船舶电力推进感应电机矢量控制系统仿真研究
2015-05-04勇娅询刘维亭魏海峰陈源江苏科技大学电子信息学院江苏镇江212003
勇娅询, 刘维亭, 魏海峰, 陈源(江苏科技大学 电子信息学院,江苏 镇江 212003)
船舶电力推进感应电机矢量控制系统仿真研究
勇娅询, 刘维亭, 魏海峰, 陈源
(江苏科技大学 电子信息学院,江苏 镇江 212003)
分析了船舶电力推进的特点和感应电机的数学模型,建立了以电压空间矢量控制理论为核心的感应电机矢量控制系统仿真模型,试验了带螺旋桨负载时,矢量控制的调速性能。仿真结果表明,感应电机矢量控制调速性能良好,适用于船舶电力推进系统。
电力推进;感应电机;矢量控制;螺旋桨;调速性能
0 引 言
船舶电力推进系统虽有近百年历史,却因为各种制约因素,发展缓慢,大多数只应用在特种船舶上。随着供电系统、推进电机和微电子及信息技术的迅猛发展,船舶电力推进也得到了大力的发展。同传统的机械推进方式相比,采用电力推进系统的船舶在经济性、船舶操纵性、降低振动噪声、灵活空间配置和安全可靠性等方面具有明显的优势[1]。
推进电动机在船舶电力推进系统设计中处于核心位置,推进电机按种类可分为直流电机和交流电机,而交流电机又可分为同步电机和异步(感应)电机。同步电机可以通过励磁灵活调节功率因数,异步电机的功率因数不可调。因为同步电机有励磁绕组和滑环,所以需要操作者有较高的水平来控制励磁,此外,和异步电机的免维护相比,同步电机维护工作量较大,而且异步电机可以通过改变输入交流电的频率改变电动机转速,所以,作为电动机时,大多选择异步电机。
电动机的转速控制是由变频器来实现的。变频器由结构不同可分为交-直-交变频器和交-交变频器。在交-直-交变频器中,按中间储能环节所用的是电容还是电感,又分为电压型和电流型变频器[2]。由于交-直-交变频器的结构简单、且具有频率调节范围宽、功率因素高、电动机匹配无要求等优点,目前,在船舶电力推进系统中,普遍采用的是电压型的交-直-交变频器。采用的控制方法主要有PWM(脉宽调制)方式和多电平控制方式[3]。其中,正弦脉宽调制(SPWM)变压变频控制方式在技术上日益成熟,在各种船舶电力推进系统中也得到广泛应用。基于上述内容,分析了螺旋桨负载的工作特性,建立了船舶电力推进感应电机矢量控制仿真模型,并对仿真结果进行了深入研究。
1 船舶电力推进系统
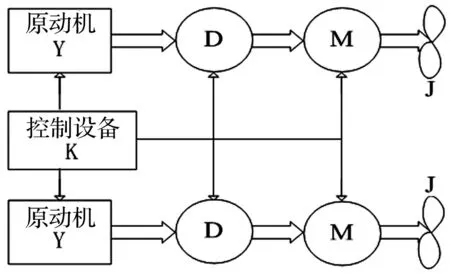
图1 船舶电力推进系统
船舶电力推进就是采用电动机驱动螺旋桨来推进船舶运行的一种推进方式。而采用电力推进装置的船舶称为电力推进船舶或电动船。常用船舶电力推进装置一般由以下几部分组成:(1) 螺旋桨J:船舶推进器一般都采用螺旋桨,因为其效率高,尺寸较小。(2) 电动机M:可以采用直流他励电动机或交流同步电动机、异步电动机、同步异步电动机等。(3) 电动发电机D:同时具有发电机和电动机两种功能,而仅对于发电机,可以采用直流他励、差复励发电机或交流同步发电机。(4) 原动机Y:可以采用柴油机、汽轮机或燃气轮机。目前多采用高速或中速柴油机,大功率时多用汽轮机或燃气轮机。(5) 控制调节设备K。其结构如图1所示。
2 异步电机矢量控制及螺旋桨模型
2.1 异步电机数学模型
交流异步电动机是由定子、转子和它们之间的气隙构成的一种能够将电能转化为机械能的电力拖动装置。
对异步电机的数学模型进行研究时,可以忽略一些微小影响的参数,假设把空间谐波、磁路饱和和铁芯的损耗省略,把各个绕组相互间的互感及自感也认为是恒定不变的,而且不考虑频率以及温度的变化对绕组阻值的影响[4]。
交流电机的数学模型与直流电机的数学模型作比较,更为复杂。如果能把交流电机模型等效变成类似直流电机的形式,就可以简化对电机的分析及控制,由此得到坐标变换,其中不同电机模型的等效需遵守磁动势在不同坐标条件下不变的原则。
异步电机在旋转坐标系(dq坐标系)下的数学模型。
电压方程:
(1)
式(1)中:Lm为同轴的定子和转子等效绕组之间产生的互感;Ls,
Lr分别为定子及转子等效两相绕组各自的自感;ωdqr,ωdqs为电机的同步角速度以及转差角速度。
磁链方程:
(2)
转矩方程:
Te=npLm(isqird-isdirq)
(3)
2.2 电压空间矢量控制系统
异步电机通过坐标变换能够等效地看作成直流电机,于是,利用直流电机的控制方式方法,获得直流电机的控制变量,再经过坐标变换,就能够控制异步电机。电压空间矢量控制系统的原理图[5],如图2所示。

图2 电压空间矢量控制系统的原理图
2.3 螺旋桨负载的工作特性
由于螺旋桨的特殊结构和较高的工作效率,其作为船舶推进器已经得到广泛的应用。在船舶航行过程中,螺旋桨在水中回转会产生推力t,推动船舶运行时,推力与船舶运行方向一致,船舶后退时,就产生负推力。在水中回转时,螺旋桨还会产生扭矩q,其方向和螺旋桨的回转方向相反[6]。
螺旋桨推力t可以表示为:
t=Ktρn2D4
(4)
螺旋桨扭矩q可以表示为:
q=Kqρn2D5
(5)
式(4)和(5)中Kt,Kq为螺旋桨推力与螺旋桨扭矩系数,二者都是进速比J的函数;ρ为海水密度,单位kg/m3;n为螺旋桨的速度,单位r/s;D为螺旋桨的直径,单位m。
在现实应用中螺旋桨是与船体相连接的,船舶在水中运行时,船舶对螺旋桨产生的伴流通常有三种:摩擦,位差以及波浪伴流。
令伴流速度为:
u=V-Vp
(6)
伴流系数为:
ω=u/V=1-Vp/V
(7)
相对于水螺旋桨的速度为:
VP=V(1-ω)
(8)
螺旋桨的进速比为:
(9)
螺旋桨的实际有效推力就可表示为:
PE=P(1-t)
(10)
式(6)到(10)中V为流过螺旋桨水的速度,Vp为螺旋桨向前的速度。
在实际船舶航行中,除了需要考虑船体和螺旋桨间的相互作用外,还要考虑船舶的阻力特性,通过阻力曲线随着船航速的变化,可以得出水对船体的阻力与船航速的平方成正比[7],即:
R=KRV2
(11)
式(11)中R为水对船体的阻力,KR阻力系数。
3 仿真系统构建
3.1 坐标变换模型
坐标变换包括3/2变换、2s/2r变换及2r/2s变换,变换结构模型如图3~5所示[8]。
图3 3/2变换模型

图4 2s/2r变换模型

图5 2r/2s变换模型
3.2 PI调节器模型
转速、转矩、磁链PI调节器的模型结构基本相似,不同点在于设置的参数,其模型结构主要包括比例部分、限幅环节和积分部分,转速PI调节器的模型如图6所示。

图6 转速PI调节器模型
3.3 转子磁链观测模型
磁链观测模型如图7所示,由于矢量控制过程中存在坐标变换,所以必须要获得静止与旋转坐标间的夹角[9]。

图7 转子磁链观测器模型

图8 SVPWM总仿真模型
3.4 SVPWM模型
SVPWM总仿真模型如图8所示,由扇区判断模型,电压矢量的作用时间模型,逆变器开关时间模型,PWM波形的生成模型这几部分组成。
3.5 电压空间矢量控制系统仿真结果
把矢量控制系统模型与螺旋桨模型结合起来,组成船舶电力推进电压空间矢量控制系统仿真模型,其中选择一台37 kW异步电机作为电机,其参数如下:转子电阻Rr=0.050 3 Ω;定子电阻Rs=0.082 33 Ω;互感Lm=0.027 11 H;电压UN=400 V;频率f=50 Hz;转动惯量J=0.37 kg·m2;极对数pn=2。给定转速为175 r/min,仿真结果如下:
图9是电压空间矢量控制感应电机的相电流仿真波形,电流基本保持正弦波,在刚启动时,电机电流峰值大约达到420 A,电流脉动较大,经过0.3 s后基本稳定在100 A,所以当电机达到稳定状态后,电流幅值和频率都可以保持稳定,电流对电网也不存在较大的冲击。

图9 电机相电流
图10是电压空间矢量控制感应电机的转速仿真波形,系统的响应速度较快,电机转速从0上升到给定值175 r/min所花的时间约为0.18 s,之后转速保持稳定,上升曲线较为平滑。
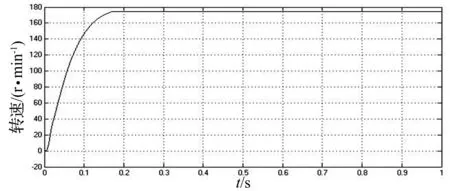
图10 电机转速
图11是电压空间矢量控制感应电机的转矩仿真波形,因为带有负载,电机在刚启动时,最大扭矩接近245 N·m,随着系统运行,转矩趋于稳定,约为225 N·m。电机转矩在启动到稳定间跳变幅度较小。

图11 电机转矩
图12是电压空间矢量控制感应电机的负载,螺旋桨的扭矩仿真波形,当电机的转速逐渐趋于稳定状态时,螺旋桨的扭矩也达到稳定,结合图11和图12可得,稳定状态时电机转矩值和螺旋桨的扭矩值接近相等。

图12 螺旋桨扭矩
4 结束语
在分析电力推进的基础上,采用感应电机矢量控制来作为电力推进的驱动装置,并对船舶螺旋桨负载进行了研究,最后用MATLAB对其进行了仿真,分析了电压空间矢量控制系统在带螺旋桨负载后的电流,速度和转矩特性。仿真结果表明电压空间矢量控制感应电机的电力推进系统性能良好,运行稳定,可以满足船舶对电力推进的需求。
[1] 云峻峰,黄仁和,赵建华.现代舰船电力推进设计走向[J].舰船科学技术,2003,25(1):3-8.
[2] 聂延生,黄鹏程,李伟光,等.船舶电力推进系统控制方法[J].航海技术,2002,24(6):38-39.
[3] 李楠.现代船舶电力推进系统的发展[J].中国水运,2009,9(1):1-2.[4] 尚敬.基于MATLAB/Simulink的异步电动机仿真模型分析[J].电机技术,2002,23(2):17-19.
[5] 余秋实.异步电机SVPWM的矢量控制系统研究[D].重庆:重庆大学,2010.
[6] A L ORILLE, G M A SOWILAM. Application of neural network for direct torque control[J]. computers and Industrial Engineering, 1999,37(5):391-394.
[7] J RODRIGUEZ, J PONTT, C A SILVA, et al.Predictive current control of a voltage source inverter. [J].IEEE Transactions on Power Electronics, 2007,54(7):495-503.
[8] 邵杰.基于MATLAB/Simulink异步电机矢量控制系统仿真[J].自动化技术与应用. 2009, 28(3):73-76.
[9] 洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真[M].北京:机械工业出版社,2006.
A Simulation Study on the Vector Control System of Marine Electric Propulsion Induction Motors
YONG Ya-xun, LIU Wei-ting, WEI Hai-feng, CHEN Yuan
(College of Electric Information, Jiangsu University of Science and Technology, Zhenjiang Jiangsu 212003, China)
This paper analyzes the characteristics of marine electric propulsion and the mathematical model of the induction motor, establishes a simulation model for the induction motor vector control system based on the voltage space vector control theory, and tests the speed control performance of vector control under propeller load. Simulation results show that the induction motor vector control has a good speed control performance and is suitable for marine electric propulsion systems.
electric propulsion; induction motor; vector control; propeller;speed control performance
工业和信息化部高技术船舶科研项目(“船舶综合电力推进系统工程化技术研究”)
10.3969/j.issn.1000-3886.2015.05.004
TM343
A
1000-3886(2015)05-0010-03
勇娅询(1991-),女,江苏宜兴人,硕士生,研究方向:船舶电气控制。 刘维亭(1966-),男,黑龙江牡丹江人,博士,教授,研究方向:船舶电气控制。
定稿日期: 2014-08-14
