视频监控重点区域智能分析报警系统的设计与实现
2015-04-30韩胜杰
韩胜杰
摘要:文章立足于传统视频监控系统中运动目标跟踪的缺陷,有针对性地提出了在Mean shift算法中引入Kalman滤波器的运动目标跟踪新方法,从而能够有效弥补在相似干扰物问题以及大面积遮挡问题中Mean shift算法的不足,同时在软件设计方面应用多线程技术。将该方法应用在了实际智能分析报警系统中,验证了运动目标跟踪实现方案的实时性和有效性。
关键词:视频监控重点区域;智能分析报警系统;运动目标跟踪;Kalman滤波;多线程技术 文献标识码:A
中图分类号:TP311 文章编号:1009-2374(2015)16-0018-02 DOI:10.13535/j.cnki.11-4406/n.2015.16.009
计算机视觉领域在近几年来的一个新兴的研究方向就是智能化视频监控系统,这一技术包括了行为理解及描述、目标分类、运动目标跟踪以及运动目标检测等各方面的内容,因此其极具挑战性。现在视觉监视系统的技术水平变得越来越高,而且硬件设备成本开始不断的下降,因此现在的监控系统开始变得越来越普及,在车站、机场、超级市场、宾馆以及银行等各个公众场所得到了广泛的应用,并且有效地保障了公共领域的安全性。
1 智能分析报警系统的设计思路研究
监测并且跟踪在视频监控中重点区域中活动的各种运动目标,同时还要采用自动行为分析的方式对其产生的事件进行分析,这就是智能分析报警系统的主要功能。
1.1 硬件结构的设计
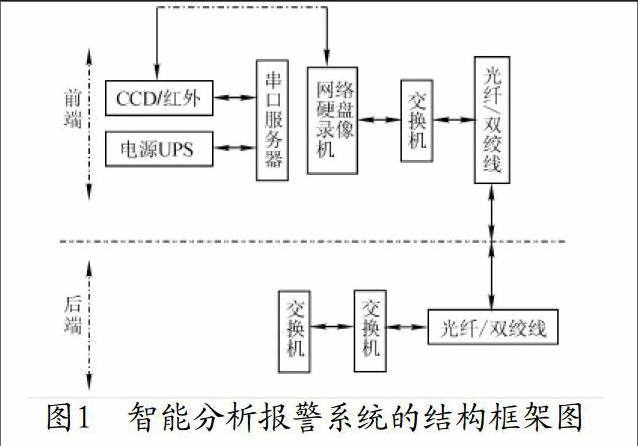
智能分析报警系统一共包括了三个部分,即显控设备、传输设备以及监控设备等。其中可见光CCD摄像机组成了监控设备;以现场不同的情况为根据,可以将传输设备划分为双绞线以及光纤两种传输方式;显控设备一共包括两个部分,也就是计算机以及监视器。智能分析报警系统可以划分为两个部分,即线控设备和监控设备,而所谓的前端主要指的是监控设备,所谓的后端主要指的是线控设备。图1是整个智能分析报警系统的结构框架图:
1.2 系统功能模块的功能分析
1.2.1 目标检测模块的功能分析:分析在视频监控画面当中运动的各种物体,将背景分离,同时进行有效的检测,并且采用黄色矩形框的方式将运动物体标出来。上述是目标检测模块的主要功能。
1.2.2 目标跟踪模块的功能:对在视频监控当中出现的各种运动物体进行有效以及准确的跟踪是目标跟踪模块的主要功能。
1.2.3 警戒区域、警戒线规则设置模块的功能:能够将警戒区以及警戒线设置在视频监控重点区域当中是警戒区域、警戒线规则设置模块的主要功能。
1.2.4 界线检测及报警模块:检测监控画面重点区域中警戒线触发到的各种运动目标是界线检测及报警模块的主要功能,同时将触发报警规则时的报警原因以及序列号及时地显示在界面当中,而且还能够对文件名等信息参数进行保存。
1.2.5 警帧反馈模块的功能:警帧反馈模块的主要功能为让用户利用对界面列表中相应记录的点击,从而能够对警报时的记录图像进行查看。
1.2.6 区域检测及报警模块的功能:检测各种运动目标是区域检测及报警模块的主要功能,同时将触发报警规则时的报警原因以及序列号及时地显示在界面当中,并且对文件名等信息参数进行保存。
1.3 智能分析报警系统的工作流程设计
首先系统要检测和跟踪在视频中特定区域当中进入的各种运动目标,随后移动目标所产生的事件为根据,对其行为进行自动的分析,并且将报警信号产生,同时还可以将产生报警信号的时间保存在上位机当中。这样在事后就能够通过对存储报警事件的类型进行利用,对保存下来的各种报警图片以及事件等进行调用。
2 智能分析报警系统的技术研究
2.1 在Mean shift算法引入Kalman滤波器
Mean shift方法在对目标的特征进行描述的时候采用的和概率密度,随后通过对均值偏移方法的利用,就可以将目标的位置快速地定位出来。这种方法具有很高的抗干扰能力,而且能够与各种情况充分的相适应,同时还具有非常快的计算速度。现在Mean shift方法已经在很多实际的系统当中得到了广泛的应用,其具有很小的计算量以及非常快的计算速度,所以在具有较高实时性要求的系统当中具有很高的适应性。然而,Mean shift算法也具有一些不足,比如Mean shift算法很难随着目标大小的变化进行自适应调整,而且在对目标特征进行提取的过程中存在着较大的不足,并且很难与范围大的遮挡相适应。虽然面对部分遮挡和干扰Mean shift算法会表现出较差的敏感性,但是Mean shift算法会由于长时间的遮挡而在遮挡物周围收敛,最终会将跟踪的目标丢失,因此,需要在Mean shift算法中引入Kalman滤波器。
Kalman预测器可以在信号处理过程中保证时变估计的正常运用。因为对递归技术进行了使用,不需要存储所有过去的测量值,所以在计算机对信号进行实时处理时非常方便,这是Kalman预测器最为主要的特点。
2.2 多线程技术的应用
可以利用SetTimer函数在Windows中将一个计时器分配给应用程序,如果在这一个时间间隔进行指定之后,Windows系统就会将一条WM_TIMER消息每隔指定的时间发送给应用,这样就能够保证许多与时间相关的动作可以在应用程序中实现。
在这里必须要强调的是,WM_TIMER消息这种由系统发给应用程序的消息并不具备异步的特点,会在常规的消息队列中放置这条消息,同时还会与其他消息一起排序。这样,就算是在SetTimer()进行调用时对1000ms的时间间隔进行了设定,然而却不会保证每隔1s应用程序就能够将一条WM_TIMER消息接收到。一旦另一个程序具有大于1s的忙碌时间,那么在这个时间段中应用程序就无法接收任何WM_TIMER消息。从这里我们可以发现,这种情况的存在会严重影响到一部分需要精确时间间隔的应用。所以采用多线程技术在软件设计方面能够实时检测与跟踪多个移动目标的速度得以加快,并且使系统的分析与识别效率得到极大的提升。
3 智能分析报警系统的实验结论
为了能够对算法的有效性进行更好的验证,在某房间内跟踪系统当中的运动目标,同时为了研究的方便,在本次研究中将指定的跟踪目标选定为笔筒。在实验的过程中,在遮挡住运动目标的情况下,目标也不会被系统丢失,因此其具有非常理想的跟踪效果。利用智能报警分析系统跟踪普通视频跟踪系统当中的运动的笔筒,从而对所用算法的时效性和准确性进行了有效的验证,证明智能分析报警系统的实用价值较强。
4 结语
本文对上位机软件跟踪运动目标的方案进行了设计,并且在Mean shift算法引入了Kalman滤波器,这样就能够在视频中跟踪任意的目标。现在在智能分析报警系统中已经成功地应用了该跟踪方案,而且在测试评比当中也能够与智能分析报警系统的跟踪目标相适应,同时能够有效地保证很多功能的实现,因此智能分析报警系统可以将大量的人员开支节省下来。本文使用的实现方案的通用性很强,能够使视频跟踪对算法的实时性以及有效性的需求得到充分的满足。
参考文献
[1] 张海峰.视频智能分析系统——智能交通必备的管理工具[J].智能建筑与城市信息,2012,(9).
[2] 陈晓曼,刘桂雄,杨艳娟.全电动注塑机智能分析与控制平台的设计及实现[J].制造业自动化,2011,(15).
[3] 印骏,吴文芳.大型人流通道高清图像监控和智能分析应用[J].低压电器,2012,(24).
[4] 陈明,刘彦,刘福利,魏莉.平面组合机构智能分析软件的研究与开发[J].机械工程师,2013,(4).
(责任编辑:周 琼)
