三维激光扫描技术在地表沉陷监测中的应用*
2015-04-19福州市勘测院福清分院福建福州350000山东科技大学测绘学院山东青岛6650
曾 凯,姜 岩(.福州市勘测院福清分院,福建福州 350000; .山东科技大学测绘学院,山东青岛 6650)
三维激光扫描技术在地表沉陷监测中的应用*
曾凯1,姜岩2
(1.福州市勘测院福清分院,福建福州350000; 2.山东科技大学测绘学院,山东青岛266510)
摘要:首先阐述了三维激光扫描系统的数据采集流程,然后介绍了点云去噪、配准、拼接等数据预处理的方法,并将三维激光扫描技术与RTK技术相结合应用于地表开采沉陷监测中。实践表明,利用三维激光扫描技术可以满足矿区地表开采沉陷监测的需要。
关键词:三维激光扫描技术;点云数据;地表沉陷监测; RTK
0 引言
煤炭在国内占着主体能源的地位,煤炭资源在国家经济命脉和能源安全保障方面起着重要基石的作用。而煤炭开采引起的覆岩破坏以及地表沉陷导致煤矿生产安全和生态环境系统等问题却一直存在且非常严重,刻不容缓需要解决[1]。因此,全面做好煤炭开采地表沉陷监测、预测、变形控制、矿区生态环境保护及恢复,实现煤炭生产与生态建设共同和谐、可持续发展的奋斗目标。将三维激光扫描技术应用于矿区开采沉陷研究中,以面状或带状点云数据代替传统的线状主断面观测点数据,从而获得更加真实和完整的地表移动以及裂缝等信息;地表沉陷短期观测站不需要埋设固定监测点,从而大大地缩短了观测周期,提高了监测工作效果和效率。因此,将其应用到矿区地表移动监测领域,探索其在该领域的应用方法及理论,将具有极其现实的意义[2]。
1 三维激光扫描数据获取及处理流程
本研究所采用的系统为美国Trimble公司生产的GX系列激光扫描测量系统。该系统主要包括扫描仪、笔记本、电源供应系统、专用配套标靶和配套控制软件以及处理软件,其中三维激光扫描仪配套的软件包括外业采集数据软件Point Scape 4.0和内业数据处理软件Real Works Survey 6.5。
三维激光扫描仪获得的点云数据的精度除了跟扫描仪本身构造和性能有关外,测站点的选择、控制点的选择以及扫描环境等因素都对其有重要的影响。并且如何科学地对点云数据进行预处理,也是影响扫描精度的重要因素。
1.1数据获取
三维激光扫描系统数据采集流程,如图1所示。分别在测站点与后视点架设扫描仪和标靶,在Point Scape 4.0软件中设置扫描过程中的参数,包括分辨率、扫描范围的距离等,本研究设置的扫描分辨率为200* 200 mm,同时绘制现场草图,对需要建模的实体进行拍照。当一个测站的点云数据扫描完毕后,紧接着将扫描仪架设到下一个观测站点继续上述步骤,此过程与全站仪数据采集相类似,直至将整个沉陷盆地扫描完毕为止。
1.2数据预处理
点云数据处理对三维建模及数据分析起着重要的作用。点云数据的处理步骤包括点云去噪、点云配准、点云拼接3个方面。1.2.1点云去噪
在扫描过程中,由于测量仪器精度、作业人员经验、被测目标表面质量、外界环境等多种因素的影响,极易产生一些测量误差点(称为噪声点),这些噪声点在三维建模的过程中会产生误差影响,因此需要将这些扫描误差点进行剔除。本研究所产生的噪声点主要来自于移动的车辆、行人及建筑物周围的高大树木等异常点和散乱点,噪声比较明显,可以通过肉眼判断,将点云数据进行分割,采取人机交互直接删除的方式进行剔除。本文数据处理是在Real Works Survey6.5软件上进行手动处理[3]。去噪处理前后效果,见图2。
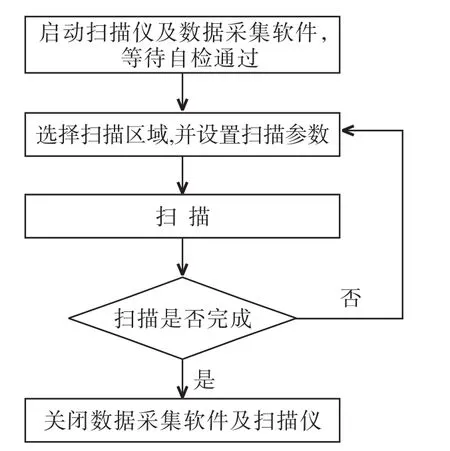
图1 三维激光扫描系统数据采集流程图Fig.1 Data collection process of 3D laser scanning system
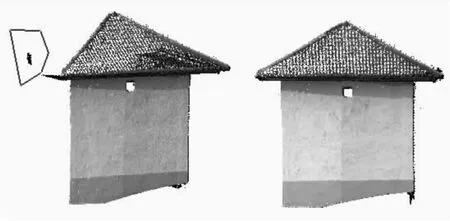
图2 去噪处理前后对比Fig.2 A comparison before and after removing noise of point clouds
1.2.2点云配准
对于Trimble GX三维激光扫描系统,每个观测站获得的点云数据都是以扫描仪中心为坐标原点的局部坐标系。因此需要将扫描采集得到的所有测站点云数据的局部坐标系坐标统一转换成大地坐标系坐标,这样才能为实际工程测量提供所需的数据。
以3个平面靶标的几何中心作为参考点,测量得到该3个参考点在扫描局部坐标系和大地坐标系下的三维坐标,分别是(XS,YS,ZS)和(XT,YT,ZT),扫描点云局部坐标系转换为大地坐标系统公式为:

式中:K为比例因子; RX、RY和RZ分别是X、Y和Z轴的旋转参数;ΔX、ΔY和ΔZ分别是X、Y和Z轴方向的平移量[4]。
1.2.3点云拼接
由于视野角度限制、被测实体形状复杂及面积过大等原因,扫描一站所采集到的点云数据一般不能体现整个被测目标实体真实三维形态空间信息。因此,根据扫描现场实际情况,应从不同角度和不同位置对被测目标进行多次、全方位的扫描,最终将采集到的所有点云数据进行拼接,并转换到统一的坐标系统中,这个过程称为点云数据拼接。
2 应用实例
以山东省某矿区3301工作面为例,在其开采影响区域内架设Trimble GX 3D三维激光扫描仪对地表移动观测站进行分析。将三维激光扫描技术与RTK技术相结合对工作面进行了两次扫描,通过对采集获得的点云数据进行点云去噪、点云配准、点云拼接等处理后,最终得到整个矿区开采沉陷盆地点云数据(见图3)[5]。Trimble GX 3D扫描仪可以竖直60°旋转以及水平360°旋转,其数据采集速度为5 000点/s,单点定位精度为6 mm/50 m、12 mm/100 m,测距精度为4 mm/50 m、7 mm/100 m。与传统测量方法相比,三维激光扫描测量方法可以快速、全面、高精度地监测地表开采前后移动变形,所获得的点云数据能整体、细致地、直观地分析地表的移动变形。图4为地表两期三维激光点云数据,从图中可以看出地表沉降情况,并且可以通过点取获得任意一点的沉降信息。
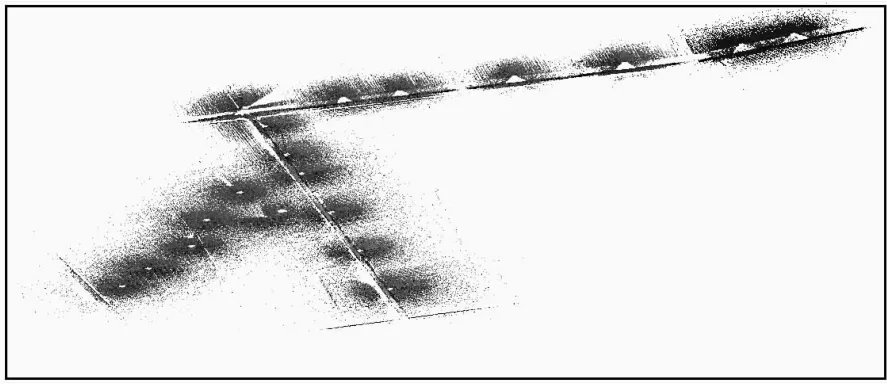
图3 预处理后点云数据Fig.3 Preprocessed point clouds
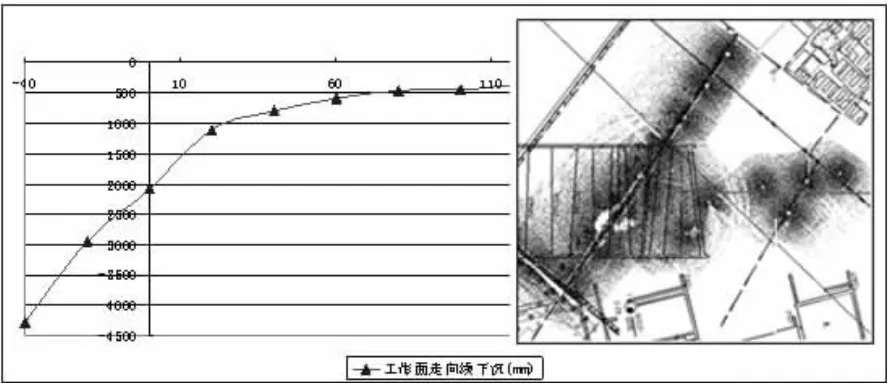
图4 量取两期点云高差ig.4 Measurement of point clouds' height difference in two stages
将两期点云数据经预处理生成DEM模型后导入同一工程中,然后点击Real Works Survey 6.5软件中“twin-surface-inspection-tool”工具,对两次扫描所得地表模型进行分析,从而得到沉陷地表的下沉差值,如图5所示。通过图上灰度条,地表沉降区域的沉陷情况一目了然,并可对该区域任意点的下沉值或任意线的下沉情况作进一步分析。沉陷地表任意点下沉差值分析,如图6所示。
利用Real Works Survey 6.5软件可将三维激光扫描点云数据直接生成等高线,也可先将点云数据生成mesh三维模型,再根据mesh三维模型生成等高线。生成的等值线,如图7所示。
三维激光扫描数据的特点是数据量大并且还是离散型点云,这导致不同时期的点云数据之间的离散点不能够完全匹配相同。为了得到不同时期点云同名点沉降等值线,即不同时期的地表变形情况,先将经过后处理的点云数据进行简化,然后将两期点云数据以*.asc格式导出,获得内容格式为X坐标,Y坐标,Z坐标的文本,对导出的数据经算法处理然后利用Surfer软件生成实测下沉等值线。正是因为不同时期点云的点名不一样,所以首先利用MATLAB软件通过粒子群优化神经网络拟合预测方法进行曲面重建[6],获得两期同名点沉降高差,并且点云数据量过大,为了减少神经网络拟合时间,可以对点云进行重采样抽稀数据,分若干部分进行曲面重建,然后通过Surfer软件进行处理获得矿区开采沉陷下沉盆地模型,如图8所示。经过数据处理得到两次不同时期扫描间地表的下沉值,根据开采沉陷中的概率积分的动态预计模型进行动态求参,获得的沉陷参数,如表1所示。
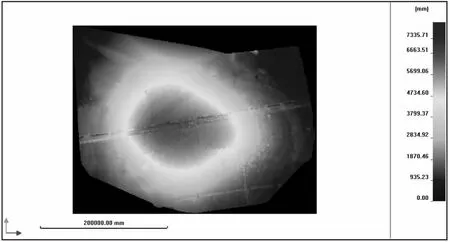
图5 地表沉陷下沉示意图Fig.5 Surface subsidence schematic
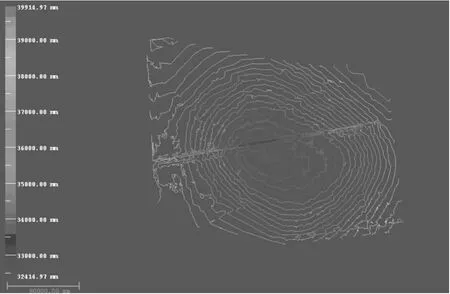
图7 部分点云生成的等值线Fig.7 Contour generated by using parts of point clouds
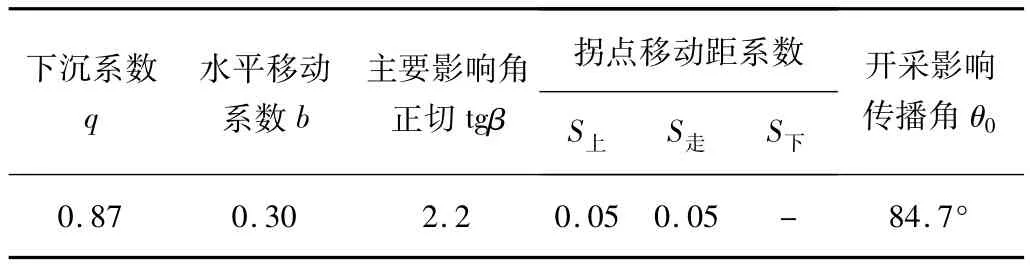
表1 概率积分法拟合参数Tab.1 Parameters of probability integral method
所求得的参数与该矿区类似地质条件以往的稳态观测站求得的结果基本一致,说明三维激光扫描仪应用在矿区地表沉陷获取的沉陷参数能够满足矿区动态预计计算的要求,能够指导矿区生产。
3 结束语
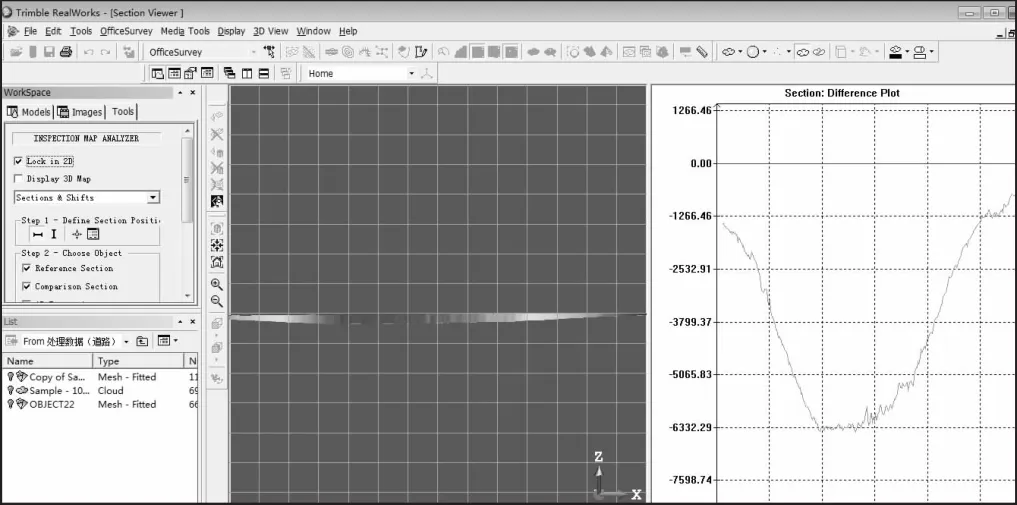
图6 两期道路点云数据检测效果图Fig.6 Data detection drawing of two phase of point clouds about road

图8 地表下沉三维盆地Fig.8 3D surface subsidence basin
三维激光扫描技术具有高精度、高效率、非接触性、快速性等优点,在矿区地表沉陷监测中与其他传统测量技术相比有无可替代的优势。传统测量技术采集的数据量有限,并且工作效率也相对较低,而三维激光扫描技术能够直观反应地表沉陷盆地的真实形态、完整的地表移动以及裂缝等信息。本文将三维激光扫描技术与RTK技术相结合应用于地表移动沉陷观测中,替代传统观测方法,该方法不用埋设占用农田的测点,降低了对耕种的影响,解决了设站用地和测点保护难等问题,使地表移动观测工作成为可能。通过对三维激光扫描测量与常规测量结果对比分析,最终证实三维激光扫描技术可以满足矿区地表开采沉陷监测的需求,为研究地表移动规律和解决建筑物下开采技术难题提供了参考,且研究成果具有一定的应用推广价值。
[参考文献]
[1]吴侃,汪云甲,王岁权,等.矿山开采沉陷监测及预测新技术[M].北京.中国环境科学出版社,2012.
[2]张舒,吴侃,王响雷,等.三维激光扫描技术在沉陷监测中应用问题探讨[J].煤炭科学技术,2008,36(11):92-95.
[3]胡大贺,吴侃,陈冉丽.三维激光扫描用于开采沉陷监测研究[J].煤矿开采,2013,18(1):20-22,35.
[4]陈永剑.地面三维激光扫描系统在露天矿监测的应用研究[D].太原:太原理工大学,2009.
[5]周大伟,吴侃,周鸣,等.地面三维激光扫描与RTK相结合建立开采沉陷观测站[J].测绘科学,2011,36(3):79-81.
[6]曾凯,姜岩,吴玮.神经网络在GPS高程拟合中的应用[J].黑龙江工程学院学报:自然科学版,2013(3):12-16.
Application of 3D Laser Scanning Technology in Surface Subsidence Monitoring
ZENG Kai1,JIANG Yan2
(1.Fuqing Branch of Fuzhou Investigation and Surveying Institute,Fuzhou Fujian 350000,China; 2.College of Surveying and Mapping,Shandong University of Science and Technology,Qingdao Shandong 266510,China)
Abstract:This paper firstly expounds the data collection process of 3D laser scanning system,and introduces the data preprocessing methods of point cloud denoising,splicing,and registering etc.3D laser scanning technology combined with RTK technology is applied to the surface subsidence monitoring.Practice shows that 3D laser scanning technology can meet the needs of the surface subsidence monitoring in mining area.
Key words:3D laser scanning technology; point clouds; surface subsidence monitoring; RTK
作者简介:曾凯(1989~),男,江西抚州人,硕士,助理工程师,现主要从事城市GPS测量、工程测量方面的工作。
*收稿日期:2015-03-23
文章编号:1007-9394(2015)02-0028-03
文献标识码:A
中图分类号:P 225.2; TD 325
