3—RRR交错轴型平面柔性机构设计与分析
2015-04-20赵鹏

摘 要:文章利用柔性铰链替代刚性铰链的设计方法,结合3-RRR型平面平台的刚性结构图设计了一个新的3-RRR型平面柔性平台,并运用平面二自由度并联机器人运动学正解方法,对该型平台进行运动学正解的理论分析。在获得正解结果的基础上,结合有限元仿真分析,对所得输出位置结果进行验证,在满足误差?芨10%的情况下,证明了有限元分析结果与理论结果是一致的,且该模型可做位移或平面力传感器使用。文章所做的研究也为新型多自由度平面型柔性平台的运动学分析提供借鉴。
关键词:柔性铰链;3-RRR型平台;运动学分析;有限元分析
1 绪论
随着微纳米科技的兴起与不断发展,具有高精度的精密定位机构在近代科学的研究领域和尖端工业生产中扮演着重要的角色。由弹性元件构成具有低误差、无摩擦、空间小等优点的柔性机构,逐渐引起了微精密工程设计人员的广泛关注。少自由度并联机器人由于其驱动元件少、造价低、结构紧凑、误差小、精度高等优点。近年来平面柔性平台的应用成为机构学领域中研究的热点。具体应用[1]包括:扫描探针显微镜和计量仪、纳米探针扫描、内存存储器、硬盘驱动器及生物成像等设备。
文章以3-RRR型平面柔性平台为研究对象,利用二自由度平面机构的运动学[2]知识对其进行运动学正解的理论分析,得出输入位移与输出位移之间的关系。再结合柔性铰链、伪刚体模型[3]的知识,将3-RRR型平台三自由平台中的转动副用交错轴柔性铰链进行替换,得到所需柔性机构。并利用有限元分析[4,5]对运动学正解进行验证。而且文章所设计的平台可以采用转动电机驱动,结构简单。
2 3-RRR平面柔性机构并联设计
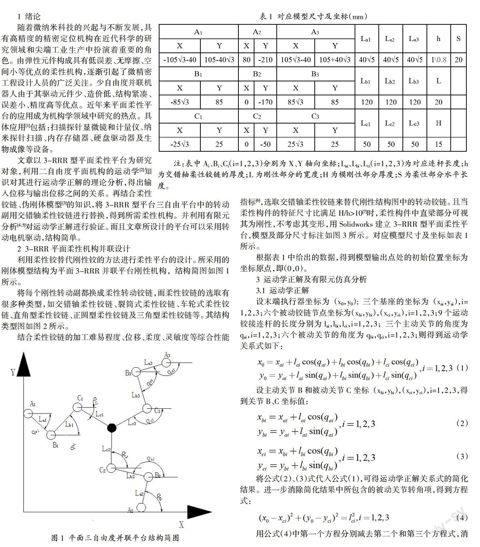
利用柔性铰替代刚性铰的方法进行柔性平台的设计。所采用的刚体模型结构为平面3-RRR并联平台刚性机构,结构简图如图1所示。
将每个刚性转动副都换成柔性转动铰链,而柔性铰链的选取有很多种类型,如交错轴柔性铰链、裂筒式柔性铰链、车轮式柔性铰链、直角型柔性铰链、正圆型柔性铰链及三角型柔性铰链等。其结构类型图如图2所示。
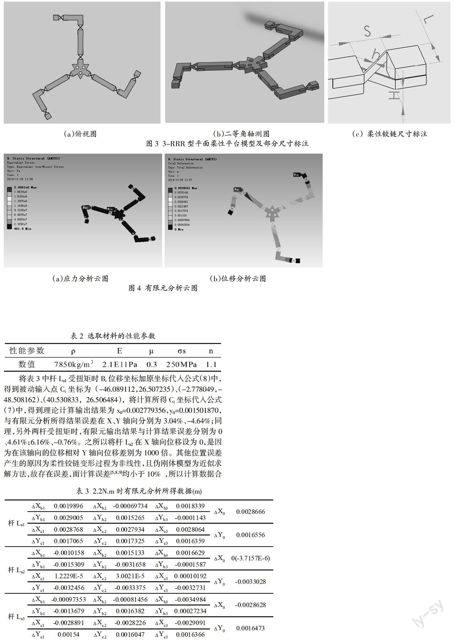
结合柔性铰链的加工难易程度、位移、柔度、灵敏度等综合性能指标[6],选取交错轴柔性铰链来替代刚性结构图中的转动铰链。且当柔性构件的特征尺寸比满足H/h>10[7]时,柔性构件中直梁部分可视其为刚性,不考虑其变形,用Solidworks建立3-RRR型平面柔性平台,模型及部分尺寸标注如图3所示。对应模型尺寸及坐标如表1所示。
根据表1中给出的数据,得到模型输出点处的初始位置坐标为坐标原点,即(0,0)。
3 运动学正解及有限元仿真分析
3.1 运动学正解
设末端执行器坐标为(x0,y0);三个基座的坐标为(xai,yai),i=1,2,3;六個被动铰链节点坐标为(xbi,ybi),(xci,yci),i=1,2,3;9个运动铰接连杆的长度分别为lai,lbi,lci,i=1,2,3;三个主动关节的角度为qai,i=1,2,3;六个被动关节的角度为qbi,qci,i=1,2,3;则得到运动学关系式如下:
(1)
设主动关节B和被动关节C坐标(xbi,ybi),(xci,yci),i=1,2,3,得到关节B、C坐标值:
(2)
(3)
将公式(2)、(3)式代入公式(1),可得运动学正解关系式的简化结果。进一步消除简化结果中所包含的被动关节转角项,得到方程式:
用公式(4)中第一个方程分别减去第二个和第三个方程式,消去其中所包含的关于末端执行器坐标的而此项,并得到如下的二元一次方程组:
(5)
在式(5)中,对di的定义如下式:
(6)
由公式(2)、(3)、(6)可知,在基座坐标和连杆长度都已知的情况下,di和(xci,yci)i=1,2,3,的值完全由主动关节转角决定,因此当qai,i=1,2,3已知时,对公式(5)进行求解方程组从而得输出平台的X,Y轴向的运动学正解为:
(7)
对整个柔性平台而言,实际输入点为B1、B2、B3,需将上述公式中的(xci,yci),i=1,2,3,进行处理,结合刚性结构件图,得出转化公式如下:
(8)
式中:ldi,i为C1、C2、C3之间的距离。
在求出末端执行器坐标(x0,y0)后,求出对应被动关节qci,i=1,2,3角度,同理也可求出qci,i=1,2,3角度。
(9)
3.2 有限元仿真分析
将所绘制模型导入有限元分析软件中,选取模型材料为结构钢,并自动进行网格划分,对输入杆1、2、3分别施加2.2N.m的扭矩,分别测出对应主动输入点Bi和被动输入点Ci及输出点(x0,y0)在X、Y轴向的位移。材料性能参数及输入为1N.m时所测得数据如表2、表3所示。
表2 选取材料的性能参数
将表3中杆La1受扭矩时Bi位移坐标加原坐标代入公式(8)中,得到被动输入点Ci坐标为(-46.089112,26.507235)、(-2.778049,-48.508162)、(40.530833, 26.506484),将计算所得Ci坐标代入公式(7)中,得到理论计算输出结果为x0=0.002779356,y0=0.001501870,与有限元分析所得结果误差在X、Y轴向分别为3.04%、-4.64%;同理,另外两杆受扭矩时,有限元输出结果与计算结果误差分别为0 、4.61%;6.16%、-0.76%。之所以将杆La2在X轴向位移设为0,是因为在该轴向的位移相对Y轴向位移差别为1000倍。其他位置误差产生的原因为柔性铰链变形过程为非线性,且伪刚体模型为近似求解方法,故存在误差,而计算误差[5,8,9]均小于10% ,所以计算数据合理。通过有限元分析及理论分析得出计算结果是一致的,也证明了设计的合理性。
通过有限元分析获得的应力云图和位移云图如图4所示。从应力云图、位移云图以及材料的最大许用应力和安全系数可以得出,当输入杆为1时,所对应的输出点处位移范围从(-0.0028666,-0.0016556)到(0.0028666,
0.0016556)。同理也可以得出另两个输入杆为主动输入时所对应输出位移范围。
4 结束语
文章利用结构简单的3-RRR型刚体结构图为基础 ,通过运动学正解分析,得出输入点与输出点的关系式。结合柔性机构的特点,将刚体模型结构图中的转动副用易于加工、灵敏度高等特点的交错轴柔性铰链进行替代,得到具有三自由度的柔性平台模型。通过有限元分析软件,对所建模型进行分析,将分析结果通过运动学正解公式求解,并对比理论分析与有限元分析结果,误差小于10%。说明运动学正解正确,同时也说明了建立的模型比较精确,可以直接用于其它尺寸的同样模型来分析,而且该模型可以做位移或平面力传感器使用。
参考文献
[1]Shorya Awtar,Gaurav Parmar.Design of a large range XY nanoposition system[J].2010:1-13.
[2]叢爽,尚伟伟.并联机器人——建模、控制优化与应用[M].电子工业出版社,北京,2010.
[3]Howell.Compliant mechanisms[M].New York:John Wiley & Sons,2001.
[4]马立,谢炜,等.柔性铰链微定位平台的设计[J].光学精密工程,20l4(22):338-345.
[5]张霖,王建华.单平行四杆柔性铰链机构刚度特性分析[J].华东交通大学学报2013,12(30):55-58.
[6]Brian P. Trease.Design of Large-Displacement Compliant Joints[J].Journal of Mechanical Design,2005:788-798.
[7]刘庆铃.变截面柔性铰链变形分析计算方法[J].机械设计,2010,4(27):14-16.
[8]邵珠峰,唐晓强,等.平面柔性3-RRR并联机构自标定方法[J].机械工程学报,2009,3(45):150-155.
[9]沈剑英,杨世锡等单平行四杆柔性铰链机构的输出位移和耦合误差分析[J].机床与液压,2004(3):27-28.
作者简介:赵鹏(1984-),男,汉族,辽宁抚顺人,在读硕士,研究方向:机械制造。
