基于根轨迹的混合励磁超环面电机控制器设计
2015-04-19杨素君
刘 欣,聂 岭,杨素君
(天津工业大学机械工程学院,天津 300387)
基于根轨迹的混合励磁超环面电机控制器设计
刘 欣,聂 岭,杨素君
(天津工业大学机械工程学院,天津 300387)
提出了一种新型混合励磁超环面电机,在分析电机结构特点的基础上,建立了混合励磁超环面电机的数学模型;分析了该电机的阶跃响应特性,针对电机响应的快速性及稳定性问题,运用根轨迹法确定了控制器参数,提高了响应速度并且消除了稳态误差.仿真结果证明了该方法的可行性和有效性,对该种新型电机的实际应用具有指导意义.
混合励磁;超环面电机;控制器;根轨迹法
混合励磁电机最早是由美国学者提出的,它作为一种综合了永磁电机和电励磁电机优点的新型电机,一经出现便引起了国内外学者的广泛关注[1-6].与永磁电机相比,混合励磁电机利用励磁电流可调的优势实现了气隙磁场的灵活调节;与电励磁电机相比,混合励磁电机具有较小的电枢反应电抗,同时它还具有起动转矩大、调速范围广的优势.由于其励磁方式的特殊性,混合励磁电机结构的复杂程度增加,寻求简单合理的电机本体结构是一个很富有挑战性的研究课题.混合励磁超环面电机是在行星蜗杆集成传动[7]的基础上发展而来的新型混合励磁电机,它集成了行星蜗杆集成传动及永磁同步电机的特点,实现了动力装置与减速机构的结合[8],在获得较大减速比的同时使系统更加紧凑,在车辆、军事甚至航空航天等对空间利用率要求很高的领域具有广泛的应用前景.本文在超环面电机结构特点的基础上建立了数学模型,分析了该电机的阶跃响应特性并进行了控制器设计,有效地解决了响应慢和稳态误差的问题.在确定控制器的参数时选用根轨迹法,避免了传统试凑法的随意性和不确定性.
1 超环面电机结构
超环面电机结构示意图如图1所示,它主要由蜗杆内定子、行星轮、环面外定子和行星架转子构成.由于该电机在结构上具有蜗杆内定子的外环面和环面外定子的内环面,故称为超环面电机.蜗杆内定子铁心是由硅钢片叠压而成,铁心表面均匀分布有空间螺旋的电枢槽,槽内安放有电枢绕组,通入三相交流电时会产生空间螺旋状的旋转磁场.环面外定子由若干个NS极相间的空间螺旋永磁梁构成,为电机提供固定磁场.超环面电机的转子由行星架固连一定数目的行星轮组成,每个行星轮圆周上均布NS极相间的永磁齿,永磁齿在蜗杆内定子和环面外定子之间受到空间磁场力的作用,在电磁啮合点处受到的磁场力沿行星轮圆周切线方向上的分力会使行星轮产生自转,沿行星轮轴向方向上的分力使行星轮公转,行星轮的公转带动行星架转子转动,从而实现转矩的输出.
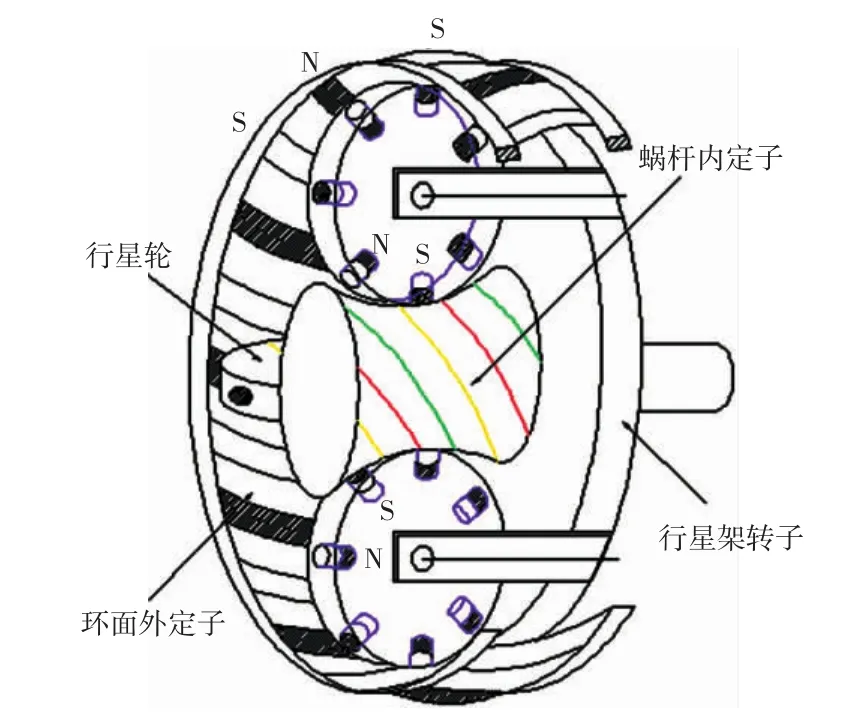
图1 超环面电机结构示意图Fig.1 Structure diagram of toroidal motor
2 数学模型
在建立超环面电机数学模型时,假设蜗杆内定子上的电枢绕组对称,且忽略元件的非线性因素.超环面电机的工作原理简图如图2所示.

图2 超环面电机工作原理简图Fig.2 Principle diagram of toroidal motor
由基尔霍夫电压定律[9]可以得到蜗杆内定子电枢绕组的电压方程为

式中:vs、Rs和is分别为单相电枢绕组的电压、电阻和电流;ψs为单相电枢绕组的磁链.超环面电机单相电枢绕组的磁链为

式中:Ls0为电枢绕组自感[10];ψf为行星轮永磁齿与蜗杆内定子电枢绕组的互感磁链;θe为行星轮自转的电角度.由传动关系可知θe与行星架公转的机械角度θ的关系为θe=Z0θ/2,其中Z0为超环面电机环面外定子的永磁梁个数.
由超环面电机的结构特点可知行星架转子输出的转矩是蜗杆内定子和环面外定子对行星轮的磁场力产生的转矩之和,对行星轮永磁齿进行受力分析可以得到

式中:Tm为电磁转矩;Br为环面外定子永磁梁的剩磁强度;K0和K1分别为与环面外定子和蜗杆内定子结构相关的转矩常数.由动力学理论得到超环面电机的运动方程为

式中:J和b分别为超环面电机转子的转动惯量和阻尼系数;TL为负载转矩.联立式(1)(2)(3)(4),可以得到超环面电机的传递函数为

式中:a1=3Ls0J/2;a2=3Ls0b/2+RsJ;a3=Rsb+cK1.由传递函数得到超环面电机系统图如图3所示,其中c=ψfZ0cos θe/2为反电动势系数.

图3 超环面电机系统图Fig.3 System diagram of toroidal motor
取单位阶跃信号为测试信号,考察零初值条件下超环面电机的响应特性,其阶跃响应如图4所示.

图4 超环面电机阶跃响应Fig.4 Step response of toroidal motor
由图4可见,超环面电机的响应速度慢且存在较大的稳态误差,有必要设计控制器来改善其性能.
3 基于根轨迹法的控制器设计
在常规电机的控制系统设计中,控制器的参数一般是在研究参数对电机性能指标影响的基础上采用试凑法来确定的,具有很大的随意性和不确定性.当电机性能指标以时域量的形式给出时,采用根轨迹法进行控制器设计是很有效的.基于根轨迹的控制器的基本设计思想是[11-13]:把系统的动态性能指标转化为靠近虚轴的一对希望的共轭主导闭环极点,再根据绘制根轨迹的相角条件判断该极点是否位于系统根轨迹上.如果这对主导闭环极点正好落在系统根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;如果该极点不在系统的根轨迹上,则需要设计控制器来改变系统原根轨迹的走向,使校正后系统的根轨迹经过这对希望的主导闭环极点.
超环面电机环面外定子永磁梁的剩磁强度在冲磁完成后基本保持不变,分析永磁梁剩磁强度作为输入对输出转速的影响可以为环面外定子永磁梁冲磁提供理论指导.设计控制器时主要考虑电压作为输入对输出转速的影响,设控制器的传递函数为Gc(s)= Kp+Ki/s,校正后系统图如图5所示.

图5 校正后系统图Fig.5 System diagram after ad justment
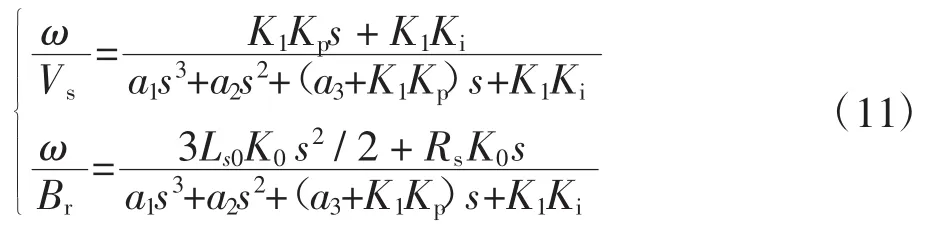
加入控制器后,超环面电机系统的单位闭环传递函数为

由闭环传递函数的特征方程1+GV(ss)Gc(s)=0可以得到幅角条件和幅值条件为

式中:n为自然数.闭环控制系统开环传递函数的零极点形式为



图6 系统零极点位置关系图Fig.6 Pole-zero position of system
根据幅角条件和幅值条件可以求得

从而可以求得控制器参数的解析解为

由控制器参数得到超环面电机校正后的传递函数为
4 仿真研究
在仿真过程中主要参数选取如下:K0=0.8、K1= 1.2,Ls0=0.1 H,Rs=20 Ω,a1=0.009,a2=1.2,a3=10.设期望的瞬态响应指标超调量为5%,调整时间为0.5 s.由阶跃信号来验证校正后控制系统的响应特性,如图7所示.
由图7可以看出,校正后闭环控制系统的超调量为8%,调整时间为0.48 s,与期望的响应指标有一定的误差.用根轨迹法进行控制器设计时,校正后系统的瞬态响应指标与期望的指标之间存在误差是不可避免的,这是因为在设计控制器时会引入新的极点.在超环面电机控制器设计过程中引入了一个新的极点s=-133.2,而通过期望的瞬态响应指标求得的共轭主导闭环极点为s=-6±j27.2,可以看出主导闭环极点与虚轴的距离远远小于新引入的极点且周围没有零点,这时主导闭环极点对系统的瞬态响应特性起决定性作用,引入的极点对闭环控制系统的瞬态响应特性不会造成很大的影响,由此产生的仿真误差也就在控制允许的范围之内.
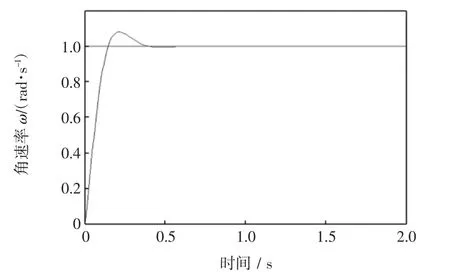
图7 控制系统的阶跃响应特性Fig.7 Step response characteristic of control system
加入控制器之后,环面外定子永磁梁的剩磁强度对阶跃信号的响应特性如图8所示,由响应图分析可知校正后环面外定子永磁梁的剩磁强度只对系统输出的瞬态响应有影响,而对系统输出的稳态响应没有影响.

图8 Br的阶跃响应特性Fig.8 Step response characteristic of Br
5 结束语
本文建立了体现超环面电机混合励磁特性的数学模型,并在此基础上设计了控制器,运用根轨迹法得到了控制器参数的解析解.从仿真结果看,系统响应特性在误差允许范围内与预期目标基本保持一致.研究结果证明了该方法的有效性,为该种新型电机控制系统的设计提供了理论指导.
[1]张卓然.新型混合励磁电机技术研究与进展 [J].南京航空航天大学学报,2014,46(1):24-26.
[2]朱孝勇,程明,赵文祥,等.混合励磁电机技术综述与发展展望[J].电工技术学报,2008,23(1):30-39.
[3]WANG Y,DENG Z.Hybrid excitation topologies and controlstrategies of stator permanent magnet machines for DC power system[J].IEEE Transactions on Industrial Electronics,2012,59(12):4601-4616.
[4]赵朝会,秦海鸿,严仰光.混合励磁同步电机发展现状及应用前景[J].电机与控制学报,2006,10(2):113-117.
[5]杨儒珊,康惠骏,冯勇.混合励磁永磁同步电机的结构原理与控制方案分析[J].微特电机,2006,34(6):10-12.
[6]杨成峰,林鹤云,刘细平.混合励磁同步电机调速系统的控制策略[J].电机与控制学报,2008,12(1):27-33.
[7]KUEHNLE M R.Toroidgetriebe:Urkunde uber die erteilung des deutschen patents:DE,1301682[P].1965-02-11.
[8]周守勇,刘欣,隋修武,等.混合励磁超环面电机结构分析与设计[J].微特电机,2014,42(7):8-14.
[9]XU L Z,FAN S H.Design and torque control of an electromechanical integrating toroidal drive[J].Mechanism and Machine Theory,2006,41(2):230-245.
[10]汤蕴璆,张奕黄,范瑜.交流电机动态分析[M].北京:机械工业出版社,2013:268-271.
[11]王俐.一种基于根轨迹串联超前校正的计算方法 [J].南昌大学学报:理科版,2007,31(6):610-612.
[12][美]Katsuhiko Ogata.现代控制工程[M].卢伯英,佟明安,译.北京:电子工业出版社,2011:205-245.
[13][美]DORF Richard C,BISHOP Robert H.现代控制系统[M].谢红卫,邹逢兴,译.北京:高等教育出版社,2010:281-324.
Controller design for toroidal motor with hybrid excitation based on root locus method
LIU Xin,NIE Ling,YANG Su-jun
(School of Mechanical Engineering,Tianjin Polytechnic University,Tianjin 300387,China)
A new kind of toroidal motor with hybrid excitation is presented.The mathematical model of the motor is built based on the structural characteristics.Step response characteristics of the motor are analyzed.Aiming at the problem of rapidity and stability for the response,the response speed is improved and steady-state errors are eliminated using the root locus method to determine the controller parameters.The simulation demonstrates the validity and effectiveness of the proposed method,it has a guiding meaning for the practical application of this new type motor.
hybrid excitation;toroidal motor;controller;root locus method
TM 359.9
A
1671-024X(2015)04-0072-04
10.3969/j.issn.1671-024x.2015.04.015
2015-04-07
国家自然科学基金资助项目(51207107)
刘 欣(1981—),女,讲师,博士,研究方向为超环面电机特性分析与控制研究.E-mail:liuxin@tjpu.edu.cn
