波动鳍仿生机器鱼研究进展与分析★
2015-04-27徐飞然王光明谭晓朋
徐飞然,王光明,谭晓朋
(国防科技大学 机电工程与自动化学院,湖南 长沙 410073)
波动鳍仿生机器鱼研究进展与分析★
徐飞然,王光明,谭晓朋
(国防科技大学 机电工程与自动化学院,湖南 长沙 410073)
摘 要:依靠鳍的波动实现推进的中央鳍/对鳍(Median and/or Paired Fin, MPF)模式鱼类在运动过程中身体可以不发生变形而获得推力,具有高效率,高稳定性和强机动的游动特点,对水下推进器的研发具有极大的参考价值,近年来在加强海洋资源开发力度和加快军事装备革新步伐的号召下,波动鳍仿生机器鱼受到越来越多科研人员的关注。 首先对波动鳍游动鱼类进行简要介绍和分类,从机理研究和仿鱼样机两个方面对其进行综述,然后对相关的关键技术进行了分析和讨论。
关键词:波动鳍;仿生机器鱼;水下机器人
本文引用格式:徐飞然,王光明,谭晓朋.波动鳍仿生机器鱼研究进展与分析[J].新型工业化,2015,5(4):3-10
0 引言
海洋不仅蕴含大量生态资源,同时也是国际交通的主要通道和军事发展的战略空间,21世纪以来,占据海洋技术优势和增强海军阵容一直是世界各国关注的焦点[1]。近些年在执行海洋搜寻、水底打捞、海底管道检测和矿产勘探等多种人工难以完成的高难度任务方面对水下机器人提出自治性、稳定性和隐蔽性等要求[2],然而,目前的水下机器人大多以螺旋桨推进为主,在推进时产生较大噪声和尾迹,它的直线推进和变向机动分别需要桨和舵来执行,控制难度大,灵活性差[3],因此螺旋桨式水下机器人越来越难以满足目前工程应用的需要。
鱼类在水下经历了漫长优胜劣汰的进化,拥有独特的形态结构与运动方式,具有优越的水下生存能力。其中中央鳍/对鳍(Median and/or Paired Fin, MPF)模式鱼类依靠分布在身体周围的波动鳍的波动,精确控制周围流场获得自身运动的推力,在游动过程中身体可以不发生弯曲形变,仅通过波动鳍的灵活变化就能够实现各种机动性,运行平稳,推进效率高,不会产生痕迹明显的游动尾迹,对流场环境干扰小,尤其适合于特殊造型的执行隐蔽任务的低速小型水下航行器,具有优越的工程参考价值。
随着仿生学的迅速发展,波动鳍的研究不断深入,从波动鳍推进机理和相应典型的仿鱼样机进行综述,并对未来发展的关键技术进行分析。
1 波动鳍的特点与分类
波动鳍由鳍条和鳍膜组成,在运动过程中至少产生一个完整的行波,通过调节波幅、波频、波速和行波传递方向来改变推进力的大小和方向,能够迅速完成转弯、俯仰和跳跃等复杂动作,如果将波动s鳍鱼类按照拥有的波动鳍个数进行划分,可分为对鳍、单鳍和复合鳍模式,主要科目分类如图1所示。
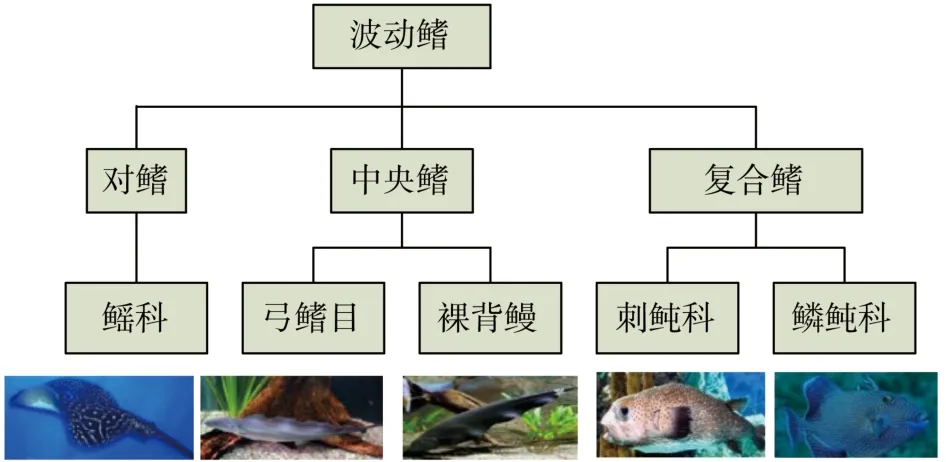
图1 波动鳍成员分类
根据模仿对象的特点,仿生波动鳍主要通过对人工鳍条的姿态控制来带动鳍面运动得到推进行波。
2 推进机理研究现状
推进机理的研究是认知鱼类运动精髓的基本手段,也是开展仿生机器鱼系统研发的首要任务之一,目前波动鳍理论研究主要包括数学模型研究、实验观察和计算流体力学研究(CFD)。
2.1数学模型研究
数学模型的研究主要给出各波动参数、结构参数与推进力之间的关系。Lighthill与Blake应用扩展的大摆幅细长体理论来研究鳞鲀科、裸背鳗科和弓鳍目科波动鳍与身体的相互作用对推进性能的影响关系[5];Danie通过联合叶片元理论与波动板理论探究鳐科模式不同鳍的形状和行波参数下的不同推进效应[6]。Rahman等建立单波动长鳍6自由度运动方程,得到了模型运动产生的流体力和力矩的表达式[7];Shahin对刀鱼臀鳍进行建模,得到了首尾相向传波运动时,波动产生的推力表达式[8];王硕基于设计的波动鳍装置建模,得到了运动学和动力学模型,并得到每一运动周期内产生的平均波动推力[9];谢海斌建立理想波动鳍模型,并给出了不同方向力和力矩的解析表达式[10];高帅通过Navier-Stokes方程联立鳐鱼胸鳍物理学、运动学和动力学模型,理论阐述鳐鱼胸鳍的波动推进基本原理[11]。
2.2实验研究
实验研究包括样本观测和样机试验。中国国防科技大学采用数字摄像机分别对弓鳍目“尼罗河魔鬼”鱼和“鸳鸯炮弹”鱼在不同运动状态下身体形态特征进行观察,并对波动鳍波速、波长、波幅与游动速度之间的相关性进行了研究[12-13]。Blevins利用高速摄影技术对鳐鱼在实现加速和急停时胸鳍表现出的不同状态进行观察,指出加速主要靠增加波动频率来实现,急停时胸鳍迅速向侧向凹变,并对地场特性进行了研究[14]。Oscar M基于DPIV技术发现黑魔鬼刀鱼能够头尾同时对向传递行波,该效应能够实现自身迅速急停或横向运动来抵抗外界干扰[15],Izaak D利用同一技术发现在刀鱼波动臀鳍尖部脱落的涡流模型与鯵科鱼类尾鳍脱落的模型类似,倾斜的鳍条会影响到涡流管的连续性,从而影响推进效率[16]。
样机试验可以人为控制各运动参数来探究波动鳍推进的不同效果。美国霍普金斯大学利用刀鱼样机对首向单行波与首尾对向行波两种推进运动方式做实验比较,发现由首尾对向行波共同传递的推进方式能够通过控制两波相遇的位置来调节推进力的大小,具有比单行波推进方式更好的灵活性与稳定性[8]。伊朗Tabriz大学研究鳍条间的相位差、波数和波幅对推进速度的的影响情况,得出相位差和波数对运行速度影响较波幅明显,都呈现随数量值的增大载体运行速度先增后减的趋势[17]。Sfakiotakis利用两根鳍条、一张薄膜和两台电机组成的实验装置来系统探究不同鳍条结构参数、薄膜材料和运动参数对所需动力转矩的影响关系[18];刘芳芳基于样机实验发现波动频率对行波波幅,波长及波速的影响非常明显:波频增大,波幅和波长减小,波速增加[19]。国防科技大学系统阐述了波动鳍条结构,鳍面材料,摆动频率和波形数目对波动鳍推进效果的影响,其中摆动频率和幅度对推进速度和效率影响最大[20]。Chunlin Zhou将不同鳍条数目的波动鳍样机同时进行水下实验,并对得到的运行速度和推进效率测试结果进行比较分析,得出样机鳍条数目并不一定越多,推进效率就越高[21]。
2.3计算流体力学研究
CFD技术把空间连续的速度场和压力场用有限离散点的形式代替,按照一定规则建立场变量之间代数方程,求解场变量,形象揭示波动鳍水下动力参数间的变化关系[22],也是机理研究的重要手段之一。Lamas一直致力于CFD方法对波动鳍动力学特性的研究,建立起各运动参数与推进力之间的关系,指出波频、波幅和波长是影响动力学特性的主要参数,得到的分析结果与样机测试结果基本一致,同时指出矩形形状的波动鳍相比于三角形和月牙形具有更好的推进效果[23-24]。周晗基于CFD方法研究来流速度、波动频率和波幅等对波动鳍推力的影响,指出波动鳍推力约呈正弦规律变化,变化频率是波动频率的两倍,推力大小与波长呈非线性关系,与波频和波幅约成指数变化关系[25]。周扬基于CFD方法分别研究了鳐鱼胸鳍波频、波数和波幅对其达到稳定自主游动后的水动力学性能的影响[26]。章永华基于CFD技术发现在相同运动学参数下波动长鳍振幅从前往后保持不变的鱼鳍波动模式较振幅变化的模式能产生更大的推进力,游动稳定性更好[27],同时章永华在CFD环境下设置周期性前段摆动作为干扰,探究波动鳍应对干扰的能力,发现波动鳍可以对扰动所形成的反卡门涡街进行自动调制,并且能够从中获取能量来增强自身波动推进性能,获得的推进力随干扰源距离增大而减小,在同一距离条件下,随干扰源摆动的频率增大而减小,摆动幅度的增大而增大[28-29]。
3 仿鱼样机研究现状
1999年英国瓦特大学研制出人类第一台波动鳍装置,自此多种不同形态波动鳍样机相继产生,从目前各样机的结构形式划分,可以分为对鳍样机和中央鳍样机。
3.1对鳍模式样机现状
本世纪初,新加坡南洋理工大学机器貂鱼和日本大阪大学研制的多代机器鳐鱼是对鳍模式的典型代表,为后续深入研究做出了突出贡献,同时国内哈尔滨工业大学和智能材料波动鳍机器鱼也为机器鱼小型化和微型化提供了参考方案。
2013年中科院自动化研究所设计每侧10根鳍条的双波动对鳍样机,如图2(a)所示,可以实现前后转弯侧移运动,当频率为2.2Hz,摆幅为30°时,最大前进速度为370mm/s[30]。
2013年南京航空航天大学为仿生对象,设计了一个以黄貂鱼为蓝本的圆形波动鳍水下机器人,如图2(b)所示,将12个电机等角间距阵列在一块圆板上,每个电机独图2 中科院胸鳍样机和南京航空航天大学鳐科机器鱼立控制一根碳化物鳍条,协调控制各鳍条摆幅、频率和相位角实现持续正弦波式运动,经实验验证,在鳍条摆动频率为0.5Hz,波速为1,摆幅为30°时,达到最大速度为4.3cm/s,最大推力为102mN,并且该机器鱼能够实现迅速换向运动[31]。
2013年日本冈山大学研制的仿鳐科机器鱼,由12个左右对称独立控制的鳍条单元驱动,每个单元鳍条由一个伺服电机通过锥齿轮机构交错减速传递动力,如图3(a)所示,探索性研究了通过鳍条的特殊运动来实现机器鱼的下潜策略,并进行载体水下实验[32]。
2014年,哈尔滨工业大学设计的仿生鳐鱼由电机、减速器、同步带和偏心轮等机构组成,如图3(b)所示,每侧波动鳍具有8根鳍条,同时被共转轴的偏心轮驱动,可以通过调节偏心轮之间的相位差来改变运动波形数。进行了一系列前进、后退和转弯等水下实验,探讨了各运动参数对运行效果的影响[11]。

图2 中科院胸鳍样机和南京航空航天大学鳐科机器鱼

图3 冈山大学鳐科机器鱼和哈尔滨工业大学仿生鳐鱼
3.2中央鳍模式样机研究现状
2003年美国西北大学就设计了用于水下航行器的仿“黑魔鬼”鱼的带状波动长鳍装置,进而新加坡南洋理工大学相继设计了“NKF-I”和“NKF-II”刀鱼机器人样机,开启了中央鳍机器鱼研究的热潮。2011年美国西北大学与Kinea设计公司共同研发的刀鱼机器人“albiforns”,如图4所示,重2.3Kg,鳍长32.6cm,高3.37cm,波动鳍由32根不锈钢鳍条和合成弹力纤维薄膜组成,每根鳍条由一个伺服电机和一个片状“肌肉”板控制器驱动控制,电机通过齿轮传递转矩,每个“肌肉”机构负责信息交流和电机控制,通过CAN总线连接各“肌肉”控制器,实现总体协调控制, 实验发现当最大摆角为30°,频率为3Hz时,呈现两个完整推进波,达到26cm/s的最大速度[33]。
2011年西班牙Lamas为对鱼类不同游动模式下推进效率的比较研究,专门设计了一套装置模拟裸背鳗式鱼类波动,采用9根鳍条带动鳍面运动,如图5所示,并研究了各运动学参数对推进效率的影响[34]。

图4 美国西北大学刀鱼机器人
2011年伊朗Tabriz大学设计了能自主下潜导向的波动鳍刀鱼机器人,如图6所示,由一个浮力箱来下坠其运动机构,各有一个电机分别控制载体转向和下潜,提供推力的波动鳍根部有6个伺服电机,每个电机驱动一根曲轴状鳍条,通过协调控制电机的运行状态,使相邻鳍条呈现相位差式的摆动,波动鳍整体波动推进,研究了在不同驱动频率下,载体运行速度的变化情况,测得最大直线速度为23cm/s[17]。

图5 西班牙波动鳍样机模型

图6 Tabriz大学波动鳍样机模型

图7 希腊波动鳍实验样机
2013年,希腊Sfakiotakis等设计的波动长鳍装置,8台电机直线等距离分布,每台电机独立驱动控制一根鳍条,协同带动一张硅树脂柔性鳍膜波动,如图7所示,对样机的控制算法进行了研究,当鳍条摆幅角为31.3°,运动频率为1.5Hz时,达到最大0.67m/s的最大推进速度[35]。
国内对中央波动鳍研究进度几乎与国外同步,2009年国内浙江大学设计的柔性长鳍波动的仿刀鱼机器人,如图8所示,由一个伺服电机驱动一个曲柄摇杆机构,鳍面与摇杆(鳍条)粘结在一起,随着摇杆的摆动而波动,并且摇杆的摆动幅度可调,实验测试在频率为4Hz时,达到最大速度为0.25m/s[19]。
国防科技大学是国内最早开展波动长鳍研究的单位之一,相继设计出凸轮模式,舵机模式的仿生样机,并对其一系列控制策略和水下特性进行了研究。2010年研制的液压模式长背鳍样机,由电机驱动一个旋转式分流阀,在驱动阀路的作用下波动鳍有序摆动而形成波动鳍面[36],如图9所示。
2013年海军工程大学设计的扭波仿生推进实验装置,仿生长鳍包含97根不锈钢丝鳍条和天然橡胶鳍面,如图10所示,波动鳍高50mm,长808mm,实验模型有25个鳍条驱动单元,等间距分布,两端各安装一台低速电机,驱动各单元转动实现波动鳍扭动,经试验测得航速与扭动频率大约成正比,电机消耗功率与频率3次方大约成正比[37]。

图8 浙江大学波动鳍样机模型

图9 国防科大液压波动鳍样机

图10 海军工程大学波动鳍样机
4 关键技术分析
4.1波动推进机理研究
推进机理研究是实现波动鳍样机高效率、高速度和强机动性行为的理论基础。然而目前大多数的数学建模只针对于鱼类稳定直线巡航状态,对各种水下机动变化难以做准确解释;实验的观测主要完成各波动参数对波动鳍推进效果定性的描述,对一系列参数之间变化关系的量化研究有限;CFD技术的计算也是建立在对各边界条件和物性参数等准确把握的基础上来执行。优势互补,取长补短仍然是综合运用各研究方法的主要手段,推进机理研究的滞后是制约波动鳍仿生机器鱼发展的关键因素之一,必须更深层次揭示波动鳍推进机理,形成一套能够解释波动鳍结构参数和运动参数相互关系的定量准则,以方便机器鱼的设计与开发。
4.2水下感知系统研究
鱼类水下灵活运动的前提是自身拥有视觉、触觉、听觉和嗅觉等发达的感知系统,能够及时准确捕捉外界环境变化信息,从而有针对有效率的正确做出与周围流场相适应的运动策略,所以构建机器鱼灵敏的感知系统,增强机器鱼水下侦测能力,是完善机器鱼系统的重要环节。目前,各种信息的获取主要依靠底层传感器完成,应用于陆地场合的多种传感器技术日趋成熟,而对于专门应用于监测水下不同目标的传感器,在相关技术上还有待完善和突破,同时又要兼顾多传感器集成到机器鱼系统带来的信息融合与交互,对传感器信息进行系统研究是未来的发展趋势。所以优化感知系统是机器鱼实施自适应控制与运动的前提,必须在相关技术上做到协调跟进,以防迟滞机器鱼的发展。
4.3波动鳍控制算法研究
如果将机械结构比作机器鱼的躯干,控制算法则是机器鱼的神经中枢系统,当外界信息输送到机器鱼信息处理中心,至于控制中枢如何对接受的信息进行有效处理并且发出相应控制命令输送给各驱动器是控制算法的基本任务,仿生波动鳍的控制包括鳍条的驱动控制和多鳍条的协调控制,单根鳍条的控制是集中多鳍协调运行的基础,多鳍条的协同控制是波动鳍灵活运动的根本,所以对机器鱼控制算法的优化研究是升华机器鱼的重要手段之一。
4.4波动鳍多维化运动研究
波动鳍鱼类水下优越运动能力的根本在于其柔性鳍在应对不同环境时,能够迅速调整自身姿态,改变运动参数,抵抗横流冲击甚至能够吸收转化水流能量为己所用,一个重要的因素就是鳍条的柔性操作使得波动鳍能够实现多维运动,活动范围广,形态调整迅速而准确。目前,诞生的波动鳍都只能实现一维运动,波动空间小,运动形式固化,给予机器鱼的动力单薄,很多机器鱼的俯仰换向动作通过在身体周围安装多个人工波动鳍或增加重心调节装置来实现,造成结构复杂和控制困难双重压力。所以,优化运动传递机构的设计,实现波动鳍的多维运动,对于提高机器鱼的机动性能有着深远的研究意义和实际价值。
4.5水下能源供给研究
未来仿鱼推进器必然承担着高负载水下探测任务和长时间海洋巡游使命,必须能够保证充足的水下能源供给,目前应用于水下航行器主要包括技术成熟的传统铅酸电池、镉镍电池和锌银电池[38],但存在比能量低、污染严重等缺陷限制了其使用范围;比能量高的铝氧半燃料电池和氢氧燃料电池是很有前景的动力电池,但电池燃料技术和燃料存储技术也不成熟;动力锂电池可实现单节串并联管理,在能量密度和放电效应等方面也必须改进方可通用,所以开发高性能动力电池也是保证仿鱼推进器优越性能的一个重要前提,同时随着相关技术的发展,不妨将环境能如太阳能、海洋能和波浪能等转换供能也是改善水下机器人能源现状的捷径之一。
5 结论
波动鳍仿生机器鱼是水下机器人的重要研究方向之一,在未来海洋工程和海军装备等领域将发挥重要作用。虽然多种类型的波动鳍机器鱼样机百家争鸣,但与所期望的高效高速强机动的目标还存在很大差距,推进机理、感知系统、控制策略、机械结构和能源供给等都是制约未来发展的关键技术,在逐步突破各技术瓶颈的同时,再系统研究,机器鱼实用性能必将逐步完善。
参考文献:
[1]王 磊.两栖环境中仿生鳍的推进机理及实验研究[D].合肥: 中国科学技术大学, 2014.Wang Lei.Population mechanism and experimental research on robotic fin in amphibious environment[D].University of Science and Technology of China, 2014.
[2]胡天江.仿生长鳍波动适应性理论与控制方法研究[D].长沙: 国防科技大学, 2008.Hu Tianjiang.Undulation Adaptability Theory and Control for the Biomimetic Undulating Fins[D].Changsha: National University of Defense Technology, 2008.
[3]李 非.背鳍/背臀鳍波动推进机理与实验研究[D].长沙: 国防科技大学, 2005.Li Fei.Experimental and Numerical Researches on Undulatory Dorsal/Median Fin Propulsion Modes[D].Changsha: National University of Defense Technology, 2005.
[4]魏清平, 王 硕, 谭 民, 等.仿生机器鱼研究的进展与分析[J].系统科学与数学, 2012, 32(10): 1274-1286.Wei Qingping, Wang Shuo, Tan Min, et al.Research Development and Analysis of Biomimetic Robotic Fish[J].Journal of Systems Science and Mathematical Sciences, 2012, 32(10): 1274-1286.
[5]LIGHTHILL J, BLAKE R.Biofluiddynamics of balistiform and gymnotiform locomotion.Part 1.Biological background and analysis by elongated-body theory[J].Journal of Fluid Mechanics, 1990, 212: 183-207.
[6]DANIEL T L.Forward flapping flight from flexible fins[J].Canadian Journal of Zoology, 1988, 66(3): 630-638.
[7]RAHMAN M M, MIKI H, SUGIMORI S, et al.Development of a real time simulator based on the analysis of 6-degrees of freedom motion of a bio-mimetic robot with two undulating side fins[J].Journal of Aero Aqua- Biomechanisms, 2013, 3(1): 71-78.
[8]Shahin Sefati, Izaak Neveln, Malcolm A.MacIver, et al.Counter-propagating waves enhance maneuverability and stability: a bioinspired strategy for robotic ribbon-fin propulsion.The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma[C].Italy.June 24-27: 2012.
[9]Wang Shuo, Dong Xiang, Shang Liu-Ji.Thrust Analysis of the Undulating Ribbon-Fin for Biomimetic Underwater Robots[C].The 2nd International Conference on Intelligent Control and Information Processing, July 25-28, 2011: 335-340.
[10]Xie Haibin, Yin Dong.Dynamics and Initial Experiments of Bionic Undulating Fish Fin[C].China CAC, 2013.
[11]高 帅.仿生鳐鱼的结构设计与实验研究[D].哈尔滨: 哈尔滨工业大学, 2014.Gao Shuai.structure design and experimental research of biomimetic rays[D].Harbin: Harbin Institute of Technology, 2014.
[12]Tianjiang Hu, Lincheng Shen, Longxin Lin et al.Biological inspirations, kinematics modeling, mechanism design and experiments on an undulating robotic fin inspired by Gymnarchus niloticus[J].Mechanism and Machine Theory, 2009(44): 633-645.
[13]李 非.背鳍/背臀鳍波动推进机理与实验研究[D].长沙: 国防科技大学, 2005.Li Fei.ExPerimental and Numerieal Researches on Undulatory Dorsal/Median Fin Propulsion Modes[D].Changsha: National University of Defense Technology, 2005.
[14]Blevins, Erin Leigh.Undulatory Locomotion in Freshwater Stingray Potamotrygon Orbignyi: Kinematics, Pectoral Fin Morphology, and Ground Effects on Rajiform Swimming.Doctoral dissertation, Harvard University, 2012.
[15]Oscar M.Curet, Neelesh A.Patankar, George V.Lauder.Aquatic maneuvering with counter-propagating waves: a novel locomotive strategy[J].Journal of the Royal Society Interface, 2011(8): 1041-1050.
[16]Michael Sfakiotakis and John Fasoulas.Development and Experimental Validation of a Model for the Membrane Restoring Torques in Undulatory Fin Mechanisms[C].22nd Mediterranean Conference on Control and Automation (MED), University of Palermo, Palermo, Italy June 16-19, 2014.
[17]Izaak D.Neveln, Rahul Bale, Amneet Pal Singh Bhalla, et al.Undulating fins produce off-axis thrust and flow structures[J].The Journal of Experimental Biology, 2014(217): 201-213.
[18]Mohsen Siahmansouri, Ahmad Ghanbari, Mir Masoud Seyyed Fakhrabadi.Design, Implementation and Control of a Fish Robot with Undulating Fins[J].International Journal of Advanced Robotic Systems, 2011, 8(5): 61-69.
[19]刘芳芳.基于柔性鳍波动的水下仿生系统推进性能研究[D].杭州: 浙江大学, 2012.Liu Fangfang.Research on flexible Undulating Fins Based Biomimetic System Underwater and Its Propulsion[D].Hangzhou: Zhe Jiang University, 2012.
[20]Wang Guangming, Ma Xiandong, Hu Tianjiang, et al.Experiment and analytical study on factors influencing biomimetic undulating fin propulsion performance based on orthogonal experimental design[J].Advanced Robotics, 2013, 27(8): 597-609.
[21]Chunlin Zhou, Kin Huat Low.On-line Optimization of Biomimetic Undulatory Swimming by an Experiment-based Approach[J].Journal of Bionic Engineering, 2014, (11): 213-225.
[22]邓志刚, 朱大奇, 方建安.水下机器人动力学模型参数辨识方法综述[J].上海海事大学学报, 2014, 35(2): 74-80.Deng Zhigang, Zhu Daqi, Fang Jianan.Parameter identification survey of dynamic model for underwater vehicles[D].Journal of Shanghai Maritime University, 2014, 35(2): 74-80.
[23]Lamas M.I, Rodriguez J.D, Rodriguez C.G, et al.Three-dimensional CFD analysis to study the thrust and efficiency of a biologically-inspired marine propulsor[J].Polish Maritime Research, 2011(18): 10-16.
[24]Lamas, M.I., Rodríguez, C.G., Rodríguez, J.D..Optimization of the efficiency of a biomimetic marine propulsor using CFD[J].INGENIERÍA E INVESTIGACIÓN, 2014, 34(1): 17-21.
[25]Zhou H, Hu T J, Xie H B, et al.Computational and experimental study on dynamic behavior of underwater robots propelled by bionic undulating fins[J].Sci China Tech Sci, 2010, 53: 2966-2971.
[26]周 扬.基于CFD的鳐鱼水动力学数值模拟研究[D].哈尔滨: 哈尔滨工业大学, 2011.Zhou Yang.Reseach on Hydrodynamic Performance Simulation of Rays basic on CFD[D].Harbin: Harbin Institute of Technology, 2011.
[27]章永华, 何建慧.仿生鱼鳍波动推进模式对游动性能影响的数值研究[J].机械科学与技术, 2013, 32(3): 435-440.Zhang Yonghua, He Jianhui.Numerically Simulating Influence of Undulating Motion Mode of Biomimetic Fish Fin on Its Motion Performance[J].Mechanical Science and Technology for Aerospace Engineering, 2013, 32(3): 435-440.
[28]章永华, 何建慧.周期性扰动对鱼鳍波动推进性能影响数值研究[J].计算机仿真, 2012, 29(10): 209-214.Zhang Yong-hua, He Jian-hui.Research on Effects of Periodic Disturbance on Fin Undulatory Propulsion Performance[J].Computer Simulation, 2012, 29(10): 209-214.
[29]Zhang Yong-Hua, He Jian-Hui, Low Kin-Huat.Numeric Simulation on the Performance of an Undulating Fin in the Wake of a Periodic Oscillating Plate[J].International Journal of Advanced Robotic Systems, 2013, 10(352): 1-12.
[30]WEI Qing-ping, WANG Shuo, DONG Xiang, et al.Design and Kinetic Analysis of a Biomimetic Underwater Vehicle with Two Undulating Long-fins[J].ACTA AUTOMATICA SINICA, 2013, 39(8): 1330-1338.
[31]Wang Yangwei, Tan Jinbo, Zhao Dongbiao.Design and Experiment on a Biomimetic Robotic Fish Inspired by Freshwater Stingray.Journal of Bionic Engineering, 12(2015): 204-216.
[32]Oscar M Curet, Neelesh A Patankar, George V Lauder, et al.Mechanical properties of a bio-inspired robotic knifefish with an undulatory propulsor.Bioinsp[J].Biomim, 2011(6): 1-9.
[33]Masaaki Ikeda, Shigeki Hikasa, Keigo Watanabe, et al.A pectoral fin analysis for diving rajiform-type fish robots by fluid dynamics[J].Artif Life Robotics, 2014(19): 136-141.
[34]M.I.LAMAS, J.D.RODRÍGUEZ, C.G.RODRÍGUEZ.CFD Analysis of Biologically-Inspired Marine Propulsors[J].BRODO GRANDJA, 2012(63): 125-133.
[35]Michael Sfakiotakis, Manolis Arapis, Nektarios Spyridakis, et al.Development and Experimental Evaluation of an Undulatory Fin Prototype[C].Proceedings of the RAAD, 22nd International Workshop on Robotics in Alpe-Adria-Danube Region September 11-13, 2013.
[36]Haijun XU, Lei ZHANG, Cunyun PAN, et al.An investigation of Undulating Shape Adaptation Characteristics of a Hydraulic-Driven Bionic Undulating Robot[J].Applied Mechanics and Materials, 2015, 743: 150-156.
[37]蒋小勤, 杜德锋, 李晓前, 等.仿生扭波推进模型航行试验研究[J].海军工程大学学报, 2013, 25(2): 1-4, 13.Qiang Xiaoqin, Du Defeng, Li Xiaoqian, et al.Test of bionic robot—fish swimming by torsional wave propulsion[J].Journal of naval university of engineering, 2013, 25(13):1-4, 13.
[38]龚 锋, 王 力.UUV用动力锂电池综述[J].船电技术, 2013, 33(8): 16-20.Gong Feng, Wang Li.Reviews of High Power Lithium Batteries Powered UUV[J].Marine Electric & Electronic Technology, 2013, 33(8): 16-20.
Research Development and Analysis of Biomimetic Robot Fish Propelled by Undulating Fins
XU Feiran, WANG guangming, TAN Xiaopeng
(Mechatronic Engineering and Automation, National University of Defense Technology, Changsha 410073, China)
Abstract:One of the most popular propulsion motion of MPF fishes is propelled by undulating fins, which made the fish have the characteristic of high efficiency, high stabilit y and strong maneuverability.In recent years, because of the strong efforts to develop marine resources and the urgent need to improve military equipment, the biomimetic robot fish have got more and more attractions.In the first, making a brief instruction and classification to the fish which propelled by undulating fins, then summarize the bio-mimetic undulating robot fish in the two respects of propulsive mechanism study and bio-mimetic fish robots development, at last make some discuss and analysis to the key technologies.
Keywords:undulating fin; biomimetic robot fish; underwater robot
DOI:10.3969/j.issn.2095-6649.2015.04.01
作者简介:徐飞然(1990-), 男, 安徽安庆人, 硕士研究生, 主要研究方向: 仿生机器人;王光明(1974-), 男, 河南焦作人, 副教授,硕士研究生导师, 主要研究方向: 仿生机器人、测试技术等。
*基金项目:国家自然科学基金资助项目:多鳍协调波动推进机理与实验研究(61273347)。
Citation: XU Feiran, WANG Guangming, TAN Xiaopeng.Research Development and Analysis of Biomimetic Robot Fish Propelled by Undulating Fins [J].The Journal of New Industrialization, 2015, 5(4): 3‒10.
