混合星座条件下的多星定轨及其精度
2015-04-20胡光明李晓杰
胡光明,郭 睿,李晓杰,吴 杉
北京卫星导航中心,北京, 100094
混合星座条件下的多星定轨及其精度
胡光明,郭 睿,李晓杰,吴 杉
北京卫星导航中心,北京, 100094
为了实现与确保区域导航服务能力,COMPASS设计采用GEO/IGSO/MEO混合星座,利用区域监测网完成卫星轨道测定与预报,并通过预报星历确保导航服务。在区域布站条件下,难以实现对IGSO/MEO卫星的全弧段跟踪;混合星座条件下,不同卫星的动力学特性存在一定的差异,尤其是首次采用GEO卫星,其静地特性致使轨道与钟差强相关,为动力学模型选取带来一定的困难。这些不利因素都给轨道确定带来一定的挑战。本文给出了区域监测网条件下多星定轨的测量模型与动力学模型,设计了轨道与钟差参数的解算方案,系统地分析与论证了区域布站条件下的混合星座定轨精度。试验表明,卫星三维位置精度优于2m,基于激光数据检验的GEO卫星轨道预报2h视向精度优于0.3m,IGSO卫星轨道预报6h视向精度优于0.4m。
COMPASS系统;多星定轨;卫星激光测距数据;GEO;IGSO;MEO
1 引 言
COMPASS系统采用GEO/IGSO/MEO混合星座设计,以三个频点码分多址编码方式,同时提供导航定位授时(Position-Navigation-Timing, PNT)等基本服务与差分服务[1]。此外,还通过星座中的GEO(Geostationary Earth Orbit)卫星提供短报文通信和位置报告、 双向定时等RDSS(Radio Determination Satellite Service)服务。
受限于地理分布有限的区域测轨监测网,COMPASS系统无法实现对IGSO/MEO导航卫星轨道的完全覆盖。在区域监测网内,IGSO(Inclined GeoStationary Orbit)卫星每天约有4个小时不可视,而MEO(Medium Earth Orbit)卫星每天仅有30%的可视弧段,与全球布站的GPS(Global Positioning System)系统相比,有限的跟踪弧段为高精度轨道测定与预报带来诸多不利因素。
同时,COMPASS系统混合星座设计中,不同类型的卫星高度、姿态控制方式、卫星平台和有效载荷均存在一定的差异,为动力学模型的建模带来一定的挑战,特别是以太阳光压模型为主的动力学模型建模误差,是制约混合星座定轨与预报精度的关键因素。
GEO卫星的采用为COMPASS混合星座定轨带来新的难题。影响GEO卫星定轨精度的因素主要有两方面:一是高轨卫星的几何跟踪条件受到局部跟踪网的限制,同时GEO卫星的静地特性使得跟踪几何几乎不变,导致地面站对卫星的动力学约束强度非常弱;二是目前广泛采用的GEO测轨技术具有较显著的系统误差,对定轨误差影响较大,并且预报精度随时间衰减较为明显[2]。
常用的定轨模式包括单星定轨和多星定轨。其中,单星定轨主要利用地面站对单颗卫星测轨数据独立进行轨道处理,多星定轨可以联合地面站对所有在轨卫星的测轨数据进行综合处理。前者由于测轨数据有限,同时,单星条件下不利于各类误差的分离,因此定轨精度稍低,主要用于卫星入网或机动后快速恢复;后者能够充分利用整网观测数据,对卫星钟差和测站钟差进行建模或约化处理,同时,对单个测站或单颗卫星的公共误差进行建模,有利于各类误差的分离,从而提高定轨精度,是目前最常用的定轨模式。
因此,在区域布站和混合星座的特殊条件下,如何实现COMPASS混合星座的多星整网轨道测定,是一个需要深入研究的问题。本文给出了多星定轨的数学模型,设计了多星整网定轨解算策略,利用实测数据对区域网络跟踪条件下的定轨精度进行了分析论证,得到了一些有益的结论。
2 多星定轨原理
为了实现全星座条件下的多星定轨,设计采用中国区域内地面站的伪距、相位无电离层组合观测量进行综合处理,在轨道确定的同时,能够实现对卫星钟差和测站钟差的有效估计。
2.1 测量模型及动力学模型
测量型接收机不仅能够进行伪距观测,而且可以获得更高精度的相位数据。因此,多星定轨可以综合采用伪距与相位数据进行联合定轨,在轨道确定的同时,实现对卫星钟差与测站钟差的估计。多星定轨中一般采用批处理最小二乘方法进行精密轨道确定。
多星定轨采用的数据为伪距、相位双频无电离层组合,其观测方程可以表示为[3]:

(1)

(2)
卫星精密定轨所采用的动力学模型是影响定轨精度的重要因素。卫星动力学模型也称摄动力模型,用于描述卫星受到的摄动力对卫星运动产生的加速度。卫星受到的摄动力可分为两大类:保守力摄动和非保守力摄动。其中,保守力摄动又分为N体摄动、与地球引力位相关的摄动、相对论效应摄动三种,与地球引力位相关的摄动又可分为地球形状摄动、固体潮摄动、海潮摄动、大气潮摄动、地球自转形变摄动五类;非保守力摄动包括太阳辐射压摄动和周期性RTN摄动[4]。对于GEO与IGSO卫星来说,其动力学模型的最大误差来自于太阳辐射压模型的误差。本文在进行精密定轨研究时,采用的主要动力学模型见表1。
表1 动力学模型

摄动力模型N体摄动DE403太阳、行星摄动重力场EIGEN-GRACE02S10×10太阳辐射压GPST20地球固体潮IERS-Conventions1996经验力轨道T/N方向调和函数
2.2 定轨解算策略
多星定轨试验采用国内7个地面站的观测数据,定轨弧长为3天,数据采样率为60秒。估计参数包括初始时刻卫星位置、速度,太阳辐射压摄动系数,辐射压y-bias,T/N方向经验力参数,各监测站大气天顶延迟,相位模糊度以及所有历元的钟差参数。
IGS(International GNSS Service)计算表明,采用经验太阳辐射压模型可以模制辐射压对卫星轨道的主要摄动影响,但仍存在一定残余误差,因此,精密定轨还需要估计经验力参数对残余误差进行模制。从轨道误差看,受地面站的约束,轨道径向误差可以得到较好的控制,但轨道的沿迹方向和轨道面法向的误差较难控制,因此,需要在轨道迹向和法向增加经验力参数加以模制,吸收光压模型的残余误差。
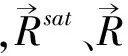
采用多星定轨还可以估计观测模型参数,如接收机的大气天顶延迟。由于常用的大气折射误差模型SAASTAMOINEN可以较好地模制干大气折射误差,而湿大气部分受局部水汽压影响较难精确模制,因此,多星定轨一般采用分段估计大气天顶延迟方式来降低大气模型误差对精密定轨的影响。多星定轨估计的大气参数为大气模型在常温常压下计算修正值的修正因子。假设在3天的定轨弧段内一个接收机估计M个天顶延迟参数,假定某时刻ti满足ttrop(k) (3) 式中,dt为归一化的时差参数,trop_ori为采用SAASTAMOINEN模型在常温常压下计算的斜路径大气折射改正。 xtrop(k)(k=1,…M)为该接收机估计的第k个大气参数。 ttrop(k)(k=1,…M)为第k个大气参数对应的时刻。 对大气参数进行线性化,第ti时刻对第k和k+1个大气参数偏导数为: (4) 将大气参数与其他参数一起进行最小二乘平差,可得到大气估计值。 考虑到卫星钟差和测站钟差可能存在不规则变化,多星定轨解算需对卫星钟差和测站钟差进行单历元建模,即每个历元设置一个卫星或测站钟差参数。对同一历元,多星定轨只需要估计M+N(M为卫星钟差个数,N为测站钟差个数)个钟差参数 (实际由于秩亏只能获得M+N-1个独立的钟差参数估计)。而对整个定轨弧段,多星定轨需要估计Nepoch(M+N-1)个钟差参数, 其中Nepoch为数据历元数。以60秒数据采样计算,1天多星定轨需要估计多达1440×(M+N-1)个钟差参数(未考虑不可视弧段)。 大量钟差参数的估算需要耗费大量的计算资源,为提高处理效率,多星定轨需采用钟差约化算法,逐历元约化钟差参数。其基本思想是将待估参数分为全局参数和钟差参数两类,首先,通过逐历元对钟差参数进行约化,消去卫星钟差和测站钟差,仅解算所有动力学参数、大气延迟尺度参数和相位模糊度等全局参数;然后,将全局参数回代解算所有测站钟差和卫星钟差,从而减小法方程大小,降低存储空间,加快求解速度。解算钟差时需设置基准,原则上可以选取任一定轨测站的站钟作为时间基准。相关原理详见文献[5]。 采用多星定轨方法对COMPASS系统混合星座进行整网处理。采用2013年3月3日~6日共3天弧长的数据进行定轨试验,在轨卫星包括5颗GEO、5颗IGSO以及4颗MEO,共14颗卫星,地面站共7个站的伪距相位数据参与测定轨。 本文采用内符合与外符合评估相结合的方法对多星定轨精度进行综合评估。其中,内符合精度评估方法包括定轨残差和重叠弧段法,外符合精度评估指利用卫星激光测距数据(Satellite Laser Ranging, SLR)评估轨道视向精度的方法。 3.1 定轨残差精度分析 定轨得到每颗卫星与每个测站的伪距、相位残差。例如GEO-1卫星,其定轨残差为7个测站对该星的定轨残差统计值,参考站的定轨残差为14颗卫星对该站的定轨残差统计值。各测站与各卫星的伪距、相位无电离层组合残差如图1所示。3天弧段区域网定轨伪距残差RMS(Root Mean Square)优于50cm,相位残差RMS优于1cm,与区域GPS网定轨的残差水平相当。 为进一步分析伪距相位残差,表2给出了各测站所有14颗卫星在3天定轨弧段内伪距、相位无电离层组合的残差RMS统计表。 图1 多星定轨残差统计结果 表2 卫星多星定轨残差统计表(单位:m) 卫星类型卫星号伪距残差RMS残差均值卫星号相位残差RMS残差均值GEOGEO-10.2920GEO-20.2340GEO-30.3555GEO-40.3239GEO-50.32570.3062GEO-10.0088GEO-20.0077GEO-30.0083GEO-40.0082GEO-50.00950.0085IGSOIGSO-10.3118IGSO-20.2779IGSO-30.3216IGSO-40.2885IGSO-50.27330.2946IGSO-10.0096IGSO-20.0097IGSO-30.0110IGSO-40.0104IGSO-50.00910.0099MEOMEO-30.3960MEO-40.4664MEO-50.3907MEO-60.50690.4400MEO-30.0101MEO-40.0095MEO-50.0095MEO-60.00990.0098 图2 1021站GOE-4、IGSO-1、MEO-3残差图 从表2可以看出,所有三类卫星的相位残差基本处于一个量级,高轨卫星(GEO/IGSO)的伪距残差也大体相近,而MEO的伪距残差稍大,其主要原因在于,MEO观测弧段较短,卫星出入境前后数据质量较差。图2为1021站GEO-4、IGSO-1及MEO-3的残差图,从图中可以看出,由于区域网无法覆盖IGSO/MEO卫星的全部轨道,所以该站对IGSO-1与MEO-3卫星的可视弧段均存在空隙。按10°高度角截止,我国境内站每24h对IGSO约有4h的不可视弧段,对MEO卫星约有16h的不可视弧段。比较GEO与IGSO/MEO卫星的残差还可发现,在IGSO/MEO卫星的出入境弧段,伪距的测量噪声明显增大。 3.2 重叠弧段精度分析 重叠弧段精度评估标准反映了两次定轨的内符度;同时,通过多天重叠弧段的比较,能够反映定轨的稳定性。评估方法为3天弧段重叠两天,由重叠弧段在径向、切向、法向上的误差(ΔRi,ΔTi,ΔNi),计算得到位置误差: (5) 以及URE(User Range Error)值(式6适用于GEO/IGSO卫星,式7适用于MEO卫星): (6) (7) 统计得到各离散点处轨道之差的均方根误差: (8) 作为重叠弧段结果(其中Δσ可以代表R、T、N、Pos、URE中的任一变量含义)。 表3给出了将所有在轨卫星于2013年3月2日~8日共7天的定轨结果进行重叠弧段比较得到的R、T、N、Pos、URE精度。 表3 卫星多星定轨重叠弧段统计表(单位:m) 卫星类型卫星号RTNPosUREGEOGEO-10.2671.2081.5031.9460.366GEO-20.1930.7621.0501.3110.257GEO-30.2191.3201.5142.0200.341GEO-40.6062.5481.8613.2130.733GEO-50.2970.8681.0911.4250.348IGSOIGSO-10.2621.5050.4911.6050.334IGSO-20.4342.0370.6412.1790.516IGSO-30.4881.1001.3251.7900.537IGSO-40.2401.1970.7141.4150.301IGSO-50.3901.8430.5861.9730.464MEOMEO-30.2401.1650.6461.3540.297MEO-40.2421.2060.6771.4040.302MEO-50.2690.9790.7311.2510.313MEO-60.2511.1360.6261.4190.324均值—0.3141.3480.9611.7360.388 可以发现,多星定轨算法稳定,所有卫星径向重叠弧段精度(均值)优于0.4m,位置精度优于2m,URE精度优于0.4m。还可以看出,各卫星T、N方向的误差明显大于R方向误差,其原因在于,我们所采用的是中国境内站数据,所有跟踪站均偏于一侧所致。 3.3 卫星激光测距检验轨道视向精度分析 通过卫星激光测距手段,获得由地面站至卫星间的几何距离常被用作外符合手段对轨道视向精度进行评估。该测量方法通过测量地面发射与接收激光信号之间的时差进行距离测量,其测量手段决定了激光数据对卫星与接收机钟差不敏感。同时,由于激光测距的信号频率较高,传播路径上的介质时延量级比较小且可以较精确模制(厘米级),因此可以采用SLR进行轨道精度评估。具体步骤是:对激光测距观测值进行测站和卫星偏心改正、大气折射误差修正得到误差修正后的观测值O;利用多星定轨解算卫星轨道和激光站坐标可以计算给定时刻激光双程距离理论值C,将计算O-C得到激光数据的残差作为轨道的视向精度。 图3给出了2013年3月4日利用北京的激光数据评估多星定轨的轨道视向精度残差图,其中3幅子图分别表示GEO-1、IGSO-3、IGSO-5共3颗卫星的轨道视向精度残差图。由于广播星历的更新周期是1h,考虑到IGSO卫星每天存在约4h的出境弧长,故本文采用激光数据评估GEO卫星预报2h、IGSO卫星预报6h的轨道视向精度。 图3 SLR评估多星定轨不同卫星视向精度残差图 可以看出,GEO卫星预报2h、IGSO卫星预报6h的SLR轨道视向精度均优于0.4m,不同卫星的激光测距残差有所差别,各卫星定轨弧段及预报弧段的SLR评估结果RMS均值详见表4。 表4SLR评估的多星定轨视向精度(单位:m) 卫星精度GEO-1IGSO-3IGSO-5定轨精度0.2270.1990.159预报精度0.2750.2070.320 本文深入研究了COMPASS系统导航卫星多星轨道确定的特点与困难,详细给出了混合星座条件下导航卫星多星轨道确定的测量模型与动力学模型,设计了轨道与钟差参数的解算策略,并分别使用内符合评估法(定轨残差法、重迭弧段法)及外符合评估法(卫星激光测距检验轨道视向精度评估法)对多星定轨精度进行了分析与评估。试验及分析结果表明:区域网混合星座条件下,多星定轨伪距残差优于0.5m,相位残差优于1cm;重叠弧段精度在径向优于0.4m,位置精度优于2m;激光检验的轨道视向精度优于0.4m。 [1]北斗卫星导航系统官网.北斗卫星导航系统简介[EB/OL]. [2010-01-15].http://www.beidou.gov.cn/xtjs.html. [2]GuoRui,HuXiaogong,TangBo,etal.Preciseorbitdeterminationforthegeostationarysatellitewithmultipletrackingtechiques[J].Chin.Sci.Bull., 2010,55(6):428-434. [3]周善石.基于区域监测网的卫星导航系统精密定轨方法研究[D].上海:中国科学院上海天文台,2011. [4]DepartmentofDefense.GlobalPositioningSystemStandardPositioningServicePerformanceStandard[EB/OL].[ 2008-09-15].http://www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf. [5]周善石.区域卫星导航系统GEO/IGSO混合星座的精密定轨和时间同步[J].中国科学G辑: 物理学 力学 天文学,2011,54(6): 1089-1097. The Multi-satellite Precise Orbit Determination and It’s Accuracy for COMPASS Hybrid Constellation Hu Guangming, Guo Rui, Li Xiaojie, Wu Shan Beijing Satellite Navigation Center, Beijing 100094,China In order to realize and ensure COMPASS regional navigation system services, COMPASS system adopts a hybrid constellation composed of GEO, IGSO and MEO, completes orbit determination and prediction by a regional tracking network and ensure navigation services through forecasting ephemeris. It is difficult for the regional tracking stations to make whole-arc tracking for IGSO/MEO. Meanwhile, for the hybrid constellation condition different type of satellites have differences in dynamic characteristics. Especially GEO satellites are first adopted for navigation purpose, whose stationary characteristics leads to the orbit and clock strongly correlated, which brings certain difficulty for selecting dynamic model parameters. This paper proposes a measurement model and a dynamic model for orbit determination in regional tracking network, designs a multi-satellite precise orbit determination (MPOD) for solving orbit and clock parameters simultaneously and analyzes the radial accuracy of hybrid constellation in regional stations. The experiments show that the 3-dimensional position accuracy is better than 2m, the radial accuracy of 2-hour orbital prediction for GEO satellites based on laser data validations is better than 0.3m and the accuracy of 6-hour orbital prediction is better than 0.4m. COMPASS system; multi-satellite precise orbit determination(POD); satellite laser ranging (SLR) data;geostationary earth orbit (GEO);inclined geostationary orbit (IGSO);medium earth orbit (MEO) 2015-03-16。 国家自然科学基金资助项目(41204022), 上海市空间导航与定位技术重点实验室基金资助项目(12DZ2273300)。 胡光明(1974—),男,工程师,主要从事卫星导航数据处理和精密定轨方面的研究。 P228 A3 多星定轨试验及精度分析





4 小 结
