导引头跟踪回路的电注入测试法
2015-04-20胡伟锋赵桂军
吴 晔, 胡伟锋, 赵桂军
(上海无线电设备研究所,上海200090)
0 引言
在导引头测试中,应用目标模拟器或转台产生相对运动,可测量导引头的去耦系数、交叉耦合和等效时常数。
本文提出采用电注入测试法替代传统的采用目标模拟器和转台的测试方法,降低对设备和场地的需求,适应测试设备集成化、小型化、智能化和通用化的发展趋势[1-3]。
1 电注入法
所谓电注入法,通常是指采用电信号模拟大型设备中物理模型的实际信号,然后加载到被测装置或试验系统中,在注入信号的激励下获得相应的输出信号。通过对输入和输出信号分析,完成相关测试和试验。
例如,电注入法可以用于导引头去耦系数的测试。导引头伺服系统的稳定回路使弹载天线在惯性空间具有稳定指向,消除弹体扰动的影响。测试导引头伺服系统或导引头整机的去耦系数时,传统方法是用转台直接模拟弹体扰动进行测试。这种测试方法不仅需要转台测控系统,还要针对不同导引头加工相应的测试工装,比较复杂。采用电注入法进行测试时,只要在稳定回路的相应测试点注入正弦信号,模拟弹体扰动,就可以完成测试。
2 电注入法在导引头测试中的应用
在导引头试验项目中,去耦系数、交叉耦合和等效时常数测试都可采用电注入法实施。下面详细介绍利用电注入法测试这三种指标的原理和方法。
(1)去耦系数
天线对于弹体扰动的去耦系数,定义为弹体扰动角速度引起导引头跟踪回路输出信号折算的视线角速度与输入弹体扰动角速度之比的百分数。当扰动为正弦形式时,可描述为

式中:q为惯性空间的导引头视线角;ϑ 为惯性空间的弹体转动角;˙q、˙ϑ 分别为视线与弹体的转动角速度。
导引头中,通常采用陀螺作为敏感元件构建稳定回路,抑制弹体扰动对跟踪回路输出的影响,图1为导引头跟踪回路的等效模型。

图1 导引头跟踪回路的等效模型
图1中:W1(s)为接收机的传递函数;W2(s)为稳定回路校正环节的传递函数;W3(s)为驱动机构的传递函数;W4(s)为速率陀螺的传递函数;Q(s)为惯性空间视线角q(t)的象函数;Θ(s)为惯性空间天线转角θ(t)的象函数;Ωϑ(s)为弹体扰动角速度ωϑ(t)的象函数;Uq·(s)为导引头输出的代表视线角速度的雷达误差电压uq·(t)的象函数。
根据去耦系数定义,可得复频域表达式为

由式(2)看出,去耦系数只与稳定回路的开环频率特性有关,与跟踪回路的W1(s)无关。去耦系数是稳定回路的主要性能指标,可在天线伺服系统中考核。去耦系数数值越小,天线平台对弹体运动的隔离能力越强。
在去耦系数的转台测试法中,由转台模拟弹体运动引起的扰动信号,由陀螺输出测试结果,相应的稳定回路去耦测试系统的等效模型如图2所示。

图2 去耦系数电注入测试系统的等效模型
先将稳定回路断开,测试陀螺的时域输出信号的幅度Ug1。再将稳定回路闭环,测试陀螺的时域输出信号的幅度Ug2。Ug2除以Ug1,可得去耦系数为

在电注入测试法中,将扰动信号输入端和测试信号输出端连接至稳定回路控制器中,通过相加器将外部注入信号引入电注入端,并在测试输出端串联滤波器进行滤波,减小测试误差。在稳定回路断开和闭合两种状态下,分别测得测试端的时域信号幅度为Uo1和Uo2,Uo2除以Uo1,得到去耦系数测试值。
(2)交叉耦合
所谓通道交叉耦合,通常指导引头偏航和俯仰两个正交通道之间的信号互扰现象。产生交叉耦合的主要原因是两通道间的速率陀螺敏感轴安装位置不垂直、解调基准电压不正交、单脉冲天线馈源和比较器结构不对称、天线电轴校准误差以及接收机通道间的寄生耦合等。当目标沿导引头的一个通道的对应平面运动时,只希望该通道输出信号,另一个正交通道输出信号越小越好。在输入视线角速度或视线角为正弦形式时,偏航相对俯仰,以及俯仰相对偏航的交叉耦合系数分别为

根据定义,应使目标模拟器在导引头的一个通道对应平面内运动。例如,只在偏航通道有视线角速度信号,而俯仰通道的视线角速度为零。分别测量偏航雷达误差电压Uq·Y和俯仰雷达误差电压Uq·P,可得到俯仰交叉耦合系数CP。同样在俯仰通道引入信号,可以得到偏航交叉耦合系数CY。一般情况下,使用机械传动的目标模拟器容易造成视线角速度信号的失真,从而引入较大测试误差。根据相对运动原理,可以采用目标模拟器不动,导引头安装在转台上作正弦摆动来实现。
由此可知,测试交叉耦合的关键是产生正交的正弦视线角信号。而天线伺服系统的俯仰通道与偏航通道具有较高的正交性,可以用来测试交叉耦合。在W1(s)输出端增加相加器,引入电注入信号端,图3为交叉耦合电注入法的等效模型。
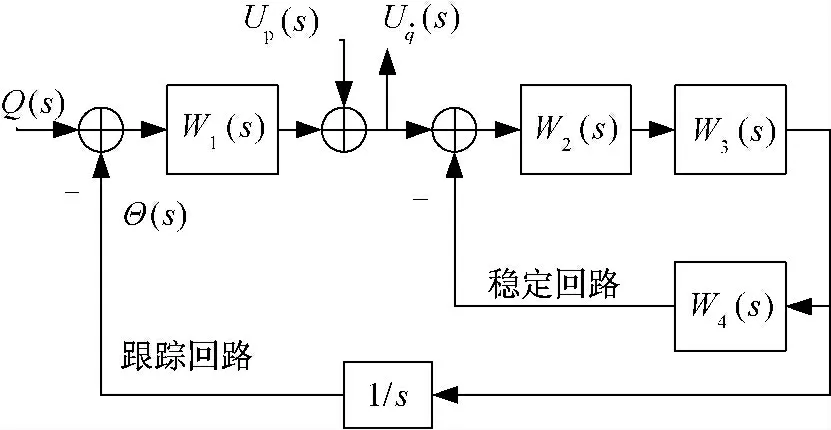
图3 交叉耦合电注入测试法的等效模型
当目标模拟器与导引头在同一轴线上,且静止不动时,系统的输入信号为0。在测试输入端注入信号,强迫天线在单通道正弦摆动,引起等效的视线角速度正弦变化,然后分别测量输出端的偏航与俯仰雷达误差信号,通过式(4)与式(5)的计算即可得到正交通道中的交叉耦合指标。
(3)等效时常数
由图1和式(2)可得导引头输出信号为

一般情况下,导引头接收机和稳定回路的快速性远比跟踪回路快,因此在研究跟踪回路性能时,可简化接收机和稳定回路模型。
接收机模型简化为

式中:kr为接收机传递系数。稳定回路模型简化为

式中:kg为陀螺传递系数。
于是式(6)可简化为

式中:T=kg/kr,为导引头等效时常数。由式(9)看出,导引头的动态特性为一阶低通滤波特性,其关键参数为导引头等效时常数T。导引头动态特性的测试方法较多,例如一阶系统时常数测试法、回路带宽测试法、关键频率点的正弦信号幅度测试法等,较精确的测试方式是时常数测试法。
由图1可以导出无弹体扰动情况下,Θ(s)相对于Q(s)的传递函数可简化为

可以利用式(10)来测试导引头等效时常数T,其中Q(s)由目标模拟器产生信号的象函数,Θ(s)是位标器框架角信号的象函数。导引头通过预定回路先将天线转到零位,在导引头波束角内将目模沿其中一个通道平面从零位偏开一个角度,再将导引头转入跟踪状态,由位标器框架角的记录曲线读取由零到稳定值63.2%幅值处的时间T 或零到稳定值95%幅值处的时间3T,得到导引头等效时常数T 测量值。
等效时常数测试法的等效模型同图3交叉耦合电注入测试法模型相同,在图3的电注入端Up注入阶跃信号,强迫天线运动替代目标模拟器的偏移,可构建导引头等效时常数测试的电注入法。当视线角为零时,由图3得到Θ(s)相对Up(s)的传递函数可简化为

在阶跃信号注入情况下,判读输出端阶跃响应的数据,可以获取导引头等效时常数指标。
3 电注入法测试误差分析与处理
不同的测试方法会引入不同的误差,对试验结果产生不同的影响,设计测试方法时必须注意测试精度。用电注入法测试导引头去耦系数、交叉耦合、等效时常数时,应采取措施抑制注入信号引入误差、信号精度和信号噪声等影响,使注入信号与测试要求良好匹配,降低测试误差。
在交叉耦合、等效时常数电注入测试中,由图3 得到电注入信号端与其等效视线角的函数关系为

按式(12)设置注入信号时,理论模型传递函数W1(s)与具体试件模型函数存在差异,造成不同试件的天线摆幅不同。电注入法测试交叉耦合和等效时常数时都按相对值测量,从而避免了测试误差。
电注入法测试去耦系数时,采用两次测量法可消除滤波器和注入信号误差的影响。按图2,稳定回路断开时,信号源产生正弦信号注入Ui端,在Uo端测得信号幅度为

第二次稳定回路闭环时,再次测量Uo端得到幅度为

由Uo2除以Uo1,与式(2)一致,获得准确的去耦系数测试值。
应用电注入法还要注意测试信号噪声的影响。电注入法的原理是基于线性系统的,而实际产品中存在非线性因素、电子电路热噪声和机构机械噪声等均会对测试产生影响,需采取相关处理来提高测试精度。在去耦系数交叉耦合测试时,可以采用滤波器对输出信号进行滤波。在导引头等效时常数测试时,可用框架角信号替代雷达误差信号进行测试,减少噪声对测试结果的影响。
4 结束语
在导引头去耦系数、交叉耦合、等效时常数等项目测试时,采用电注入法可以替代目模或转台的运动,可实现快速、高效、高可靠的自动化测试。已应用于导引头工程研制。
[1] 韩庆田,卢洪义,杨兴根.军用装备测试性技术发展趋势分析[J].仪器仪表学报,2006,27(6).
[2] 肖波,魏现杰,蔚海龙,等.论新型武器测试技术的发展趋势[J].科技创新导报,2008,34:13.
[3] 穆虹.防空导弹雷达导引头设计[M].北京:宇航出版社,1996.
