基于EtherCAT的双机器人协作系统设计
2015-04-25沈玉玲蒋劲峰
吕 燕,沈玉玲,蒋劲峰
LV Yan, SHEN Yu-ling, JIANG Jin-feng
(上海电气集团中央研究院,上海 200071)
0 引言
随着大数据、互联网技术发展以及工业需求的不断提高,多种机器人协作系统越来越广泛的应用于制造加工中[1]。随之带来的是多种类型的智能化设备的加入以及复杂加工带来的智能化性能的需求提高等技术问题。而多机器人协作的实时性通讯问题是所有技术问题解决的关键。实时EtherCAT作为主流的工业以太网技术,被许多学者应用于机器人协作控制领域[2~4]。在多机器人协作系统中,采用全双工的EtherCAT协议能够有效的消除数据冲突,保证加工过程的持续稳定运行。本文对六关节机器人及搬运多机器人协作系统的整体系统架构设计,并将EtherCAT通讯协议应用到多关节运动控制系统设计中,对多机器人协作整体设计中通讯技术的进一步研究奠定了基础。
本文四部分组成:第一部分,多机器人协作系统整体架构介绍;第二部分IEC61800协议进行简单的介绍;第三部分,系统中EtherCAT主从站硬件和软件系统架构做简单的介绍;最后在实际的系统上进行仿真验证。

图1 双机器人整体架构
1 双机器人整体架构
多机器人协作制造单元主要是由两台机器人组成,包括一台国产六关节机器人以及一台四轴码垛机器人,协调实现在工业过程中多种物品的分拣、搬运及码垛功能。其中,六关节机器人末端手臂带有图像识别设备对分类的物品进行检测,而搬运机器人针对检测后的物品种类分批次进行码垛。
整个控制系统包括中央调度平台、码垛机器人及六关节机器人主机(即运动控制板卡)、伺服系统(含驱动卡及电机)、视觉、RFID等传感设备,如图1所示。其中,中央调度平台负责两台机器人工作的协调联控,以保证动作的一致性与连贯性。两台机器人主机分配具体的机器人任务安排,包括路径的规划、速度的控制以及传感信息的处理等任务。
系统采用开放式的软、硬件系统架构,主要有两部分组成:软件组件和硬件组件,如图2所示。其中软件组件包括以太网接口、传感器、控制器、示教等模块的支撑软件;硬件组件包括电源、网络管理、EtherCAT总线以及协议转换模块。单个机器硬件控制器与驱动器之间主要采用EtherCAT的总线通讯方式进行通讯,如图3所示。控制器与驱动器之间采用主从式环型通讯方式进行数据交互。

图2 机器人系统软硬件架构

图3 采用EtherCAT的机器人内部控制结构
2 EtherCAT协议IEC61800
2.1 EtherCAT协议
在工业标准IEC61800中对EtherCAT通讯技术进行了明确的定义[5]。EtherCAT采用标准的IEEE802.3以太网架构,并0X88A4的帧类型作为载体;EherCAT技术本身是基于EtherNET研发出来的,因此主站的实现可以不采用其他的硬件设备;然而在实际的工业控制中为了提高系统的通讯协议也有采用硬主站的通讯方式。图4为标准的EtherCAT总线通讯协议,包括EtherCAT协议的数据标准化结构,该架构是由原始IEEE802.3作为EtherCAT的MAC报头专用字段,该字段由三部分组成用来定义EtherCAT传输长度的2bit地址、包含EtherCAT指令信息的4字节类型段。
图4 是E t h e r C A T 帧处理结构框图,可以看出EtherCAT采用从站控制器进行端口自匹配帧处理机制,而不保存到从站控制器中;数据以字节的形式被从站控制器进行读写。转发延时是由接收到的FIFO数据的大小和EtherCAT处理单元的延时来确定的。忽略发送FIFO来减少延时。当帧通过节点时,EtherCAT从站设备读取数据地址;同样,报文经过时,进行输入数据的插入;该帧仅仅被延迟几个纳秒的时间。由于以太网帧包含许多设备的双向收发数据,可用数据率提高到90%以上。

图4 EtherCAT协议栈
2.2 IEC-61800标准
IEC 61800系列目标是提供一个可调速的电力驱动系统通用规范。其中,IEC 61800-7描绘了控制系统和电源驱动系统之间的通用接口。IEC 61800-7提供一个驱动函数及数据读取的方法,独立于数据驱动文件及数据接口。目标是一个具有通用功能和对象的驱动模型,可以在不同的通讯接口上面进行映射。在未知驱动设备具体先验知识的情况下,使通用的运动控制在控制器中的实现成为可能。
该标准包括IEC 61800-7-1(接口定义)、IEC61800-7-200(标准规范定义) 、IEC 61800-7-300(网络技术规范)EC61800-7定义通用的PSD(电源驱动系统)接口标准规范定义,包括许多标准类型如CIA 402,CIP Motion、FROFIdriver、SERCOS。在IEC61800-7-200下的IEC 61800-7-201规范了电气驱动系统中的独立总线CIA 402驱动标准。它既包含实施控制对象定义,也包括配置、调整、识别、网络管理对象的定义。IEC 61800-7-300下的IEC61800-7-301标准,定义了CIA402驱动规范在EtherCAT网络的映像。特别是PDO(过程数据对象)通讯及映像参数的定义。
3 基于主从站的EtherCAT的机器人控制系统
3.1 硬件系统
在多机器人控制系统中,大量的传感器数据及控制指令在机器人主站从站之间传递,EtherCAT网络以100Mbps速度进行实时通讯,可以实现力矩、速度和位置的有效控制。主站控制器包括PC平台以及运动控制PCI卡。在运动控制中,为了保证系统的实时性,对于硬实时要求比较高的场合如运动控制及安全应用,运动控制卡中用装有RTX实时扩展的Linux-2.6.30-RTAI系统,本系统中的主站采用赫友讯的EtherCAT硬主站板卡CIF-50。
EtherCAT主站控制模块包括PCI运动控制卡、可视化视频采集以及PC主控制平台。PCI运动控制卡负责机器人各轴的运动控制同时管理着数据双向传输网络。基于PC平台安装的RTX系统,用来管理和构建协调多机器人实时性操作,例如在线路径优化、负载动态补偿、任务分配、智能调度等。同时,可视化的视频采集及处理系统以及图形化用户界面等也在主站中完成,帮助机器人完成视觉伺服以及其他相关工作。综上所述,机器人的控制主站可以实现包括机器人协作、数据采集及界面引擎以及进行整个机器人控制的功能,如图3所示。
E t h e r C A T 从站包括两个部分。第一部分是EtherCAT控制板卡用来管理EtherCAT网络的交互数据,接口采用RJ45,用于数据收发。EtherCAT通过选择相关地址读取来选取并确定下一个连接的EtherCAT从站,而整个过程无延迟。第二部分是机器人协作的数据交互,机器人内部需要交互的数据包括力矩、编码器传感数据、运动控制指令等。从站包含8通道的ADC模块、SCI串行接口传输模块(传输F/T传感器和绝对编码器数据)、24位PWM接口和D/A转换模块(用于控制伺服电机运动),主控制芯片采用的TI的DSP28335实现对整体系统以及电机的控制。
3.2 软件系统
本文主要针对EtherCAT主站和从站进行软件设计。
EtherCAT主站软件流程如图5所示,流程主要反映发送控制数据。所有从站准备就绪后,主站周期性的向从站派发控制指令,打包成EtherCAT帧格式发送给从站,完成伺服控制。
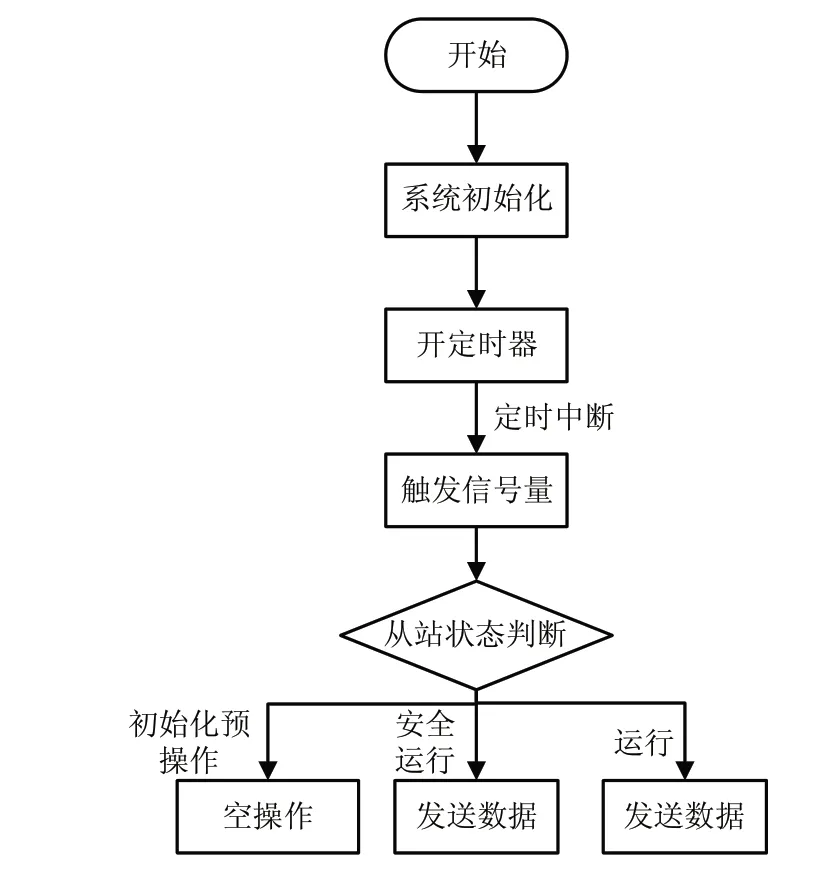
图5 主站软件流程图
EtherCAT从站软件流程如图6所示,流程主要反映接收控制数据与执行。从站周期性的检测主站的控制指令,接收成功后对数据进行解包处理并执行主站的控制指令。

图6 从站软件流程图
4 系统验证
多机器人协调联控测试系统是在通过X86架构的运动控制卡、PCI的主站控制卡以及10个带EtherCAT接口的驱动器来实现的,系统采用带RTX的linux系统,与上面章节的通讯方式一样还有其他的转换模块如RS485、232 、DAC等。图7表明系统的硬件结构,其中图7(a)是EtherCAT应主站板卡;图7(b)为linux系统的工业主板以及运动控制卡;图7(c)为多机器协作的驱动系统。
对于本系统两机器人的同步性能,根据文献[6]的方法对埃夫特机器人的第四轴,与沃迪机器人的第四轴的同步性能进行测试,测试结果如图8所示。从图8中可以看出,EtherCAT的主站同步滞后时间特别小,在10微秒左右,控制信息或者是驱动信息反馈可以在一个采样周期内完成传递。
5 结论
本文提出了一种基于EtherCAT总线协议的实时多机器人总线通讯策略。介绍多机器人协作控制系统的整体架构,并对该系统的软硬件进行整体的设计。根据双机器人系统的性能要求,采用主从式的EtherCAT通讯方式,并进行实际的主从任务分配,最后通过实际性能对比,验证该通讯方法具有较快的响应速度和较短的滞后时间。

图7 主站硬件结构图
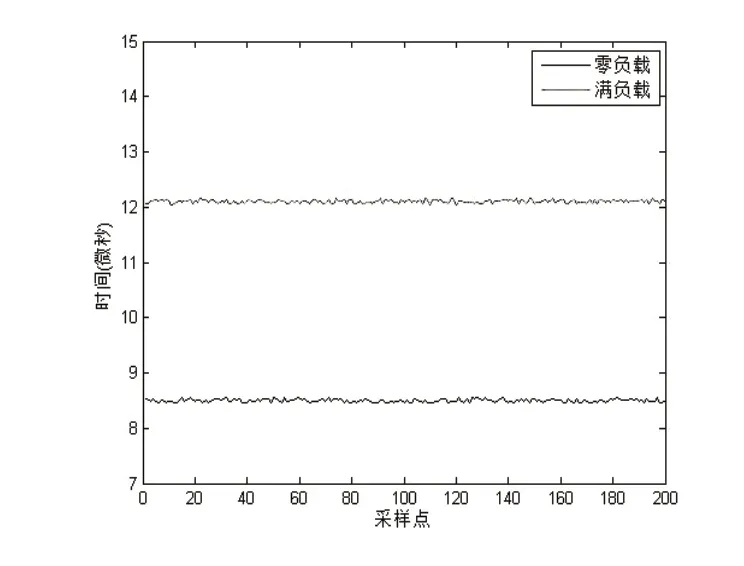
图8 同步滞后时间
[1] 苗卓广,谢寿生,何秀然,王海涛,吴勇,白玉.自适应PSO网络整定的航空发动机全程滑模控制[J].推进技术,2011,32(2):220-224,234.
[2] 吴军,徐昕,连传强,贺汉根.协作多机器人系统研究进展综述[J].智能系统学报,2011,6(1):13-27.
[3] 刘冬,闵华松,杨杰.基于EtherCAT的机器人控制总线方案研究[J].计算机工程与设计,2013,34(4).
[4] 刘鑫,闵华松,陈友东,王晟.基于EtherCAT的工业机器人控制器设计[J].计算机工程,2012,38(11):290-292.
[5] 李木国,尹永洁,刘于之,孙慧涛.基于PCIe总线接口的EtherCAT从站网卡设计[J].计算机测量与控制,2015,23(3):921-923.
[6] 蒋佳佳,段发阶,陈劲,张超,常宗杰,华香凝.链式系统中信号远距离传输延时的在线测量方法[J].吉林大学学报(工学版),2013,43(2):520-525.
