基于D-H参数法的二自由度并联机械手逆运动学求解
2015-04-25于丰博杨惠忠卿兆波
于丰博,杨惠忠,卿兆波
YU Feng-bo, YANG Hui-zhong, QING Zhao-bo
(中国计量学院 机电工程学院,杭州 310018)
0 引言
在食品、电子和医药等轻工业领域,需要机械手对轻小物料进行中、短距离的搬运、分拣、上下料等操作[1~3]。与串联机构相比,其重负荷比小,且具有精度高、刚度大、承载能力强等特点,故被广泛应用于高速操作场合[4]。天津大学Diamond机械手在医药、饮料包装中的成功运用充分体现了并联机械手的高速、可靠优势[5]。运动位置模型的快速、准确建立对机器人的定位精度控制及其产业化开发至关重要。因此,如何根据企业的不同需求,在最短时间内快速正确建立机械手运动模型具有重要的现实意义。
对二自由度的并联平动机械手——Diamond机构,由于其机械结构简单,国内学者多采用几何法建立运动学求解模型[1~2,5~6],但随着机械手自由度的增加,机构几何约束关系越复杂,求解难度也随之增大。而通过D-H参数法建立的机械手运动学逆解模型,具有很好的适用性,且求解简单快捷,并通过MATLAB编程验证模型的正确性。
1 系统描述及运动学求解
1.1 系统描述
如图1所示,并联机器人由两条支链(分别各有一个电机驱动)和动平台组成,各支链包含两个平行四边形机构(分别由机架-主动臂-支架-连架副主动臂;支架-从动臂-动平台组成)[1,7]。

图1 并联机器人
图2 为机器人中去除虚约束后的机构简图,即平面五连杆机构,P为末端位置点,l0、l1、l2分别为机架的半长、主动臂长度、从动臂长度。
1.2 连杆坐标系的建立及连杆参数的确定
在图2机架中间及两杆各关节处,根据John J. Craig对连杆坐标系建立的约定,确定了机械手的连杆坐标系[8~11],如图3所示。
基准坐标系{x0o0y0}建立在机架的中心位置;


图2 并联机器人控制机构简图
符号遵从右手法则;oij代表支链i(1, 左支链;2, 右支链)中第j(1 , 2关节序号)关节处坐标系原点。

图3 机械手各连杆坐标系
在对每根连杆建立坐标系的基础上由Craig法则得到各连杆参数,该规定如下[8,9]:
得到的左、右两支链各连杆参数分别如表1、表2所示。

表2 右支链连杆参数表
1.3 模型求解
将坐标系{i}经过旋转、平移使其与{i-1}重合,则{i}在{i-1}中的位姿描述(即{i}到{i-1}的坐标变换矩阵)为[8~10]:

式中c 代表cos( ),s 代表sin( ),以后均采用这种方法表示。
1)左支链末端位置求解
将表1中参数代入式(1)求得各变换矩阵:

从而得到各连杆坐标系对基坐标系的变换矩阵:

末端点P在基坐标系中的方位描述为:


利用末端在基坐标系中的位姿矩阵与末端在工具坐标系({x3o3y3})中位姿经坐标系变换之后在基坐标中的描述应该相等建立求解方程的基础:

令式(2)等号两端的(1,4)元素相等,式(3)等号两端的(2,4)元素相等,式(4)等号两端的(1,4)、(2,4)元素分别相等建立方程组,同时将各方程中
取非零及在取值范围内的解,即:

其中:


2)右支链末端位置求解
右支链主动臂转角的求解过程与左支链雷同,此处不再赘述,最终求得:

2 模型验证

图4 末端运动轨迹
将图4中末端运动轨迹中特殊点坐标值及各连杆长度代入式(11)、式(14),求得转角与作图法获得准确转角对比分别如图5中(1,1)、(2,1)(图5中呈矩阵排列的图)所示,特殊轨迹点相关参数分别如表3、表4所示;将轨迹特殊点处各关节转角及连杆长度代入式(2)等号右边矩阵(1,4)、(2,4)元素中,求得末端点在基坐标系中位置坐标与作图法获得准确坐标对比分别如图5中(1,2)、(2,2)所示。
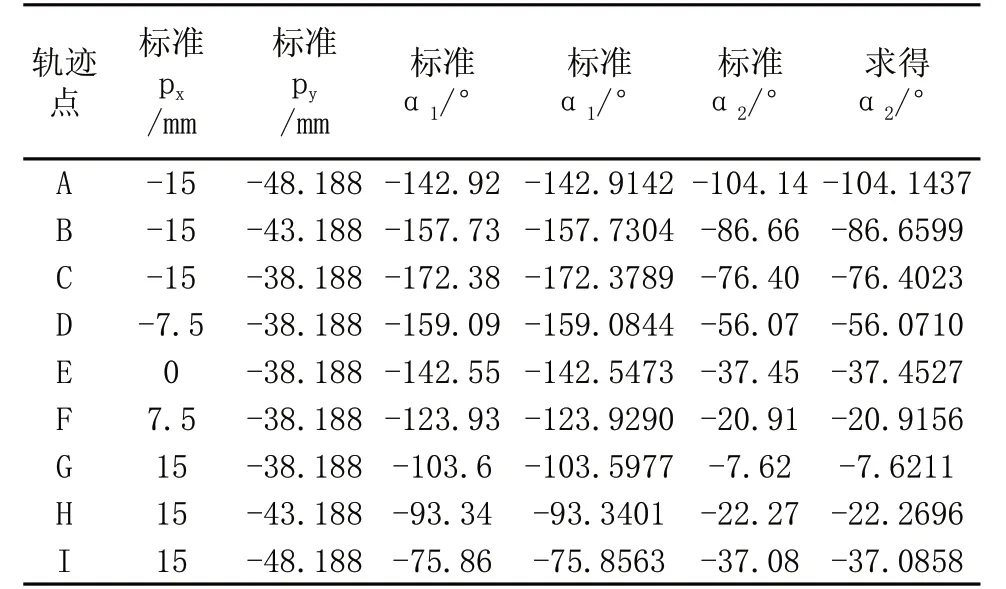
表3 末端轨迹点转角对比相关参数表

表4 末端点位置对比相关参数表


图5 主动臂转角及末端轨迹对比图
由表3、表4及图5可以看出通过模型求得主动臂转角、末端点位置分别与标准转角及标准末端位置值吻合一致,证明了模型建立的正确性。
3 结论
总观整个求解过程,对两个及以上自由度机械手只需确定相应的连杆参数通过矩阵坐标变换即可求得机械手末端位置逆解表达式。相比以往大多采用的几何法,D-H参数法不必寻找连杆间几何位置关系(自由度越多,几何关系越复杂,建立模型的难度就越大),关节转角满足右手法则即可,具有更好的适用性。同时可以大大的缩短企业对满足特定需求的机械手的研制周期,具有重要的现实意义。
[1] 梅江平,王攀峰,倪雁冰.二平动自由度高速并联机械手位置控制[J].组合机床与自动化加工技术,2004,04(7):7-8.
[2] 李占贤,黄田,梅江平.二平动自由度高速轻型并联机械手控制技术研究[J].机器人,2004,26(1):63-65.
[3] 许礼进,刘有余,刘阳.DELTA机器人逆运动学的分析与控制[J]. 制造业自动化,2014,36(9):66-67.
[4] Alain Codourey. Dynamic Modeling and Mass Matrix Evalution of the DELTA Parallel Robot for Axes Decoupling Control[J]. Institute of Robotics,1996:1211-1212.
[5] 梁香宁.Delta机器人运动学建模及仿真[D].太原:太原理工大学,2008:7-19.
[6] 李占贤.高速轻型并联机械手关键技术及样机建造[D].天津:天津大学,2004:14-17.
[7] Maira M.da Silva, Leopoldo P.R.de Oliveira, Olivier Bruls etal. Integrating structural and input design of a 2-DOF highspeed parallel manipulator: Aflexible model-based approach[J]. Mechanism and Machine Theory,2010,45:1509-1511.
[8] John J. Craig. Introduction to Robotics: Mechanics and Control [M].Third Edition. Beijing:China Machine Press,2005:19-128.
[9] 蔡自兴,谢斌.机器人学[M].第三版.北京:清华大学出版社,2015, 19-60.
[10] 张福学.机器人技术及其应用[M].北京:电子工业出版社, 2000:165-219.
[11] Stefan Staicu. Matrix modeling of inverse dynamics of spatial and plannar parallel robots[J]. Multibody Syst Dyn,2012,27:240-244.
