二阶滑模控制方法及其对环形倒立摆的控制应用
2015-04-25孙灵芳
孙灵芳,邢 宇,李 斌
SUN Ling-fang, XING Yu, LI Bin
(东北电力大学 自动化工程学院,吉林 132012)
0 引言
滑模控制方法是在二十世纪60年代由前苏联学者Utkin和Emelyanov提出的一种控制方法,实质上是一种非线性的控制,表现为控制的不连续性.该控制特性可以迫使系统在在一定特性下沿规定轨迹作小幅度、高频率的上下运动[1]。这种控制的不连续性表现为不连续的控制量出现在滑模变量s的一阶导数中,所以称传统滑模为一阶滑模。滑模变量的一阶导数的不连续性导致滑模控制存在“抖振”现象,这在实际工作中具有很大的危害.近几十年来,科研工作者们一直在寻找抑制“抖振”现象的方法,如“边界层”法、滤波方法、高为炳提出的“趋近律”法等。在此期间,由Levant提出的高阶滑模控制方法得到了广泛的关注.高阶滑模不但可以保持传统滑模具有的优点,而且可以有效地抑制了传统滑模控制产生的“抖振”,从而提高了控制的精度[2]。
1 高阶滑模的定义
首先介绍滑动阶(Sliding Order)的定义[3]:
定义1 滑动阶r是指滑模变量s的连续全导数(包括零阶) 在滑模面s=0上为0的数目.
高阶滑模的定义是由Levant和Firdman在1966年给出的,如下:
定义3 对于一个光滑的动态系统,滑模面s为光滑函数,r阶滑动集是非空的,并且由不连续动态系统的Filippov轨迹组成,则满足相关运动称为关于滑模面 0),( =xts 的“r阶滑模”。
2 二阶滑模控制
根据高阶滑模的定义可以知道,当且仅当系统轨迹位于状态空间s=0和交界处时,系统具有二阶滑模动态。
最早使用的高阶滑模控制就是二阶滑模控制,近几年,二阶滑模仍然运用非常广泛,者正是由于二阶滑模控制的控制器结构简单,并且所需要的信息量不多。常见的二阶滑模控制算法有三种,分别是螺旋(Twisting)算法、超螺旋(Super-Twisting)算法和给定收敛律(Prescribed Convergen Law)算法[4,5],下面主要介绍超螺旋算法。
2.1 问题描述
考虑如下非线性系统:

其中 ∈x Rn为系统状态量, ∈u R为控制输入,f(t,x)和g(t,x)为不确定光滑函数,s=s(t,x)为滑模面。二阶滑模控制的目标是使系统状态在有限的时间内到达滑模面s=s(t,x)并且具有二阶滑动模态。
2.2 超螺旋(Super-Twisting)算法
超螺旋算法与其他二阶滑模算法相比存在着特殊之处,它仅仅需要滑模变量s的信息,而且当控制系统的相对阶为1时,利用超螺旋算法可以避免抖振。它的相轨迹是在 sso˙相平面上绕原点螺旋扭转,在有限的时间内收敛到原点。
超螺旋算法的控制器由两个部分组成,其中第一部分为其对时间不连续的导数项,第二部分为滑模变量s的连续函数,控制器的具体形式如下:

为了保证算法在有限时间收敛,则应满足以下条件:

3 单级环形倒立摆的建模
倒立摆往往用来验证一种理论的正确性和在实际应用中的可行性,是一个非线性、不稳定的被控对象。目前有许多对小车驱动直线倒立摆的控制研究,但是这种直线倒立摆有很多传动装置,存在误差导致实验失败。与此相比,环形倒立摆没有小车的拖动和连杆的行径限制,所以对于控制情况来说有很大的改善。

图1 环形倒立摆模型示意图
单级环形倒立摆模型由一个连杆、一个摆杆和一个质量块组成[6,7],如图1所示。其中θ1为连杆与水平Y轴的夹角,θ2为摆杆与垂直方向上的夹角,顺时针为正。在距离摆杆转动中心l处取一小段dl,这一小段的坐标为:

则这一小段的动能为:

系统的总动能为:

其中Tm1代表连杆动能,为:

Tm2代表摆杆动能,为:

Tm3代表质量块动能,为:

以摆杆静止下垂时的质心为0势能位置,则系统的势能为:


可以解得:


表1 参数物理意义及数值
将式在平衡位置进行泰勒级数展开并线性化[7],令会得到状态空间方程如下:其中:

4 环形倒立摆的起摆及稳定控制仿真结果
在使用滑模变结构控制控制被控对象时,需要做两部分工作:第一部分是控制器的设计;第二部分为滑模面的设计。本文使用超螺旋算法的控制器,下一步就是对控制器中的滑模函数s进行设计以达到控制需求。
1)设计滑模函数为:
其 中c 必 须 满 足Hurwitz 条 件,即c >0,为理想的角度信号。
经过不断的试验,取参数w=2,s0=100,λ=500,ρ=0.5,c=0.05,Simulink仿真模块如图2所示。
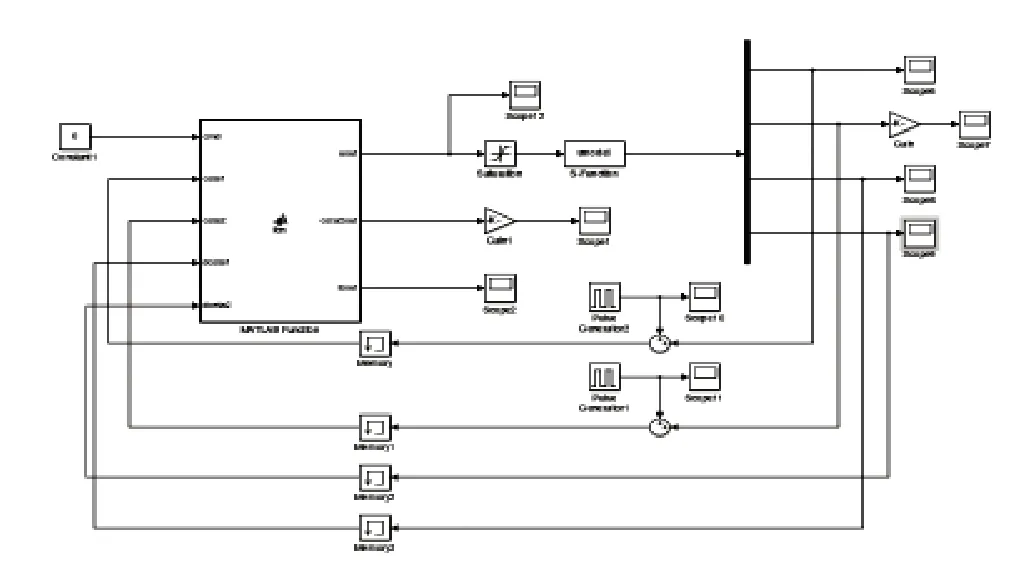
图2 Simulink仿真模块图

图3 摆杆、连杆角度仿真曲线

图4 摆杆、连杆角速度仿真曲线

图5 控制仿真曲线
由仿真结果可以看出,利用超螺旋算法的控制器可以使摆杆角度竖直稳定,起摆时间2s左右,并且2s后稳定,在第12s加入干扰脉冲,在小于1s内恢复平衡,鲁棒性较好。但是结果同样可以看出不能保证连杆角度稳定,由连杆的角度与连杆的角速度曲线可以明显看出被控量发散,不能保证稳定且控制量抖振较大。
2)采用Ackermann公式设计滑模函数[8,9]:

Ackermann公式描述为:
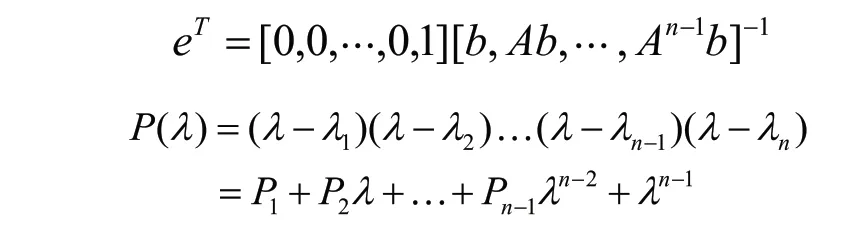
矩阵A和向量b由系统的状态空间方程得到,此时向量b即是系统状态空间方程中的矩阵为系统的特征多项式,是系统期待的特征值,从而可以算出C的值。

取参数 1=ω ,s0=500,λ=5,仿真结果曲线如下:

图6 摆杆角度曲线图

图7 连杆角度曲线图

图8 摆杆角速度曲线图

图9 连杆角速度曲线图
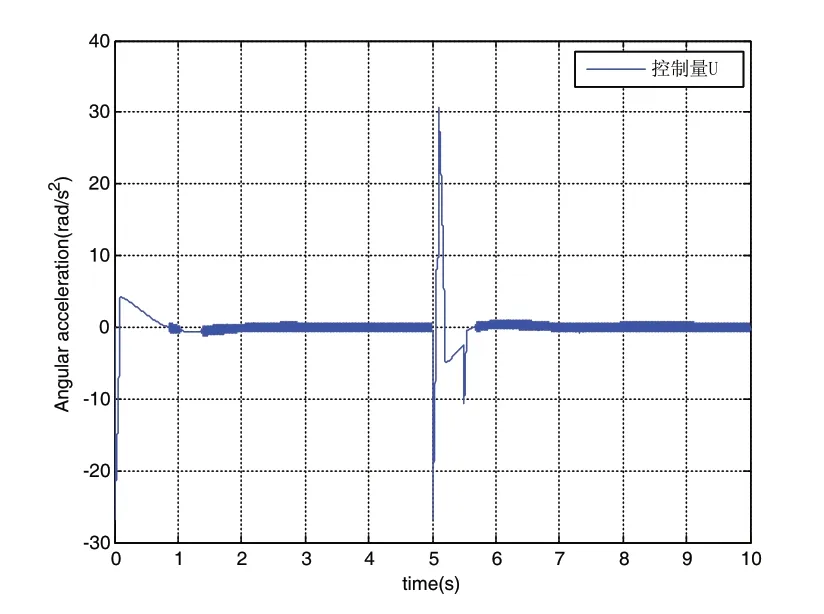
图10 控制量曲线图
由仿真曲线可以看出,利用Ackermann方法配置滑模面,可以保证四个被控量全部达到稳定状态。在第5s时加入幅值为0.1,周期为10的脉冲信号作为干扰信号,由仿真结果可以看出:系统在2.5s左右可以快速稳定,相比较第一种滑模面,第二种稳定的时间大于第一种,但是超调量小于第一种使用滑模面的控制,并且抖振明显减小。
5 结束语
本文利用了Lagrange方程完成了环形倒立摆的系统建模,使用了二阶滑模超螺旋算法对环形倒立摆进行了简单的控制。根据仿真结果,二阶滑模控制克服了边界层法牺牲系统鲁棒性的缺点,保留了传统一阶滑模的主要优点和提高了控制精度,而且可以有效地削弱抖振.但是用二阶滑模控制器时,主要的困难是如何让调整不同算法的参数,尽管这样,二阶滑模控制仍然可以解决一大类控制问题。
[1] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
[2] Arie Levant.Higher order sliding modes,differentiation and outputfeedback control[J].Internation-al Journal of Control,2003,76(9--10):924-941.
[3] Arie Levant.Higher order sliding modes as an natural phenomenon in control theory[J].Robust control via variable structure an Lyapunov techniques,1996,217:107-133.
[4] Arie Levant.Homogeneity approach to high-order sliding mode design[J].Automatica,2005,41(5):823-830.
[5] Arie Levant.Principles of 2-sliding mode design[J].Automatica,2007,43(4):576-586.
[6] 王东亮,刘斌,张曾科.环形一级倒立摆起摆及稳定控制研究[J].微计算机信息,2007,23(2-1),1-2.
[7] 张姝,朱善安.环形单级倒立摆起摆控制研究[J].江南大学学报(自然科学版),2004,3(5):482-485.
[8] 孟祥萍,薛昌飞,张化光.基于Ackermann公式的分散滑模负荷频率控制[J].东北大学学报(自然科学版),2000,21(2):128-131.
[9] 彭亚为,杜彬,陈娟.基于Ackermann公式的滑模控制设计方法[J].北京化工大学学报(自然科学版),2011,38(4):128-133.
