大型体育场开闭式屋盖同步运行控制设计
2015-05-04陈雄浙江精工钢结构有限公司建筑机器人工程部上海200233
陈雄(浙江精工钢结构有限公司 建筑机器人工程部,上海 200233)
大型体育场开闭式屋盖同步运行控制设计
陈雄
(浙江精工钢结构有限公司 建筑机器人工程部,上海 200233)
主要阐述体育场开闭式屋盖运行时卷扬机与驱动台车的同步控制、单片屋盖两侧的同步控制。同步控制采用西门子PLC内部PID控制器来实现,同步运行效果非常理想。
同步控制;可编程控制器;现场总线;PID控制器;绝对值编码器
0 引 言
可开闭屋盖建筑是建筑项目中机械结构系统与控制系统的集成,国际上已建的开闭屋盖建筑中,不乏因为两者协调关系未处理好,特别是屋盖两侧同步运行控制不好,导致屋盖结构变形严重,而造成运行困难、耐久性差以至于开闭功能丧失的情况。因此开闭式屋盖系统的技术难点就是控制系统与机械结构系统的适应性。本文针对可开闭式屋盖的同步运行控制作了详细的分析,PID全闭环控制大大提高了屋盖运行的同步精度,最大程度保证各驱动结构的协调一致性。
1 机械结构简介

图1 机械结构示意图
浙江省绍兴县体育场为目前国内可开启面积最大的开闭式体育场,活动屋盖由两片单元组成图1,开启面积12 350 m2,总跨度120 m。单片活动屋盖重约550 T(不含膜结构),行程60 m,移动速度1~3 m/min(可调节),打开或闭合时间最快为20 min。采用卷扬机和摩擦轮自驱动相结合的驱动方式,配备4台130T大型卷扬机,12台驱动台车,16台从动台车闭环驱动。每片屋盖用法兰盘固接于14个台车上,沿2条圆弧轨道牵引移动,其中6台驱动台车,8台从动台车。
2 控制系统结构简介
电气控制系统见图2设有一个控制中心(主站),4台卷扬机从站,12台主动台车从站,16台被动台车从站。主站采用西门子S7-300[1]可编程控制器(PLC),驱动从站采用西门子S7-200[2]可编程控制器(PLC),主站与各从站采用PROFIBUS-DP现场总线通讯协议进行通讯。每台卷扬机上各装有一个绝对值编码器,每片活动屋盖两侧也各装有一个绝对值编码器,都支持PROFIBUS总线协议,加上8个绝对值编码器计量从站,总共为40个从站。主站与标准DP从站通信的组态可参考文献[3-4]。卷扬机电机与主动台车电机都由变频器驱动。

图2 控制系统结构示意图
3 PLC控制流程方框图(图3)

图3 PLC控制流程方框图
4 同步运行控制原理
首先计算或测量好卷扬机编码器旋转单圈所对应屋盖行走的基准距离S1与台车编码器旋转单圈所对应屋盖行走的基准距离S2。计算方法可通过机械传动比得出,测量方法是用皮尺到现场进行实物测量。S1、S2作为卷扬机与台车的行程校准值,至关重要,S1、S2的精确与否直接影响到全局同步。
活动屋盖运行时实际距离计算:设定东北侧卷扬机编码器当前值为H1,台车编码器当前值为H5;西北侧卷扬机编码器当前值为H2,台车编码器当前值为H6;东南侧卷扬机编码器当前值为H3,台车编码器当前值为H7;西南侧卷扬机编码器当前值为H4,台车编码器当前值为H8。绝对值编码器转一圈计4 096个数,那么东北侧卷扬机钢丝绳行走的实际距离L1=S1÷4 096×H1,台车行走的实际距离L5=S2÷4 096×H5;西北侧卷扬机钢丝绳行走的实际距离L2=S1÷4 096×H2,台车行走的实际距离L6=S2÷4 096×H6;东南侧卷扬机钢丝绳行走的实际距离L3=S1÷4 096×H3,台车行走的实际距离L7=S2÷4 096×H7;西南侧卷扬机钢丝绳行走的实际距离L4=S1÷4 096×H4,台车行走的实际距离L8=S2÷4 096×H8。
卷扬机绝对值编码器与台车绝对值编码器都是用来测量活动屋盖行走的实际距离的。台车绝对值编码器是安装在台车驱动轮上的,由于轨道很难做到完全平整,加上日夜四季温差大,钢结构本身型变比较大,台车运行当中,驱动轮有腾空打滑的现象,而且屋盖跨度大,台车也不是完全沿直线行走,所以台车绝对值编码器所测量的数据不一定准确,只能用来参考。卷扬机绝对值编码器是安装在卷扬机驱动齿轮上的,由于是齿轮传动,不存在打滑,基本不受外界因素影响,卷扬机钢丝绳行走的实际距离就是活动屋盖行走的实际距离,钢丝绳的延伸系数为1‰,经过多次运行,钢丝绳张紧后,延伸系数可以忽略不计,所以卷扬机绝对值编码器测量的数据是非常精确的,可以直接作为活动屋盖的行走距离计量。PLC程序里任何计算都是以卷扬机绝对值编码器测量的数据为基准的。
每片屋盖两侧牵引卷扬机分别用一个PID控制器来微调其运行速度,利用PID控制器微调运行速度是在每台牵引卷扬机与每台主动台车的固定运行速度(快速V1:3 000 mm/min,慢速V2:1 500 mm/min)基础上加上或者减去一个微调速度U(0 mm/min~200 mm/min)。
4.1 卷扬机与台车同步控制
卷扬机与台车快速或者慢速固定运行速度设定值都相同。每片屋盖两侧微调运行速度分别用一个PID控制器来控制,即用到了4个PID控制器,设定东北侧PID控制器微调速度为U1,西北侧PID控制器微调速度为U2,东南侧PID控制器微调速度为U3,西南侧PID控制器微调速度为U4。那么屋盖正常运行时,东北侧卷扬机与台车快速运行速度为:V1+U1,慢速运行速度为:V2+U1;西北侧卷扬机与台车快速运行速度为:V1+U2,慢速运行速度为:V2+U2;东南侧卷扬机与台车快速运行速度为:V1+U3,慢速运行速度为:V2+U3;西南侧卷扬机与台车快速运行速度为:V1+U4,慢速运行速度为:V2+U4。
PID控制器微调时同一侧卷扬机与台车是同时进行的,同一侧卷扬机与台车所调节的微调速度、运行速度均一致,从而实现卷扬机与台车同步运行。
4.2 活动屋盖两侧同步控制
活动屋盖两侧的同步控制同样是采用西门子PLC内部PID控制器来实现,利用绝对值编码器反馈的实际数据与理论数据进行比较,即闭环控制(见图4)。
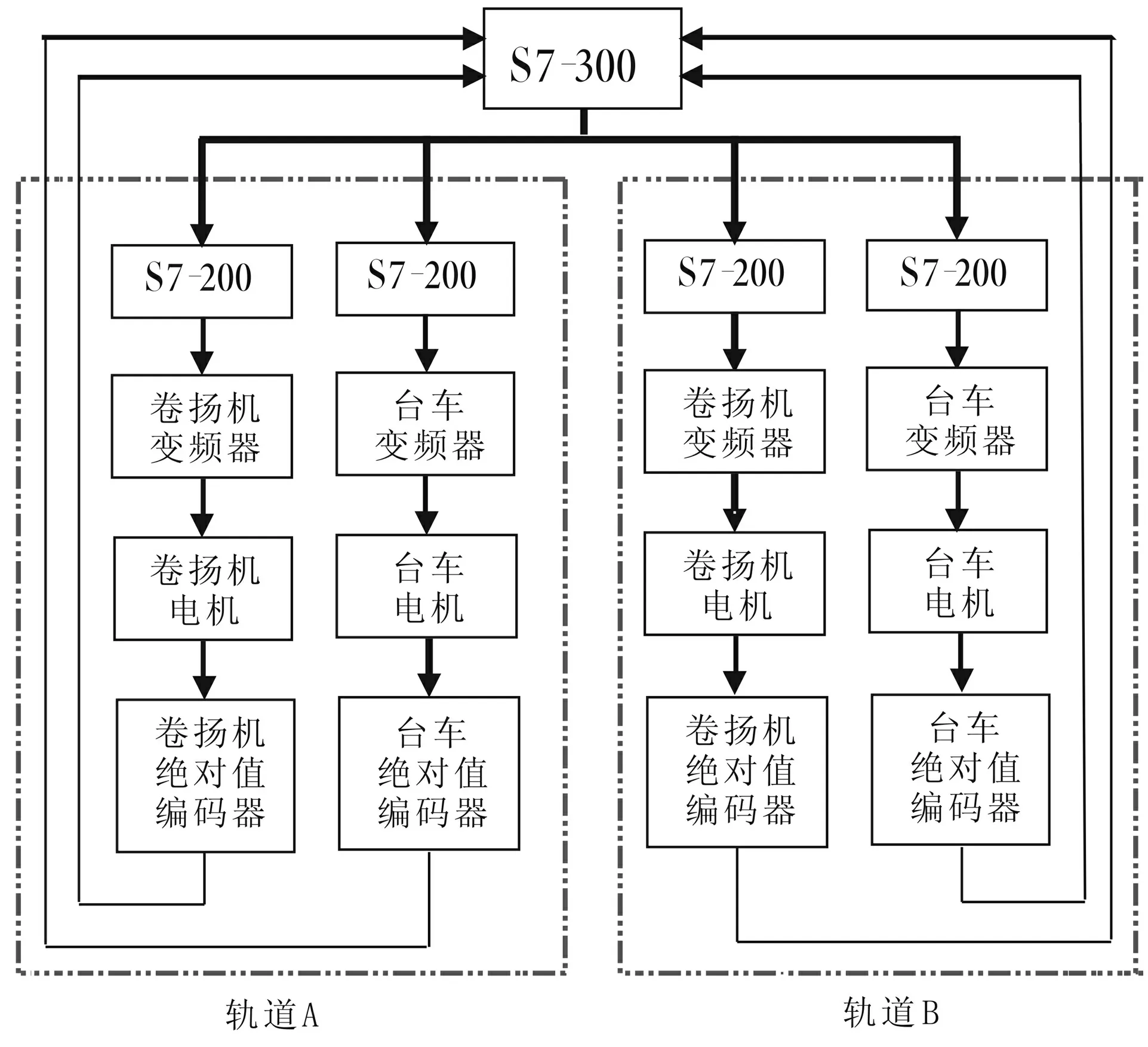
图4 闭环控制方框图
屋盖闭合时编码器加计数,卷扬机钢丝绳当前行走的实际距离作为PID控制器的反馈值;屋盖开始移动时开始加计时,通过给定的固定运行速度计算出屋盖在当前运行时间段内所移动的理论距离(200 ms更新一次),把该理论距离作为PID控制器的设定值。PID控制器对设定值与反馈值进行比较计算,得出一个误差值,当设定值大于反馈值时(即活动屋盖在当前运行时间段内所移动的实际距离未达到理论距离),误差值为正,PID控制器根据正误差值的大小结合比例、微分、积分设定参数(比例系数0.5,微分时间6 s,积分时间1.2 s)输出一个合适的正百分比a%,程序里利用该正百分比计算出需要微调的速度(200 mm/min* a%);
当设定值小于反馈值时(即活动屋盖在当前运行时间段内所移动的实际距离超过了理论距离),误差值为负,PID控制器根据负误差值的大小结合比例、微分、积分设定参数(比例系数0.5,微分时间6 s,积分时间1.2 s)输出一个合适的负百分比-a%,程序里利用该负百分比计算出需要微调的速度(200 mm/min*-a%),同时程序里把给定的固定运行速度和微调速度都换算为对应的频率,再用换算好的固定频率加上微调频率就是屋盖当前的运行频率,最终给到变频器。
屋盖开启时编码器减计数,卷扬机钢丝绳当前行走的实际距离作为PID控制器的设定值;屋盖开始移动时开始减计时(即在闭合时所累加的时间基础上减去开启时所用的时间),通过给定的运行速度计算出屋盖在当前运行时间段内所移动的理论距离(200 ms更新一次),把该理论距离作为PID控制器的反馈值。即屋盖开启时PID控制器的设定值与反馈值刚好与闭合时相反,控制方法相同。
另外PID控制器设有死区(±10 mm),也就是说设定值与反馈值的误差为±10 mm以内时,PID控制器不工作,输出百分比为0,不作微调,以减少系统频繁调整次数。
活动屋盖两侧运行时间是相同的,给定的固定运行速度也是相同的,那么相同时间段内所移动的理论距离也是相同的,实际移动距离如果超过或不够理论距离,PID控制器就会作微调,单片屋盖两侧微调速度可能不一致,根据运行工况会实时变化,从而实现活动屋盖两侧同步运行。
4.3 频率换算
因驱动电机都是变频器控制,给定的固定速度与微调速度都需根据卷扬机电机与编码器的机械传动比、台车电机与编码器的机械传动比换算为对应的频率再给定到各个从站的变频器里。
因为是以卷扬机的绝对值编码器测量的数据为基准,单片屋盖同一侧的台车电机微调百分比与卷扬机电机微调百分比相同,由于卷扬机电机与编码器的机械传动比和台车电机与编码器的机械传动比不同,相同的微调百分比,但换算出来的对应频率有所不同,最终是要保证卷扬机与台车的运行速度一致。
5 结束语
通过PLC内部PID控制器结合绝对值编码器反馈值的闭环控制,控制方式实用,活动屋盖运行平稳,同步运行效果非常理想,每片活动屋盖两侧实际行走距离误差可以控制在30 mm以内。
[1] 廖常初.S7-300/400 PLC应用技术[M].北京:机械工业出版社,2011.
[2] 廖常初.S7-200 PLC编程及应用[M].北京:机械工业出版社,2005.
[3] 廖常初.西门子人机界面(触摸屏)组态与应用技术[M]. 北京:机械工业出版社,2008.
[4] 廖常初.西门子工业通信网络组态编程与故障诊断[M]. 北京:机械工业出版社,2009.
Design of Synchronous Operation Control for Retractable Roofs of Large Stadiums
CHEN Xiong
(Department of Construction Robot Engineering, Zhejiang Jinggong Steel Structure Co., Ltd., Shanghai 200233, China)
This paper describes the synchronous control of the winch and driving trolley as well as the synchronous control over the two sides of the monolithic roof during operation of the retractable roof of a stadium. Synchronous control is realized through the internal PID controller in the Siemens PLC to achieve ideal synchronous operation.
synchronous control; programmable controller; field bus; PID controller; absolute value encoder
10.3969/j.issn.1000-3886.2015.05.035
TP272/278
A
1000-3886(2015)05-0108-03
陈雄(1980-),男,湖北黄石人,本科,电气工程师,主要从事各种机械设备的控制系统研究。
定稿日期: 2014-11-07
