标16个,分别为:外形U1,排水量 U2,航速 U3,续航力 U4,控制方式 U5,快速性U6,操纵性 U7,耐波性 U8,浮性 U9,稳性 U10,抗倾覆性U11,雷达反射波 U12,红外特性 U13,磁特性 U14,噪声U15和可见光U16;三级指标10个,分别为:航向稳定性U71,回转性 U72,转艏性和跟从性 U73,停船性 U74,横摇 U81,纵摇 U82,艏摇 U83,横荡 U84,纵荡U85和垂荡 U86。
3 评估流程
3.1 综合评估数学模型
根据USV平台性能设计指标的评估体系,建立了基于AHP的综合评估数学模型,见式(1)。
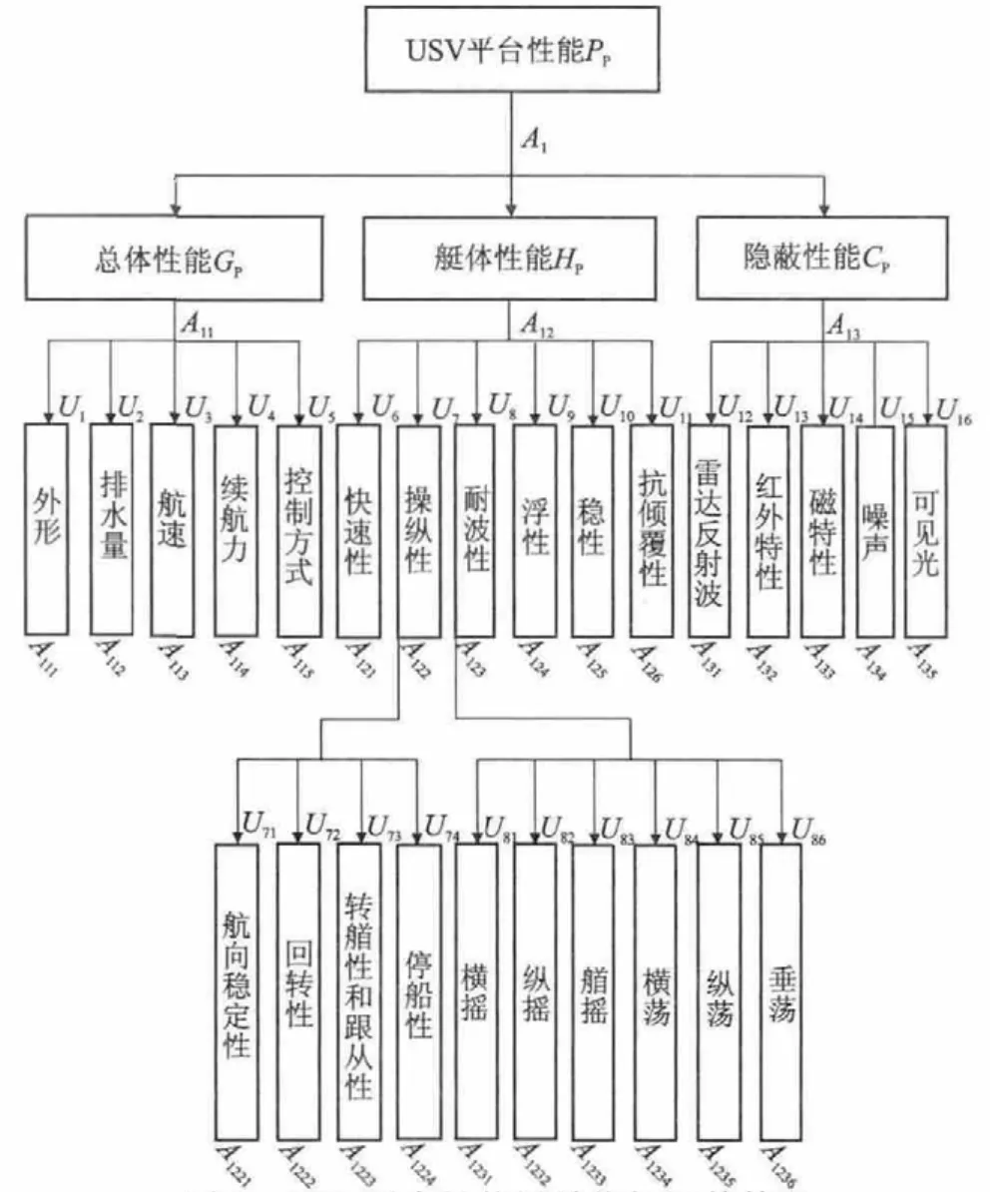
图1 USV平台性能设计指标评估体系
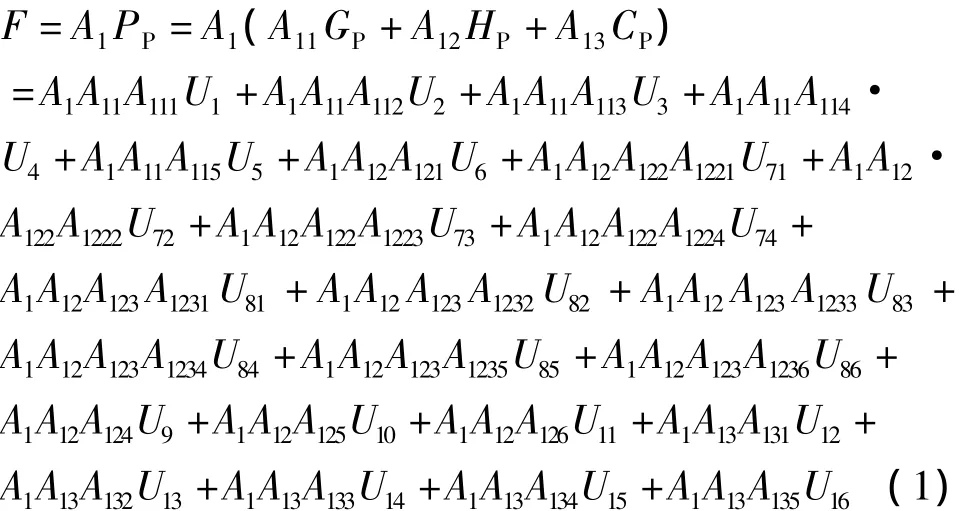
式中:A11、A12和 A13分别为 GP、HP和 CP的权重;A111~A115分别为U1~U5的权重,A121~A126分别为 U6~U11的权重,A131~A125分别为 U12~U16的权重;A1221~A1224分别为 U71~U74的权重,A1231~A1236分别为U81~U86的权重。
3.2 评价指标权重的确定
在多指标综合评价中,权重的确定是一项最基本也是最重要的工作。权重值的大小直接影响到综合评价的结果,权重值的变动可能引起被评价对象优劣顺序的改变。因而需合理地确定指标权重。
根据图1列出的USV平台性能设计指标评估体系,采用AHP原理,确定各级指标权重。
USV平台性能设计方案评估体系中各指标的权重通过以下步骤进行计算:
(1)对同一层次的各元素关于上一层次中某一准则的重要性进行两两比较,构造两两比较判断矩阵(Pi,Qi,Ri)。在判断过程中利用1~9标度法将定性的评价指标转化为定量指标进行评价。1~9标度的含义见表1。
(2)由判断矩阵(P,Q1,Q2,Q3,R1,R2),采用和积法计算各级指标判断矩阵的特征向量(指标权重):
第一层指标权重向量B=(A11,A12,A13);
第二层指标权重向量 C1=(A111,A112,A113,A114,A115),C2=(A121,A122,A123,A124,A125,A126),C3=(A131,A132,A133,A134,A135)。
第三层指标权重向量 D1=(A1221,A1222,A1223,A1224),D2=(A1231,A1232,A1233,A1234,A1235)。
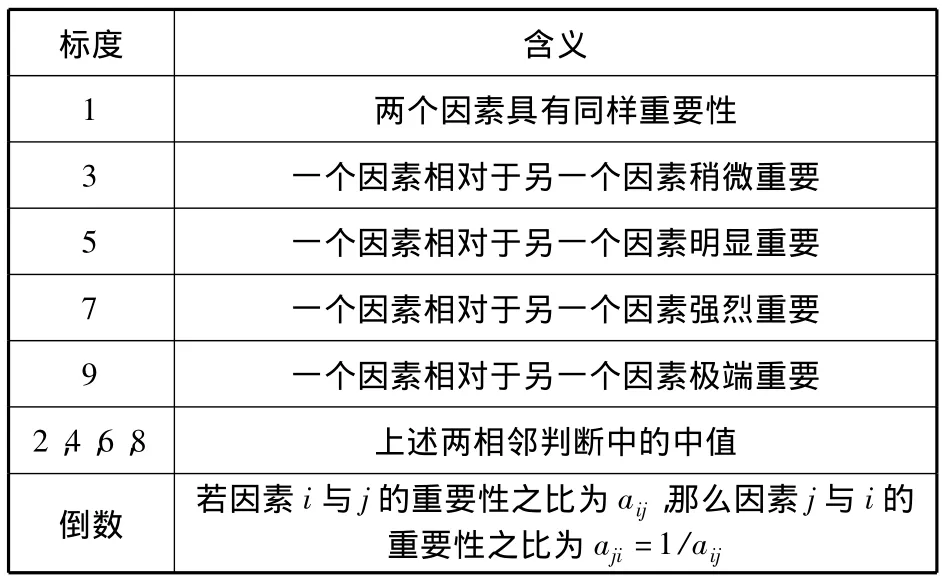
表1 1~9标度的含义
(3)一致性检验。一致性检验指标CI为:

式中:n为判断矩阵A的阶数,λmax为判断矩阵A的最大特征根。
计算一致性比例CR:

式中:RI为平均随机一致性指标,是CI的修正系数,RI取值见表2。
经计算,CR<0.1,判断矩阵满足一致性要求。
3.3 隶属度计算
隶属函数采用模糊分布的方法确定。通过大量艇体数据对各个性能指标的最后一层因素进行统计分析,选择模糊数学中对应的隶属度函数进行拟合,确定相应隶属度函数,计算得出相应的隶属度。
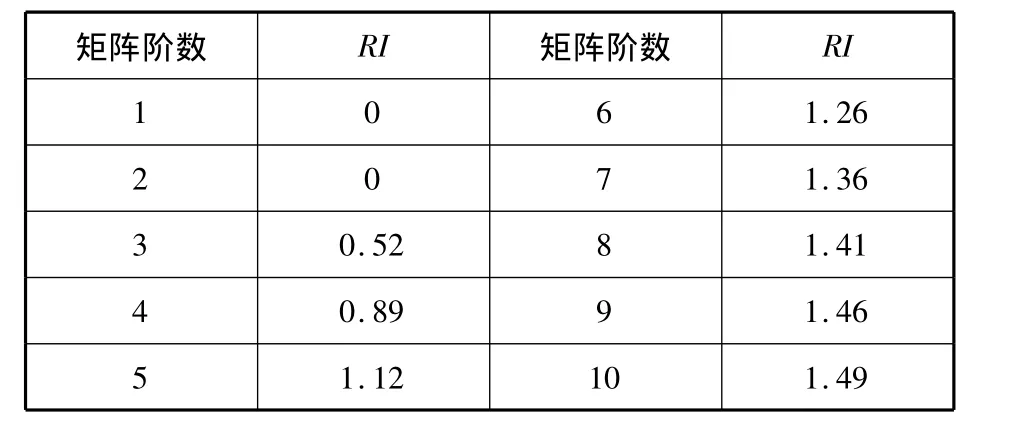
表2 平均随机一致性指标RI
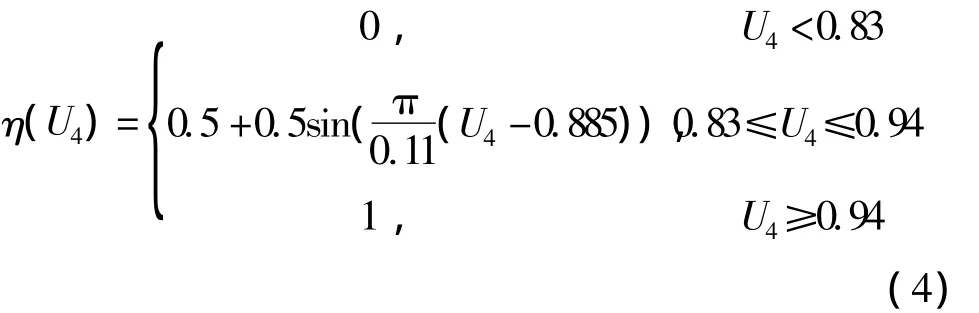
以二级指标中的续航力子系统U4为例,构造其隶属度函数,见式(4)。将U4值代入隶属度函数η(U4)中,就可得到相应的续航力的隶属度。续航力的模糊分布函数采用偏小型岭形分布,其他最后一层的评价指标的隶属度计算方法同理可得到。
4 系统设计与算例分析
VS2010是微软的一种软件开发平台,C#是微软配合平台而推出的一种新型的面向对象程序设计语言。它具有C++的功能,又像Visual Basic一样简单。C#利用 VS2010作为其强大的平台,使它在Windows图形界面等方面得到广泛应用。
4.1 系统设计
根据上述的平台性能设计方案的模糊综合评价方法的分析,在VS2010平台上应用C#语言开发了界面友好的USV平台性能设计的模糊综合评价软件系统。设计流程如图2所示,软件系统界面如图3所示。界面主要包括两方面内容:
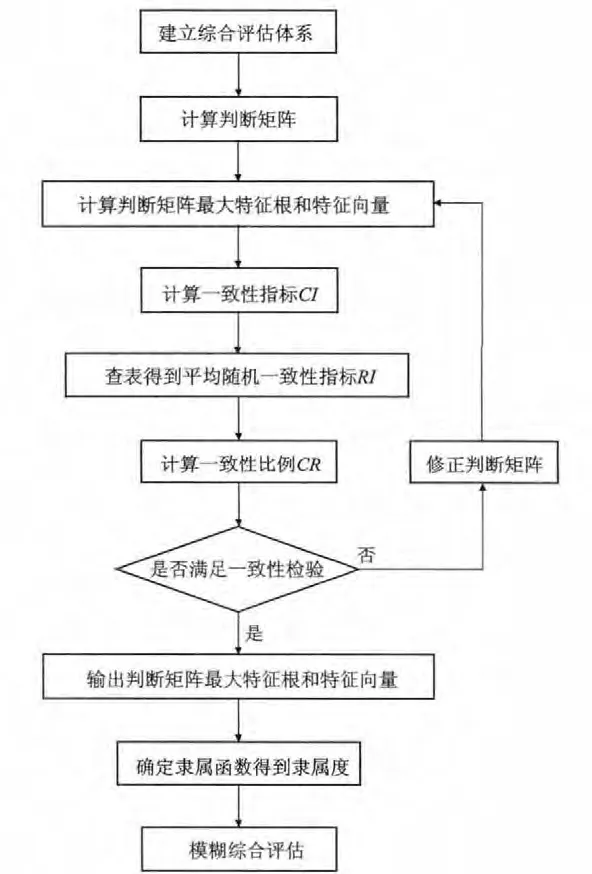
图2 软件系统设计流程图
(1)一级、二级、三级设计指标的权重设置和设计指标的上下限、取值。
(2)评估计算得到的评估结果。
该软件系统使用方便,具体操作步骤为:
(1)按照输入设计的要求指标,填入权重,设计范围和设计变量。
(2)点击评估计算button控件,软件系统内部的程序会按设计的要求进行计算,在界面右上方会显示得到的USV平台性能设计综合评估的结果。
4.2 算例分析
本文以2艘自主航行的无人滑行艇USV-1和USV-2为例,对USV平台性能设计进行模糊综合评估。这里主要考虑操纵性和耐波性的指标因素的不同。评估结果显示,USV-1值约为0.658 8,USV-2值约为0.754 4;在航向稳定性、横摇、纵摇和横荡方面,USV-2有明显的优势。综合比较分析可知:USV-2平台性能设计方案比较好。由此可见,本文将AHP与模糊综合评判法相结合运用到USV平台性能设计方案的综合评估中具有一定实用价值,为USV平台性能设计提供了一种可靠的方法。
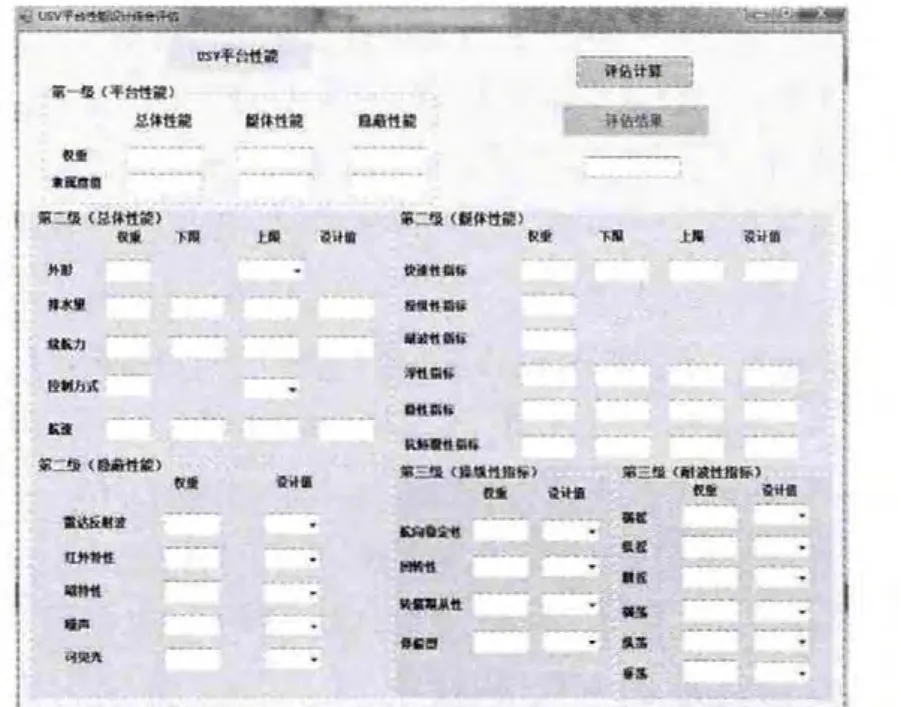
图3 软件系统界面
5 结论
本文系统研究了基于AHP法的USV平台性能设计的综合评估数学模型,采用模糊综合评判方法构造USV平台性能总目标函数,利用层次分析法确定了各个子系统的权重,通过大量艇体数据对各个性能指标进行统计分析,选择模糊数学中对应的隶属度函数进行拟合,确定了相应隶属度函数参数,最终基于C#语言在VS2010上开发了界面友好的USV平台性能设计综合评估软件系统并验证了其可靠性,为USV平台性能的设计提供了一种综合评估的新方法和技术体系。
[1] 周洪光,马爱民,夏朗.无人水面航行器发展[J].国防科技,2009,30(6):17-20.
[2] 李家良.水面无人艇发展与应用[J].火力与指挥控制,2012,37(6):203-207.
[3] 马天宇,杨松林,王涛涛,等.多USV协同系统研究现状与发展概述[J].舰船科学技术,2014,36(6):7-13.
[4] 穆歌,李巧丽,孟庆均,等.系统建模(第2版)[M].北京:国防工业出版社,2013.
[5] 杨松林.工程模糊论方法及其应用[M].北京:国防工业出版社,1996.
[6] 曾广武,吴九强,肖伟,等.舰艇综合性能优化中的层次分析模糊综合评判方法及其程序系统开发[J].中国舰船研究,2007,2(1):19-23,29.
[7] 史国友,贾传荧.船舶操纵安全综合评判数学模型的研究[J].大连海事大学学报,1997,23(3):16-20.
[8] 肖袁根,眭爱国,侯小军,等.基于模糊数学法的舰船耐波性综合评价[J].中国造船,2011,52(1):235-244.