仿尺蠖式气压驱动管道清洁机器人的设计
2015-04-16,,
, ,
(东北电力大学 机械工程学院, 吉林 吉林 132012)
引言
管道运输在石油、天然气、化工等工业生产中发挥了巨大作用,降低了运输成本,极大的推动了工业生产的发展。在流体介质运输过程中,管道内部不可避免的存在破裂、泄漏、结块等现象,影响了管道运输功能的发挥;但是管道大都深埋于地下,要对管道实施检测和维修,存在很大的困难;在此背景下,能够进入管道内部作业的管道机器人引发了广大学者的研究热情。唐整生[1]研究了一种适用于10 cm以下的小型管道的作业机器人,该机器人采用无线方式驱动,完成对管道内无损探伤、管道内壁防腐喷涂、管道清淤、内壁视觉检查等功能。唐德威等[2]研制了一种具有差动运动功能的环境自适应轮式管道机器人,该机器人在通过弯管时可根据管道环境利用三轴差动机构自动调节各驱动轮的转速, 从而提高机器人通过弯管时的运动柔顺性。唐德威等研制的三轴差动机器人具有良好的性能,后续学者在此基础上继续展开了深入的研究。殷奇会等[3]对三轴差速式管道机器人在恶劣管道工作环境中的生存能力进行了研究,提出了一种提高且能计算出管道机器人越障能力的方法,取得了良好的效果。张学文等[4]研究了三轴差动式管道机器人驱动单元的弯管通过性, 建立了驱动单元在弯管处的运动方程与平衡方程, 分析了其在弯管处的差速特性与力学特性。孙丽霞等[5]对三轴差动机器人的驱动单元进行了设计。徐小云等[6]针对能够适应管径为 40~65 cm的管道, 提出了3 种适应不同管径的常用调节机构,并且分析了每种调节机构的力学特性, 给出了计算结果, 比较了各种调节机构的优缺点。胡文君等[7]则对管道机器人通过管道三通处的通过性进行了分析,提出了相应的控制策略。李鹏[8]、乔晋崴[9]则从机构设计学的角度提出不同的管道机器人机构,对于管道机器人的设计具有重要的参考意义。
本研究以管道清洁机器人为研究对象,参照自然界昆虫尺蠖的运动方式,运用仿生原理设计了仿尺蠖式气压驱动管道清洁机器人,在管道机器人设计原理上进行了较大的创新。
1 管道清洁机器人的设计
1.1 机械系统设计
尺蠖是自然界中较为常见的一种无脊椎动物,其运动形式较为特殊,它可以通过身体的前端和后端分别于树枝等固定,身体中间翘曲的方式向前运动,整个过程往复循环,其运动方式在仿生学上具有非常重要的意义。本研究所设计的管道清洁机器人仿照了自然界中尺蠖的运动方式,采用了前端和后端分别固定,中间收缩的方式实现了机器人在管道内壁的运动,其运动方式简单可靠,整个设计具有较大的创新性。
用于石油、工业废水等腐蚀性介质运输的管道内部的工况非常复杂,常伴有结块、凹凸等表面特征,造成机器人运动的阻力增大,拖缆作业时拖缆阻力增大,这要求机器人的驱动系统具有较大的驱动力,可以保证机器人能够较长距离的运动;同时清除管道内部结块也需要清洁作业单元具有较大的驱动力,保证清洁的效果。综合上述设计要求,本设计采用气压驱动作为管道机器人的动力源,采用大功率气压马达作为清洁作业单元的驱动源。气压驱动具有反映迅速、传输距离远、质量少、传输介质不需要回收等一系列优点,可以在远距离传输中很好的发挥作用。
仿尺蠖式气压驱动管道清洁机器人原理如图1所示。

1.清洁作业单元 2.气压马达 3.横向支撑滑轮14.横向支撑气压杆1 5.横向支撑气压缸1 6.纵向驱动单元17.纵向驱动气压杆 8.纵向驱动单元2 9.横向支撑气压缸210.横向支撑气压杆2 11.横向支撑滑轮2 12.管道图1 气压驱动管道清洁机器人
清洁作业单元采用高强度合金旋转刀头作为清除工具,采用气压马达驱动合金刀头旋转,能够有效的清除管道内壁的附着物。纵向驱动单元1和2采用直线驱动液气压缸作为动力源。两个纵向驱动单元之间通过虎克铰链连接,能够保证在管道弯曲部分通过虎克铰链的相对运动实现机器人在管道内的转弯运动。横向支撑单元1和2分别通过气压缸作用在管道内壁上,能够在机器人机械清洁作业和移动作业的时候为机器人提供横向支撑力;同时,由于横向支撑单元通过气压缸驱动,其运动行程可以在移动范围内任意调节,通过运动行程的调节可以适应不同内径的管道,拓展机器人的应用范围。
2 管道机器人仿尺蠖式工作原理分析
2.1 仿尺蠖式工作原理分析
通过对管道机器人作业过程的分析,本研究提出了管道机器人的仿尺蠖式工作方式,其工作原理可以分为以下5个环节:
(1) 前向支撑环节:在本环节中,横向支撑单元1气压缸进给,整个支撑单元1锁定管道内壁;横向支撑单元2气压缸回缩,横向支撑单元2的锁定滑轮脱离管道内壁,处于悬浮导向状态,该过程与尺蠖运动过程中的头部固定,尾部松开的状态一致。其作用形式如图2所示:
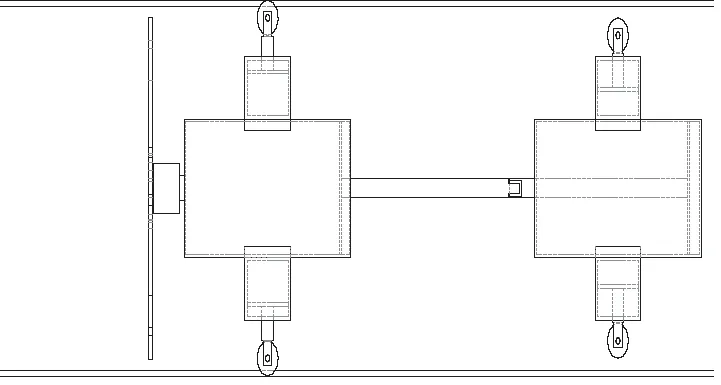
图2 前向支撑环节原理
(2) 纵向拉动进给:在本环节中,纵向驱动单元1气压缸右端工作,纵向驱动单元1的活塞杆通过虎克铰链拉动纵向驱动单元2向前进给,该过程与尺蠖运动过程中的头部固定,中间弯曲带动尾部前进的状态一致。其作用形式如图3所示:

图3 纵向拉动进给原理
(3) 后向支撑环节:在本环节中,横向支撑单元2气压缸进给,整个支撑单元2锁定管道内壁;横向支撑单元1气压缸回缩,横向支撑单元1的锁定滑轮脱离管道内壁,处于悬浮导向状态,该过程与尺蠖运动过程中的尾部固定,头部松开的状态一致。其作用形式如图4所示:

图4 后向支撑环节原理
(4) 纵向推动进给:在本环节中,纵向驱动单元1气压缸左端工作,纵向驱动单元1的活塞杆通过虎克铰链拉动纵向驱动单元2固连,纵向驱动单元1气压缸向前进给,该过程与尺蠖运动过程中的尾部固定,中间伸直带动头部向前运动的状态一致。其作用形式如图5所示:

图5 纵向推动进给原理
(5) 清洁作业环节:在本环节中,横向支撑单元1和2的气压缸全部进给,锁定管道内壁,气压马达驱动合金刀头旋转,进行轨道内部清洁作业。
当机器人完成整个管道的清洁作业后,仿照尺蠖运动进行运动方向的转换,纵向驱动单元2变成拖动单元,纵向驱动单元1变成推动单元,带动整个机器人退出管道,完成全部作业。
2.2 气压系统设计
在分析上述工作原理的基础上,本研究设计了仿尺蠖式气压驱动管道机器人的气系统,其原理图如图6所示。

图6 气压系统原理图
3 结论
1) 提出了仿尺蠖式管道内壁清洁机器人的运动方式,进行了管道清洁机器人设计原理上的创新;
2) 设计了管道内壁清洁的机器人的机械系统,完成了管道清洁机器人所有功能;
3) 设计了管道清洁机器人的气压系统。
参考文献:
[1]唐整生.多功能管道机器人的移动机构分析与设计[J].化学工程与装备,2013,(3):52-55.
[2]唐德威,李庆凯,姜生元,等.具有差动运动功能的管道机器人设计与分析[J].机械工程学报,2011,47(13):1-8.
[3]殷奇会,孔凡让.三轴差速式管道机器人越障能力分析[J].机电工程,2012,29(12):1371-1375.
[4]张学文,邓宗全,贾亚洲,等.三轴差动式管道机器人驱动单元弯管通过性研究[J].中国机械工程,2008,(23):2777-2781.
[5]孙丽霞,江旭东,姜生元,等.机械自适应型管道机器人驱动单元的设计[J].机械设计,2009,(10):37-40.
[6]徐小云,颜国正,丁国清,等.管道机器人适应不同管径的三种调节机构的比较[J].光学精密工程,2004,12(1):60-65.
[7]胡文君,李著信,苏毅,等.管道机器人在三通处的通过性分析[J].后勤工程学院学报,2005,(3):49-53.
[8]李鹏,马书根,李斌,等.具有自适应能力管道机器人的设计与运动分析[J].机械工程学报,2009,45(1):154-161.
[9]乔晋崴,尚建忠,陈循,等.基于凸轮自锁原理的伸缩式管道机器人设计[J].机械工程学报,2010,46(11):83-88.