基于改进IMM的机动目标跟踪算法
2015-04-20徐貌夫
摘 要:针对地面机动目标跟踪,提出了一种改进的交互式多模型算法,该算法在多模型中使用了基于新息的模型选取策略,解决了先验知识缺失情况下的机动目標跟踪问题。同时,基于新息的变化对“当前”统计模型进行改进,使之能够自适应调整最大加速度的大小。改进后的算法有效地处理了对未知目标先验知识不足的问题,更利于工程的实现。最后进行了Monte Carlo仿真,仿真结果表明所提出的算法保证跟踪精度的同时能够有更好的反应时间。
关键词:机动目标跟踪;卡尔曼滤波;交互式多模型算法
1 算法的模型集合
IMM算法需要对目标运动状态模式有一个评估并选择若干个恰当的模型。文章设计的模型集合采用CV模型、“当前”统计模型和CA模型。“当前”统计模型的过程噪声同加速度的方差有着直接的联系,因此系统的加速度的方差受到加速度的极限值Amax的影响,而该值又需要进行人为的设定,不同加速度极限值的大小对目标加速度的方差有着直接的影响,进而对系统的过程噪声产生影响[5]。根据卡尔曼滤波的基本原理,当目标发生机动时,原有模型的不匹配会导致滤波新息的增加。因此可以将目标的新息作为算法的特定输入参数,通过检测到的新息的大小变化来实时地调整算法中的当前模型的最大加速度数值,从而进一步调整模型的过程噪声。鉴于此,参考模糊控制的基本思想,以目标的新息作为一个算法的输入参数,根据不同情况下新息的值来实时对最大加速度的值进行调整,进而优化目标的过程噪声。在本算法中目标的机动状态使用新息来进行表述,设计出一个参数称为目标的机动值?浊,算法工作过程中根据目标机动值的大小来设置对应于其所代表的目标机动状态下的加速度最大值,进而调节目标的过程噪声,经过数学变换,在得到不同的机动值?浊之后便可以判定目标最大加速度的大小,从而进一步对系统的过程噪声进行调节。为了避免跟踪过程中一些多余的干扰和对算法复杂度的过度增加,本系统中将变换函数设置为阶梯型函数。
2 改进的IMM算法
(1)初始化。初始化,包括初始状态向量X0(0|0),初始协方差矩阵P0(0|0)。(2)各模型独立并行滤波。通过坐标转换,将量测到的角度信息和距离信息转换到直角坐标系中进行处理。各模型之间相互独立,采用去偏转换测量卡尔曼滤波算法,得到每一时间节点的相应滤波数值。(3)基于新息变化判断选择相应的模型滤波结果计算输出。
3 仿真分析
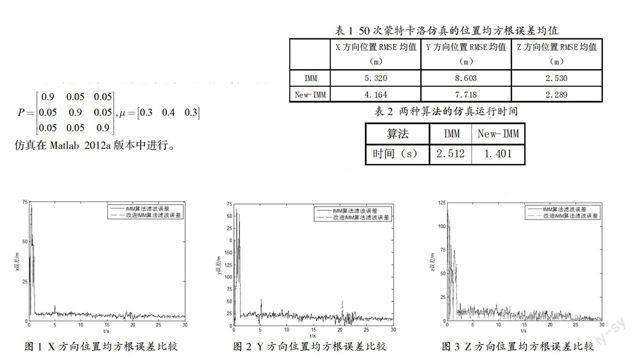
通过仿真实验对上述的算法进行验证,并与IMM算法进行比较。假设目标在三维空间的运动轨迹为:初始位置(5000m,5000m,30m),初始速度为(5m/s,5m/s,0m/s),地面目标在Z轴方向上的运动变化主要受到地势的影响。目标在前5s做匀速直线运动,在之后15s内做蛇形变速机动,接着10s内做匀加速运动。采样周期为20ms。原IMM算法中模型转移概率和模型初始概率分别为:
仿真在Matlab 2012a版本中进行。
图1-图3分别为两种算法在三个方向上的距离均方根误差比较;表1为两种算法在三个方向上的均方根误差均值比较;表2为两种算法的仿真时间比较。从图1-图3可以看出,在目标做匀速和匀加速运动时,两种算法的跟踪效果差别不大。当目标进行蛇形机动时,由于量测信息发生突变,量测噪声变大,基于新息判断的简化IMM算法能够更快的收敛。从表1中可以看出,基于新息判断的IMM算法在滤波精度上略优于IMM算法,表2中可以看出,基于新息判断的IMM算法的反应时间明显优于IMM算法。
表1 50次蒙特卡洛仿真的位置均方根误差均值
表2 两种算法的仿真运行时间
从算法进行分析,改进后的算法中,通过新息的大小来调整机动值参数,根据不同机动值变化来调节模型中最大加速度的绝对值,进而改变模型的过程噪声,在某一段范围内保持目标的最大加速度不改变,使得模型的过程噪声不会发生频繁的跳变,一定程度上提高了系统的稳定性,保证了系统的精度。这表明,当先验知识缺失或者发生错误时,该算法能够有效的保证滤波跟踪效果,且更易于工程实现。
4 结束语
通过对卡尔曼滤波中的新息参数的运用,对“当前”统计模型和IMM算法进行了改进,提出了基于新息判断的IMM算法,解决了当缺少先验知识时,IMM算法参数无法设置的问题。仿真结果表明,针对地面目标所提出的算法滤波精度与传统IMM算法类似,但是提高了反应时间,降低了算法的实现要求。
参考文献
[1]刘建书,李人厚,刘云龙.基于“当前”统计模型的交互式多模型算法[J].系统工程与电子技术,2008,30(7):1351-1353.
[2]Wei Mei,Zhihua He,Guanhui Liang. Iterated Debiased Kalman Filter for Target Tracking with Converted Measurements[J].IEEE International Conference on Information Science and Technology,2012,4(12):185-189.
[3]Mo Longbin, Song Xiaoquan,Zhou Yiyu,etal.Unbiased Converted Measurements for Target Tracking[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(3):1023-1027.
[4]丁振,潘泉,张洪才.新息滤波交互式多模型噪声辨识算法[J].电子学报,1997,25(5):95-98.
作者简介:徐貌夫(1989-),男,江苏连云港人,南京理工大学硕士研究生,主要研究方向为目标跟踪与信息融合。
