近岛礁浅水环境下浮式平台系泊系统设计研究
2015-04-25程小明中国船舶科学研究中心江苏锡214082
丁 军,程小明,田 超,张 凯,吴 波(中国船舶科学研究中心,江苏 无 锡214082)
近岛礁浅水环境下浮式平台系泊系统设计研究
丁 军,程小明,田 超,张 凯,吴 波
(中国船舶科学研究中心,江苏 无 锡214082)
基于有限水深格林函数、Morison公式和时域耦合动力分析方法,以一近岛礁半潜式生产生活平台为研究对象,分析了传统系泊方式(悬链线式和张紧式)和桩柱式系泊方式下平台的运动和系泊系统动力响应。结果表明,通常应用在中深水海域的传统系泊方式,在近岛礁浅水环境下使用时会出现一系列的问题,且进一步优化的空间较小。而文中提出的新型桩柱式系泊系统,很好地解决了传统系泊方式在浅水中存在的问题,且使得船舶的停靠变得更加便利。该文中的分析结果可为平台的水池模型试验和浅水环境下浮式平台系泊系统的进一步设计提供参考。
浮式平台;近岛礁;浅水;系泊系统;桩柱式系泊
0 引 言
在我国海洋岛礁周边往往都环绕着宽度数百到数千米、水深很浅的珊瑚礁盘(图1),这些礁盘不仅具有丰富的渔业和旅游资源,而且发挥着消波、护岛的重要作用。为开发海洋资源,可以在岛礁附近布设各种浮体结构物作为海洋开发、渔业生产、环境旅游等综合保障基地,这种近岛礁浮式平台具有如下几个显著优点:1)避免大量土方机械的长距离输运及后勤保障,成本低;2)对生态环境、礁盘和海岛陆地形态几乎没有影响;3)现场施工周期短,可实现快速布放;4)可利用我国造船大国的优势,浮式平台的设计、建造和运营都不存在难点;5)可实现模块化组装,布置和使用灵活等。
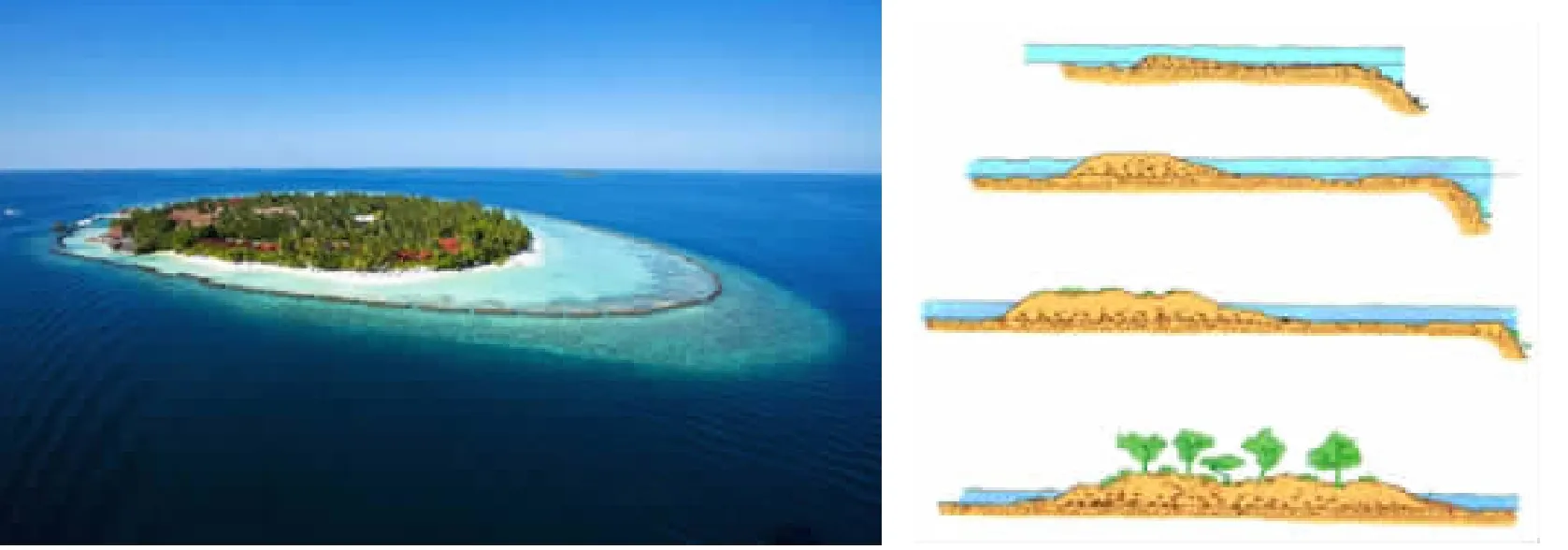
图1 典型岛礁及其海底地形Fig.1 Typical islands and side elevation of reef flat
对于岛礁附近的浮式平台,需要通过系泊系统长期系泊于作业地点,而不能像船舶一样,在遇到恶劣海况时可以避航,且浮式平台在生产作业时要求平台具有低幅运动特性,在生存工况下要求平台安全可靠,因此在设计浮式结构物时,正确确定其系泊系统,保证平台在作业工况和生存工况下运动响应及系泊缆张力等参数在合理的范围内十分重要。
目前对于浮式平台及其系泊系统的水动力特性,国内外学者作了大量的研究。Kim等[1,2]研究了平台系泊系统耦合的时域分析方法,分析平台运动响应及其系泊系统的动力特性;Arcandra等[3]提出应用非线性杆元法对聚酯纤维材料系泊缆进行分析,考虑系泊缆的大变形和非线性应力—应变特性,并举例对平台系统进行时域耦合动态分析。王磊等[4]对一艘动力定位船舶二阶低频慢漂力进行了模型试验,对系泊系统中最为关心的二阶低频慢漂力进行了研究;史琪琪、袁梦、周素莲、童波等[5-8]通过时域分析方法对深水半潜式平台系泊系统水动力性能进行了探索,得出了一些有益的结论;肖龙飞等[9]通过数值模拟和模型试验的方法研究了160kDWT FPSO在极浅水中运动的安全性。本文将基于三维势流理论和时域耦合动力分析方法,以一近岛礁半潜式生产生活平台为研究对象,分析不同系泊系统下,该平台在环境力作用下的运动和系泊缆张力响应,为平台在浅水环境下系泊系统的设计及水池模型试验提供参考。
1 基本理论
1.1 Morison公式
对于浮式平台中的撑杆结构,当D/λ<0.2时称为小直径管柱结构,目前通常采用Morison公式来计算,其单位长度上杆件所受波浪力可表示为:

式中:D为杆件的特征直径,uf为垂直杆件方向的流体质点速度,us为垂直杆件方向结构自身的运动速度,A为杆件截面面积,ρ为流体的密度,Cm为惯性力系数,Cd为阻力系数。
1.2 有限水深格林函数
岛礁附近的水深一般较浅,位于浅水中的浮体所受水动力和载荷响应与深水中的存在较大差别,因此需要应用有限水深格林函数法求解浮体在波浪中的受力和响应。
对于浮式平台的本体结构,按照线性势流理论,结构物周围的总速度势可表示为:

对于无航速的浮式结构物,速度U=0,则上式可表示为Φ(x,y,z,t)=Φt(x,y,z,t),Φt(x,y,z,t)由入射势φI、绕射势φD和辐射势φR组成。
根据线性波浪理论,入射势可表示成:

绕射势φD和辐射势φR应满足以下几个边界条件即定解条件:1)拉普拉斯方程;2)自由表面条件;3)底部条件,由于为有限水深,应满足物面条件,辐射势为(式中:nj和φj分别为单位复速度的j模式运动辐射势),绕射势为远方辐射条件。
设p(x,y,z)为流场内任一点,q(ξ,η,ζ)为点源所在位置。则满足拉普拉斯方程以及物面条件之外的所有边界条件的三维有限水深格林函数的积分形式为:

流域内各点速度势可表示为物面S上的点源分布形式:

物体所受波浪力则由波浪压力在物面上的积分求得:

其中:波浪压力P可由已知的速度势及线性化的Bernoulli方程得出:

2 计算模型
2.1 浮式平台主要参数
以一岛礁生产生活平台为研究对象,该浮式平台主要由上部平台、中间立柱、下部浮筒和横撑组成,其主要参数如表1,平台示意图见图2。
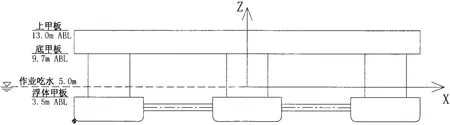
图2 浮式平台Fig.2 Floating platform
2.2 环境参数
该平台的功能定位是岛礁建设保障平台,集物资储存、能源补给、人员居住等功能于一体,平台将主要布置在水深为10 m左右的礁盘内侧或泻湖内,根据已有的调研资料,选定平台自存工况下的环境条件如表2所示(由于布置在泻湖内或礁盘内侧,海流的流速较小,计算时暂不考虑)。
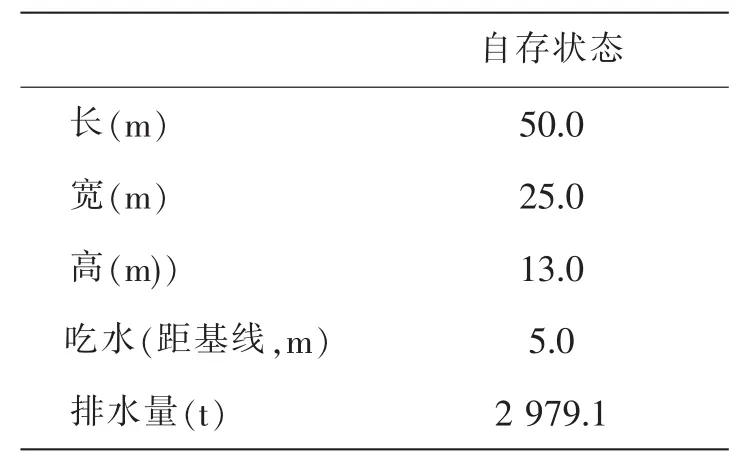
表1 平台主尺度Tab.1 Main dimensions of platform
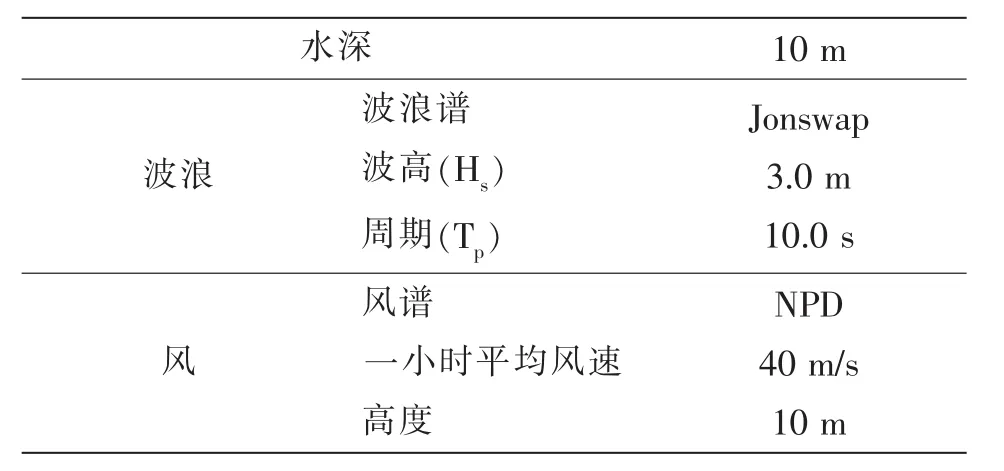
表2 环境条件Tab.2 Environmental condition
2.3 计算方法及校核参数
平台及锚泊系统的耦合运动分析在时域中进行,平台所受的环境载荷包括一阶和二阶波浪力以及风力,其中风力包含有平均风力和脉动风力两部分。
由于平台近岛礁布置,可以证明[10],当波浪由远方深水区传播至岛礁附近浅水区时,波浪的方向将逐渐垂直于岸线。同时,一般对于浮式平台而言,当风浪流在同一直线上时将在锚泊线上产生最大的张力。因此本文计算中将主要考虑90°和60°两个方向(90°方向即波浪和风沿着平台宽度方向传播,见图2)。
由于平台的功能定位为岛礁生产生活保障平台,因此文中的校核参数主要从平台的功能性和安全性考虑,主要包括:触底(P1~P4分别代表浮筒基线处四个角点)、气隙(P5~P8分别代表湿甲板四个角点)、运动响应(包括横荡、纵荡和横摇)和锚泊系统(包括系泊缆张力、防撞垫压力和系泊桩受力等)。
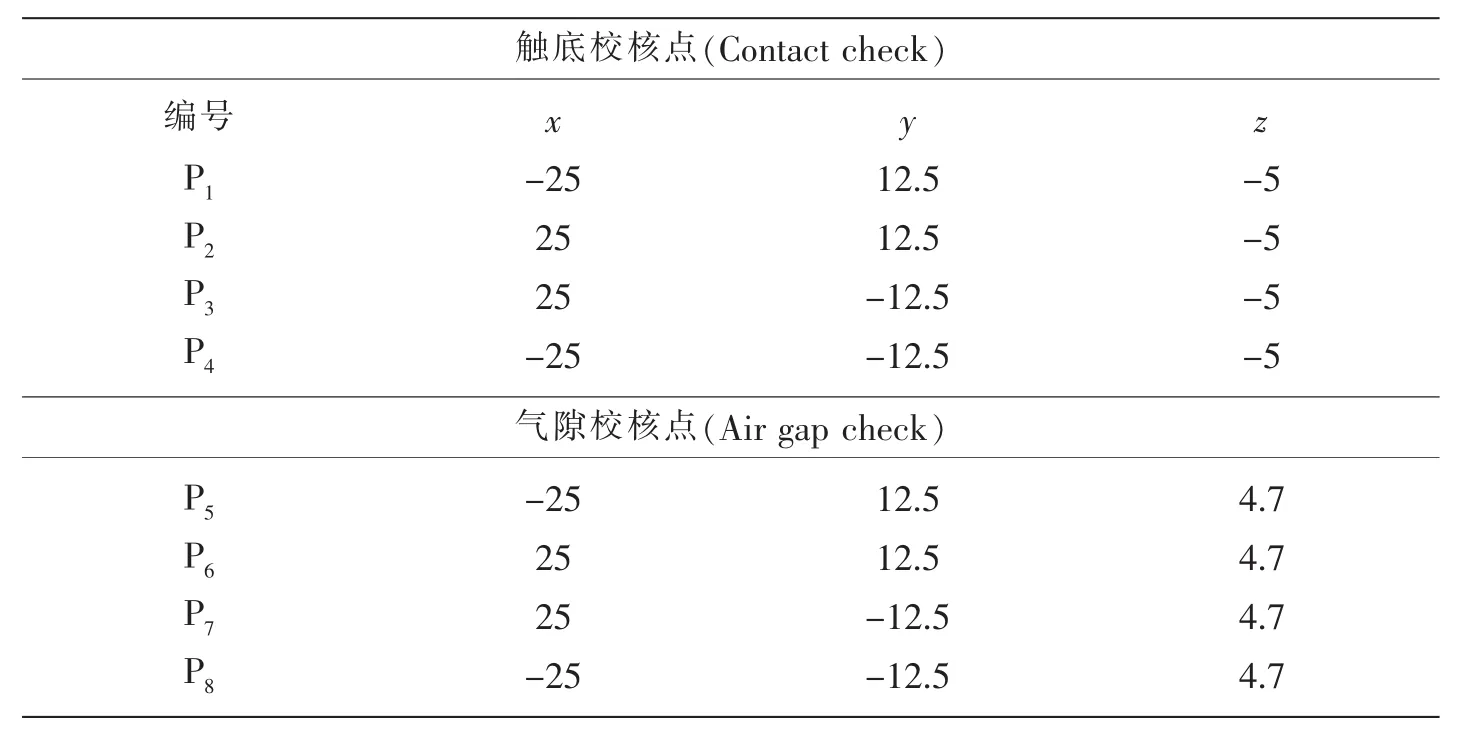
表3 触底和气隙校核点位置Tab.3 Points position of contact and air gap check
3 悬链线式系泊和张紧式系泊
对于半潜式海洋平台,悬链线式系泊和张紧式系泊是最常见的系泊方式。但这两种系泊方式通常应用在中、深水海域,在如此浅的水深中还未见有应用的实例,本研究中首先考虑这两种传统的系泊方式,分别分析了浮式平台悬链线式系泊和张紧式系泊的运动响应和动力响应,校核这两种系泊方式在近岛礁浅水环境下的适用性。图3和图4给出了这两种系泊方式的示意图,表4给出了这两种系泊方式的主要参数。
图5和图6分别给出了90°方向环境力作用下,悬链线式系泊方案和张紧式系泊方案平台及系泊系统的时域耦合动力分析结果。从图中可以看出,两种系泊方案下,平台均出现了触底和负气隙现象。在初步计算结果的基础上对这两种系泊方案作了进一步的优化,主要从系泊缆长度、预张力、系泊缆的数目和张力倾角等方面进行优化,但都未能很好地解决平台触底问题,同时锚的上拔力也难以消除。计算结果表明在超浅水环境中,悬链线式系泊和张紧式系泊方案难以满足有关触底和气隙的设计要求,且进一步优化的空间很小。

表4 系泊缆主要参数Tab.4 Main parameters of mooring lines
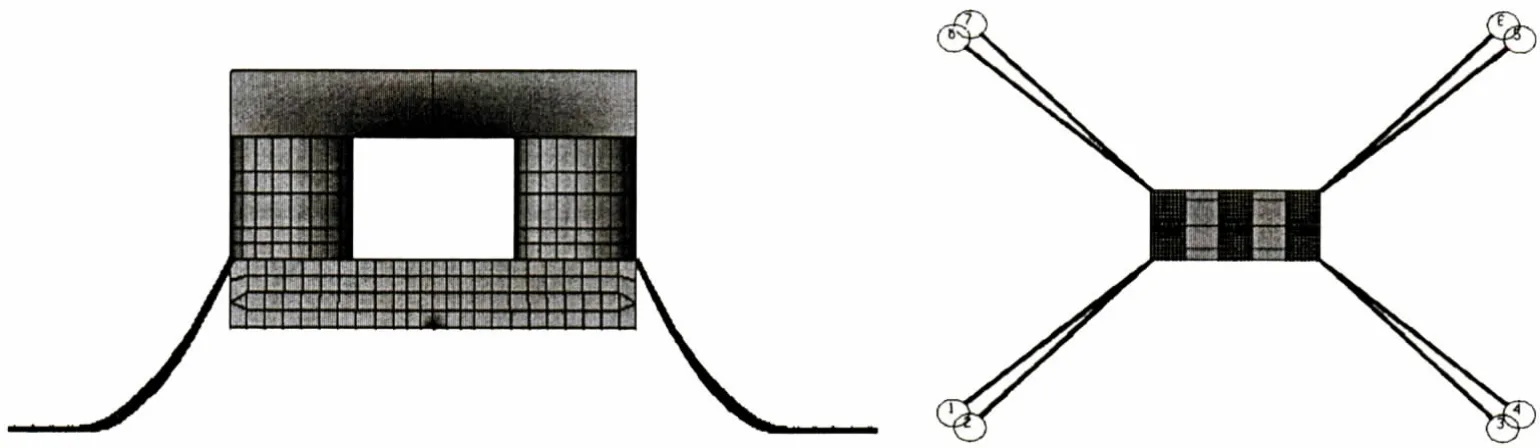
图3 悬链线式系泊Fig.3 Catenary mooring
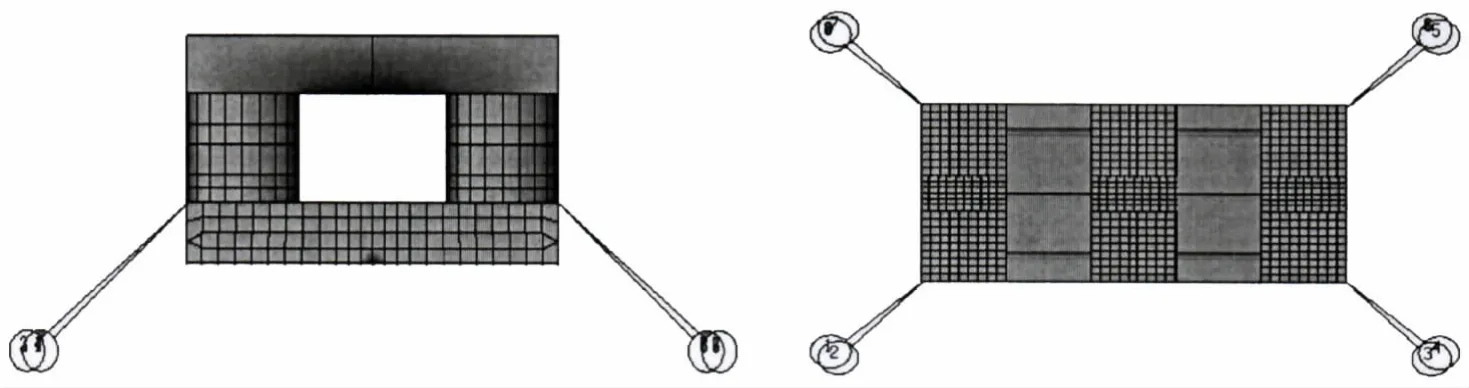
图4 张紧式系泊Fig.4 Taut mooring
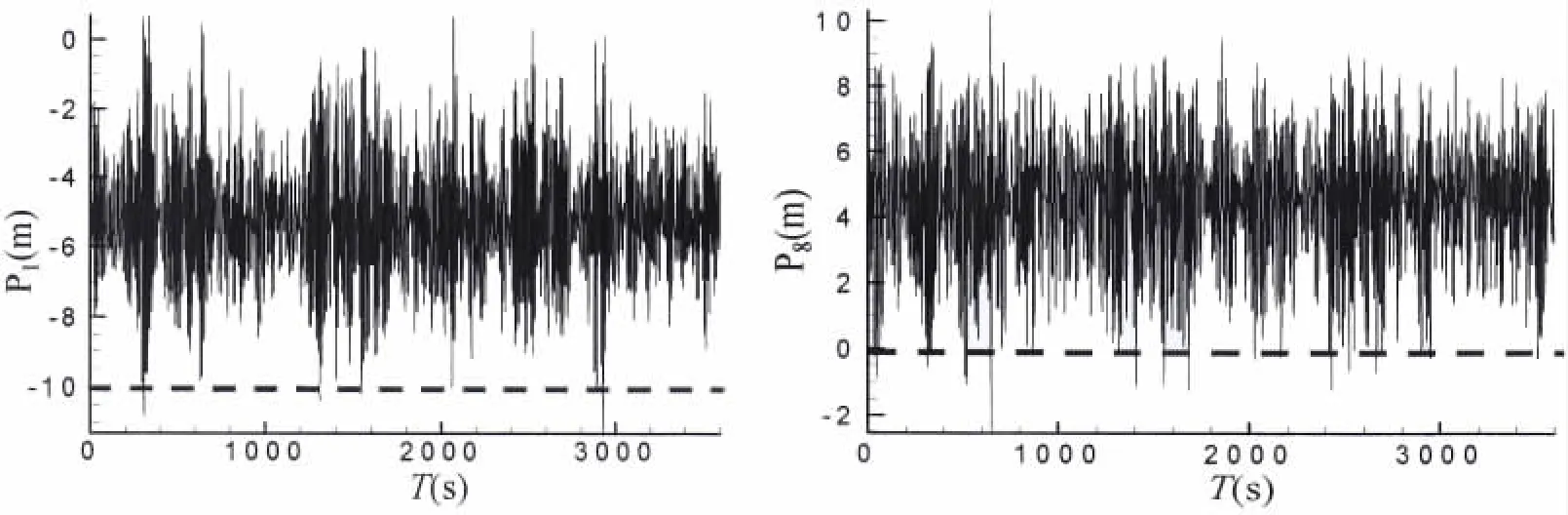
图5 触底和气隙分析(悬链线式系泊):(a)触底分析;(b)气隙分析Fig.5 Contact and air gap analysis(catenary mooring):(a)Contact check;(b)Air gap check

图6 触底和气隙分析(张紧式系泊):(a)触底分析;(b)气隙分析Fig.6 Contact and air gap analysis(taut mooring):(a)Contact check;(b)Air gap check
4 桩柱式系泊
除了悬链线式和张紧式系泊方案存在的上述问题,这两种系泊方式还易受海床地形的影响和制约,同时会对船的靠泊形成干扰,需要辅助的靠泊装置,综合以上考虑,文中提出一种新型的桩柱式系泊方案,即在平台的背浪侧放置两根桩柱(计算模型中采用两根桩柱,实际工程中可采用多根),平台通过缆绳系泊在这两根桩柱上,同时桩柱和平台间布置防碰垫。该系泊系统的示意图见图7,系泊系统具体参数见表5,具体细节如下述。

图7 桩柱式系泊Fig.7 Pile-post mooring system
桩柱、防碰垫:在距平台首尾各5 m处分别布置一直径2 m高20 m的钢筋混凝土桩柱,在与平台接触位置(水线、上平台中心即距平台基线11.35 m)处安装直径为4.5 m的防碰垫用于阻止平台向桩柱一侧移动;缆绳:在平台首尾各5 m,距平台基线9.7 m处分别布置四根160 mm直径的聚酯纤维缆成扇形(成60°夹角)与桩柱相连,每根缆的长度15~20 m。这八根缆的作用是为了防止平台作横向及纵向的大幅运动,从而起到定位作用。

表5 系泊缆主要参数Tab.5 Main parameters of mooring lines
同上述系泊方案分析类似,首先校核了桩柱式系泊系统平台的触底和气隙,然后进一步对浮式平台的运动响应、系泊系统等参数进行校核,具体结果见图8~11、表6和表7。
从图8和表6中可以看出,在90°和60°环境力作用下,平台均未发生触底和负气隙现象,在60°环境力时,平台底部离海底最小还有0.8 m的空间,而气隙最小也有0.3 m,说明桩柱式系泊系统很好地解决了传统系泊方式不能控制的触底和负气隙现象。而平台横荡和纵荡的最大值都为1.5 m,平台的横摇最大值为13.6°。从数值上看,桩柱式系泊在限制二阶力引起的慢漂运动的同时也约束了平台的波频响应,所以将平台的整体运动响应控制在一个较小的范围内。
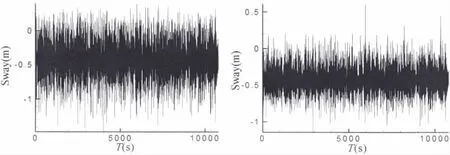
图8 横荡运动响应时历曲线:(a)90°环境力;(b)60°环境力Fig.8 Time series of sway:(a)Direction of 90 degrees;(b)Direction of 60 degrees
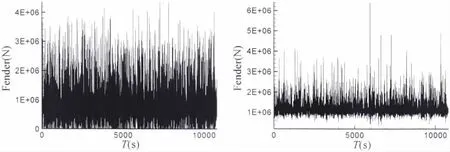
图9 防碰垫受力时历曲线:(a)90°环境力;(b)60°环境力Fig.9 Time series of the loads acting on fender:(a)Direction of 90 degrees;(b)Direction of 60 degrees

图10 系泊缆受力时历曲线:(a)90°环境力;(b)60°环境力Fig.10 Time series of the loads acting on mooring line:(a)Direction of 90 degrees;(b)Direction of 60 degrees
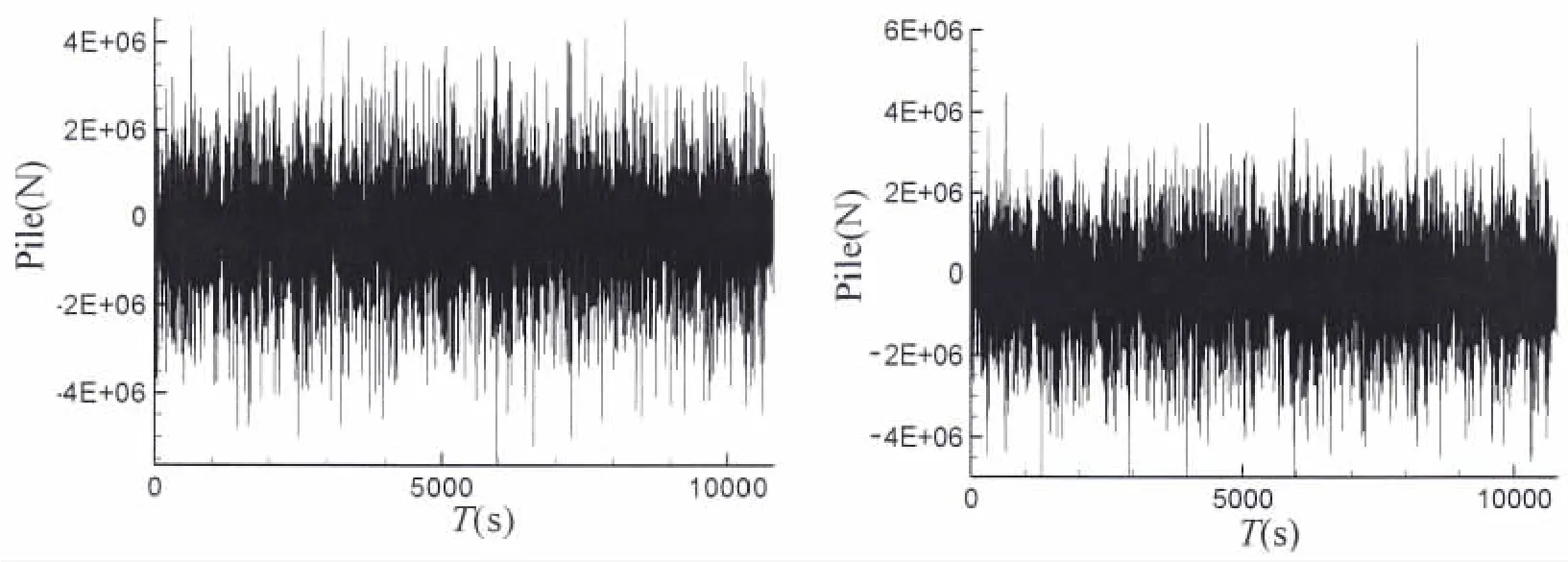
图11 桩柱受力时历曲线:(a)90°环境力;(b)60°环境力Fig.11 Time series of the loads acting on pile:(a)Direction of 90 degrees;(b)Direction of 60 degrees

表6 平台最大运动响应统计结果Tab.6 Statistic results of maximal motion responses for platform

表7 平台系泊系统各部分最大受力统计结果Tab.7 Statistic results of maximal loads acting for mooring system
从图9~11和表7中可以看出,平台在60°环境力作用时的受力(包含一阶力、二阶力和风载荷)要略大于90°时,约为590 t。这主要是因为浮筒在x方向的投影面积较大而引起较大的波浪力。另外由于60°环境力作用时平台艏艉的运动不再像90°环境力作用时具有对称性,导致平台艏艉系泊系统及防碰垫的受力不再均匀,最大受力明显增大,如防碰垫所受最大压力甚至增大了31.3%。因此60°环境力作用时是该平台和系泊系统的危险工况。同时可以发现,60°环境力作用时,系泊缆上最大张力为240 t,安全系数为1.88,满足相关规范要求。
5 结 论
近岛礁浮式平台作为海洋岛礁开发、渔业生产、环境旅游等综合保障基地时拥有多方面的优势,但岛礁附近的地形复杂多变,水深较浅,这些给浮式平台系泊系统的设计带来了很大的困难。文中基于Morison公式、有限水深三维格林函数和时域耦合动力分析方法,以一近岛礁半潜式生产生活平台为研究对象,分析了传统系泊方式和桩柱式系泊方式下,平台的运动和系泊系统动力响应,得到如下两点主要结论:
(1)传统的系泊方式,如悬链线式和张紧式系泊方式,通常应用在中、深水海域,当将它们扩展到近岛礁浅水环境下时出现了一系列的问题,如平台运动响应过大,从而发生触底和负气隙现象;平台与锚泊系统发生共振;锚的上拔力难以消除等。当采用改变系泊缆长度、预张力、系泊缆的数目和张力倾角等优化手段时,效果并不明显,优化的空间很小;
(2)针对传统系泊方式存在的问题,并结合平台停靠船的便利性,本文提出了新型的桩柱式系泊系统。该系泊系统由于不存在拖曳的系泊缆,因而不会对停靠船产生干扰,同时,从时域耦合动力分析结果来看,平台在该系泊系统下,整体运动响应较小,不会发生触底和负气隙现象,且系泊系统各部分受力均满足相关要求,较好地解决了近岛礁浅水环境下浮式平台的系泊问题,可为平台的水池模型试验和浅水环境下浮式平台系泊系统的设计提供参考。
[1]Kim M H,Tahar A,Kim Y B.Variability of spar motion analysis against various design methodologies/parameters[C].Proceedings of the Twentieth Offshore Mechanics and Artic Engineering Conference,OMAE,2001.
[2]Kim M H,Koo B J,Mercier R M.Vessel/mooring/riser coupled dynamic analysis of a turret-moored FPSO compared with OTRC experiment[J].Ocean Engineering,2005,32:1780-1802.
[3]Arcandra,Tahar,Kim M H.Coupled-dynamic analysis of floating structures with polyester mooring lines[J].Ocean Engineering,2008,38(35):1676-1685.
[4]王 磊,王先福,杨建民.动力定位船舶二阶低频慢漂力模型试验研究[J].海洋工程,2006,24(3):1-5. Wang Lei,Wang Xianfu,Yang Jianmin.Experimental research on second-order wave drift forces on a dynamically positioned ship[J].Ocean Engineering,2006,24(3):1-5.
[5]史琪琪,杨建民.半潜式平台运动及系泊系统特性研究[J].海洋工程,2010,28(4):1-8. Shi Qiqi,Yang Jianmin.Research on hydrodynamic characteristics of a semi-submersible platform and its mooring system[J].Ocean Engineering,2010,28(4):1-8.
[6]袁 梦,范 菊,缪国平,朱仁传.系泊系统动力分析[J].水动力学研究与进展,2010,25(3):285-291. Yuan Meng,Fan Ju,Miao Guoping,Zhu Renchuan.Dynamic analysis of a mooring system[J].Chinese Journal of Hydrodynamics,2010,25(3):285-291.
[7]周素莲,聂 武,白 勇.深水半潜式平台系泊系统设计研究[J].船舶力学,2010,14(5):495-502. Zhou Sulian,Nie Wu,Bai Yong.Investigation on mooring system design of a deepwater semi-submersible platform[J]. Journal of Ship Mechanics,2010,14(5):495-502.
[8]童 波,杨建民,李 欣.深水半潜平台悬链线式系泊系统藕合动力分析[J].中国海洋平台,2008,23(6):1-7. Tong Bo,Yang Jianmin,Li Xin.Coupled dynamic analysis of catenary mooring system for the deepwater semi-submerged platform[J].China Offshore Platform,2008,23(6):1-7.
[9]肖龙飞,杨建民,范 模,彭 涛.160kDWT FPSO在极浅水中运动安全性研究[J].船舶力学,2006,10(1):7-14. Xiao Longfei,Yang Jianmin,Fan Mo,Peng Tao.Research on motions and safety performance of a 160kDWT FPSO in ultra-shallow water[J].Journal of Ship Mechanics,2006,10(1):7-14.
[10]吴宋仁.海岸动力学[M].北京:人民交通出版社,200. Wu Songren.Coastal Hydrodynamics[M].Beijing:China Communications Press,2004.
Investigations on mooring system design for a floating platform in shallow water near islands and reefs
DING Jun,CHENG Xiao-ming,TIAN Chao,ZHANG Kai,WU Bo
(China Ship Scientific Research Center,Wuxi 214082,China)
Based on the finite water depth Green function,Morison equation and coupled dynamic analysis method,dynamic response analysis was performed for a semi-submersible platform in very shallow water with different types of mooring systems.The results show that traditional catenary or taut mooring systems,usually adopted for medium or deep water depth,will encounter a range of problems in very shallow water near islands and reefs,and the room for further optimization is very limited.But,the pile-post mooring system proposed in this paper can overcome these problems,and at the same time,makes ship docking much more convenient.The analysis results in this paper have certain guiding significance for model tests and further design of mooring systems in very shallow water.
floating platform;near islands and reefs;shallow water;mooring system;pile-post mooring
U661.4
A
10.3969/j.issn.1007-7294.2015.07.004
1007-7294(2015)07-0782-09
2015-02-28
国家重点基础研究发展计划资助(2013CB036102);工信部高技术船舶科研项目资助工信部联装[2012]533
丁 军 (1986-),男,工程师,E-mail:dingjun@cssrc.com.cn;
程小明(1957-),男,研究员,国家千人计划专家。
