双阈值法地面激光点云强度图像边缘提取
2015-04-16程效军
谭 凯,程效军
(同济大学 测绘与地理信息学院,上海200092)
地面三维激光扫描(terrestrial laser scanner,TLS)以其高分辨率、高精度、高效率、数字化采集、信息量丰富等优点,为变形监测、文物考古、三维城市建模等应用提供优质的数据源.地面三维激光扫描应用重要而基础的工作之一就是离散点云数据边缘提取[1].对地面三维激光扫描数据进行边缘提取,可以进行基于边缘的点云分割,将具有相似性质的点集合起来构成区域,实现目标的准确识别,更好地进行关键目标及目标特征的提取和分析.由于边缘检测的方法既可独立实现点云的完整分割,又可作为区域分割的预处理,所以边缘提取的准确性直接影响后续任务的有效性,对点云数据处理具有十分重要的意义.
现有的点云边缘提取方法大都是基于点云的几何信息,通过几何信息直接在三维空间求取点云的距离变化、法向变化、曲率变化、高程差异、密度大小、拓扑关系等,在此基础上实现点云的分割与边缘提取[2-3].地面激光扫描点云数据排列不规则、分布复杂,直接在三维空间进行操作较为复杂.因此另一种常用的方法是将距离数据作为灰度值,生成距离图像(深度图像),借助数字图像处理的方法对其进行处理[4-6].地面激光扫描技术获取的激光点云不仅具有完整的三维空间信息,而且包含丰富的激光反射强度信息[7].激光强度表征目标对激光的反射光谱特性,是目标对发射激光光束的后向散射回波的光功率,可看作目标特性的一个重要物理量.不同种类目标点对激光的反射特性不同,接收到的回波强度也不同,因此可借助强度图像实现点云的边缘提取[8-9].强度信息与三维坐标信息是同一系统同一时间获取的,与坐标信息是非常精确的一一对应,无需配准,它们具有像素级融合的条件[8].但是,受仪器噪声、环境噪声及目标特性等各种因素的影响,强度数据中包含有较大的噪声,如何有效地对强度图像进行去噪,是强度图像边缘提取精度的保证.
本文首先分析了利用强度图像进行点云边缘提取的可行性及强度图像中非边缘点、边缘点及噪声点的八邻域特征.根据各类点的八邻域特征,提出了一种双阈值判别准则,用于提取强度图像中的非边缘点、边缘点与噪声点.对非边缘点与噪声点进行中值滤波;对边缘点,其灰度值保持不变,既能有效去除点云强度图像中的椒盐噪声,同时也能保证边缘提取的精度.
1 强度图像边缘提取可行性分析

激光扫描仪发出的激光信号,经过大气传输到达目标,与目标表面发生作用,再返回到激光接收机,整个过程可用激光雷达测距方程定量表示.对于扩展的朗伯面,激光雷达测距方程可简化为[10]:式中:Pr为接收激光功率;Pt为发射激光功率;Dr为接收机孔径;R为扫描仪中心到扫描目标点距离;ηatm为单程大气传输系数;ηsys为光学系统传输系数;ρ为目标在激光波长下的反射率,θ为入射激光与目标表面法向量之间的夹角,称为激光入射角.
对于地面近距离激光扫描,式(1)中与扫描系统相关的发射功率Pt、接收机尺寸Dr、系统传输参数ηsys、大气衰减参数ηatm在同一次扫描任务中都可以看作是稳定不变的,将所有常量结合,令称作“扫描几何因子”.则:

对于不同的地面激光扫描系统,激光强度值I可能对应回波的峰值振幅、功率或者能量.不管采取哪种转换形式,可以肯定的是,强度值与接收功率之间存在函数关系I=F(Pr),即:

其中:F的具体形式未知;f的具体形式如式(2)所示;Φ具体形式也未知.
综合式(2)、(3)可得:对于某一特定的地面扫描仪,激光强度值受到目标反射率、激光测距值及激光入射角的影响.如图1a所示,A、B分别表示两类不同目标对应的区域,1~8表示两类目标中不同的小面积区域.图1b~1e表示相应区域的强度曲线,其中纵坐标I为激光强度,横坐标n表示点号,根据上述分析可得结论:
结论一:对于A、B内的某一小区域1~8,小区域内各点目标反射率相同,扫描几何因子接近,强度值接近,因此在强度图像中表现为非边缘点与其邻域点灰度差异较小.
结论二:对于同质区域的不同区域,目标反射率相同.当扫描几何因子相差较大时(如区域1和2),强度值相差较大;当扫描几何因子相差较小时(如区域7和8),强度值接近.对于异质区域的某一小区域(如区域3和6),目标反射率不同,扫描几何因子也不同,但二者组合之后使得接收功率相近,因此强度值相近.即在同质区域的不同部分,可能出现“同物同谱”(图1e)或者“同物异谱”(图1b)现象;在异质区域内,也可能出现“异物同谱”(图1c)或者“异物异谱”(图1d)现象.因此不能利用原始激光强度值进行点云分类,而需要对其进行辐射改正.
结论三:对于边缘小区域(如区域4和5),扫描几何因子接近,强度值只受到反射率的影响而差异较大,在强度图像中表现为边缘点与其邻域点灰度差异较大,因而直接利用原始强度图像对点云进行边缘提取是完全可行的.
2 双阈值法噪声去除与边缘提取
激光为单色光,通过接收的激光回波信号形成的强度图像,此类图像都存在比较严重的噪声,噪声中的主要成分为椒盐噪声[9].如果直接对原始强度图像进行边缘提取,往往无法去除噪声,也会因为噪声的存在而破坏某些重要边缘,影响边缘提取的精度.对于椒盐噪声,一般采用中值滤波的方法予以滤除,中值滤波的基本原理是把图像中每一点的值用其邻域中各像素灰度值的中值代替.设{x(i,j),(i,j)∈I2}为图像中各点的灰度值,{y(i,j),(i,j)∈I2}为中值滤波后图像中各点的灰度值,滤波窗口为w的二维中值滤波可定义为

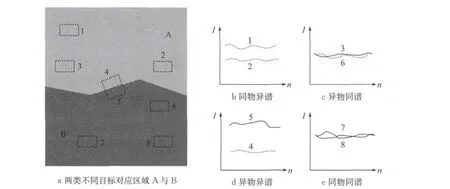
图1 同质区域A、B及其内部小区域强度曲线Fig.1 Homogeneous regions A and B and the intensity curves of their internal small areas
如果直接利用传统中值滤波对强度图像中的所有像素点进行滤波,在去除噪声的同时会使图像变得模糊,特别是在边缘与细节部分,某些边缘会因中值滤波遭到破坏.因此,本文通过分析强度图像中像素点八邻域强度变化,建立了一种双阈值判别准则,提取强度图像中的边缘点、非边缘点与噪声点.对非边缘点与噪声点,采取中值滤波,可以去除椒盐噪声,也能减少非边缘点之间的强度差异;对边缘点,保持原有灰度值不变,可以保护边缘不受破坏,具体算法如下.
对强度图像的某一点(i,j),其像素为I(i,j),取其相邻的8个像素点,令:

如图2所示,圆点与方点分别表示强度图像中两类不同目标I与II对应的像素点,三角点表示噪声点,虚线段表示边缘,p表示非边缘点,q表示边缘点,r、s表示噪声点,则:
(1)如果点(i,j)为非边缘点,如图2中点p所示,则其八邻域中的像素点都为同质点,根据第1节中结论一,同一目标小区域内强度值接近,在强度图像中表现为灰度值接近,则邻域点的灰度值与点p灰度值接近,则d(i,j)较小;
(2)如果点(i,j)为边缘点,如图2中点q所示,则其八邻域中至少存在一个异质点,根据第1节中结论三,边缘小区域内不同目标点强度值相差较大,则d(i,j)较大;
(3)如果点(i,j)为噪声点,如图2中点r所示,其八邻域都是异质点,根据第1节中结论三,则d(i,j)很大.
设定阈值δ1、δ2,且δ1<δ2,δ1用来区分非边缘点与边缘点,δ2用来区分边缘点与噪声点.若d(i,j)≤δ1,则点(i,j)为非边缘点;若δ<d(i,j)<δ2,则点(i,j)为边缘点;若d(i,j)≥δ2,则点(i,j)为噪声点.设I(i,j)为原始强度图像中点(i,j)的像素值,If(i,j)为滤波后点(i,j)处的像素值,则:
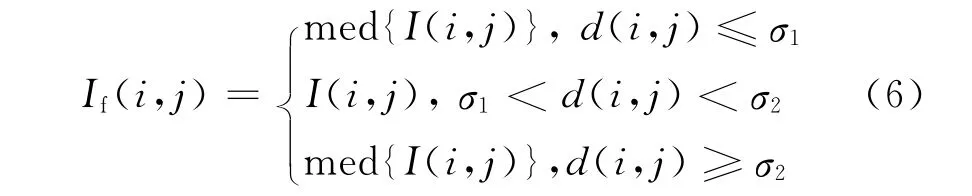
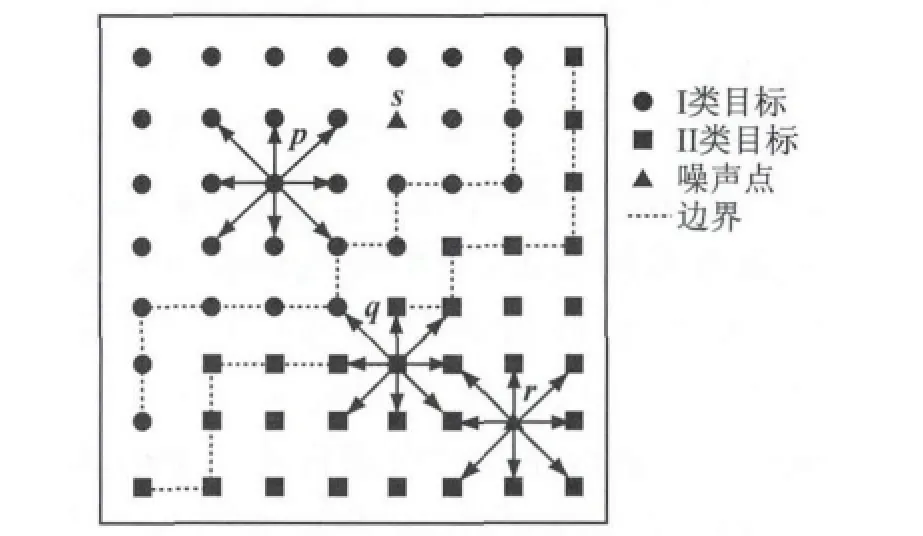
图2 强度图像中边缘点、非边缘点及噪声点的八邻域Fig.2 Eight neighborhood of edge points,non-edge points and noise points in the intensity image
这样既可以去除噪声,又能保护边缘,保证边缘提取的精度.滤波完成后本文借助Canny边缘检测算子对强度图像进行边缘检测.Canny算子是在3个指标(好的监测、好的定位和最小响应)和3个准则(信噪比准则、定位精度准则和单边缘响应准则)的基础上发展起来的,是一种很有效的边缘检测方法.为了对本文方法的精度做出评价,可以借助“弱边缘保护”这个指标来定性评价算法对目标边缘较弱的信息点的保护能力.弱边缘指图像中灰度变化较小,而实地是地物边缘的情况.此外,可以借助信噪比定量评价算法对噪声的抑制能力,这里认为原始强度为信息,处理后的图像与原始图像的差异就是噪声,其公式为

式中:SNR为信噪比;M、N分别为图像的长、宽.SNR越大,表明噪声去除能力越好.
在实际应用中,可选取某噪声较小的同质区域的部分强度图像(图像大小M×N),计算其中每个点的d(i,j)(去除首行、首列、末行、末列),取其平均值:

假若共选取了K组同质区域强度图像,则可取.δ2用于区分边缘点与噪声点,其取决于噪声点与其八邻域的灰度差,不同区域噪声点与其八邻域灰度差不同(如图2中点r和点s所示).在δ1取值合适的情况下,可根据最终去噪结果与边缘提取精度对δ2进行调节:如果某些噪声无法去除(SNR偏小),但是边缘无破坏,表明δ2取值偏大;如果噪声去除较好,但是某些边缘遭到破坏,表明δ2取值偏小.
3 实验验证分析
本文实验采用FARO Focus3D120地面三维扫描仪,表1列出了扫描仪的几项主要参数,其提供的扫描数据由每个点的三维坐标及强度值(x,y,z,I)组成,其强度量化等级为11bit,范围为[0,2 048],具有很高的强度分辨率,可以表达数据中极其微小的反射特征差异和强度噪声.利用Faro Focus3D120扫描仪对某一建筑物立面进行扫描,设置扫描分辨率为1/4,扫描质量为4倍,扫描范围为360°×305°,最后共计获得墙面点云5 288 193个.
本文选取噪声较小的部分同质区域强度图像根据式(8)计算得δ1=30,并根据“弱边缘保护能力”与SNR(30.25)两个指标得到δ2的最佳取值为250,选择中值滤波窗口尺寸为3×3.

表1 FARO Focus3D120主要参数Tab.1 Main parameters of FARO Focus3D120
如图3a所示为原始强度图像,其中存在部分椒盐噪声.图3b为直接利用Canny算子对原始强度图像进行边缘提取的结果(其中虚线框表示边缘缺失部分,下同).由图3b可知,可以直接对原始强度图像进行边缘提取,但是无法去除噪声,同时某些边缘会遭到破坏.对原始强度图像进行传统中值滤波后再进行边缘提取,结果如图3c所示.由图3c可知,传统中值滤波可以较好地去除噪声,但是会破坏某些边缘.利用本文方法进行滤波(δ1=30,δ2=250),再进行边缘提取,结果如图3d所示.分析图3d可知,本文方法不仅能去除点云强度图像中的椒盐噪声,同时能保证边缘提取的精度.
决定本文方法噪声去除与边缘提取精度的重要变量就是阈值δ1与δ2,δ1用于区分边缘点与非边缘点,δ2用于区分边缘点与噪声点,因此:
(1)如果δ1偏小,某些非边缘点被误当作边缘点而不进行滤波,因而某些椒盐噪声无法去除,进而影响到边缘提取的精度;当δ1为零时,所有点都被当作边缘点而不进行滤波,相当于直接对原始强度图像进行边缘提取;
(2)如果δ1偏大,就会把某些边缘点误当作非边缘点进行中值滤波,进而破坏某些边缘;δ1过大,所有点都被当作非边缘点,就相当于直接对原始强度图像进行中值滤波;
(3)如果δ2偏小,某些边缘点被误当作噪声点,进行中值滤波就会破坏边缘;
(4)如果δ2偏大,某些噪声点被当作边缘点而不进行中值滤波,某些噪声无法去除.
δ1、δ2任何一个偏大或偏小,都会影响最终边缘提取的精度,合适的δ1、δ2既能去除噪声,又能保证边缘提取的精度.根据上述分析,表2列出了δ1、δ2取值分别偏小、合适、偏大共9种组合的理论结果(图中↓表示取值偏小,↑表示取值偏大,下同).为了对表2中的理论结果进行验证,本文取不同的δ1、δ2对强度图像进行滤波,最终边缘提取结果如图4所示.分析图4可知,δ1、δ2取值分别偏小、合适、偏大共9种组合的边缘提取实验结果和表2理论分析结果完全吻合.
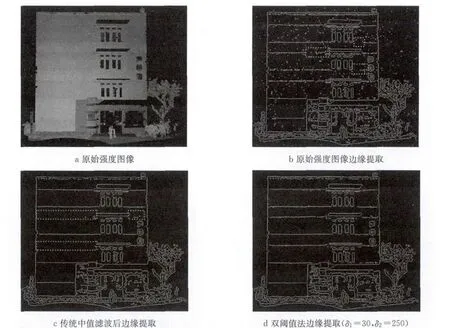
图3 原始强度图像、传统中值滤波及本文方法边缘提取结果Fig.3 Edge extraction results of the original intensity image,the traditional median filtering and the method proposed in this paper
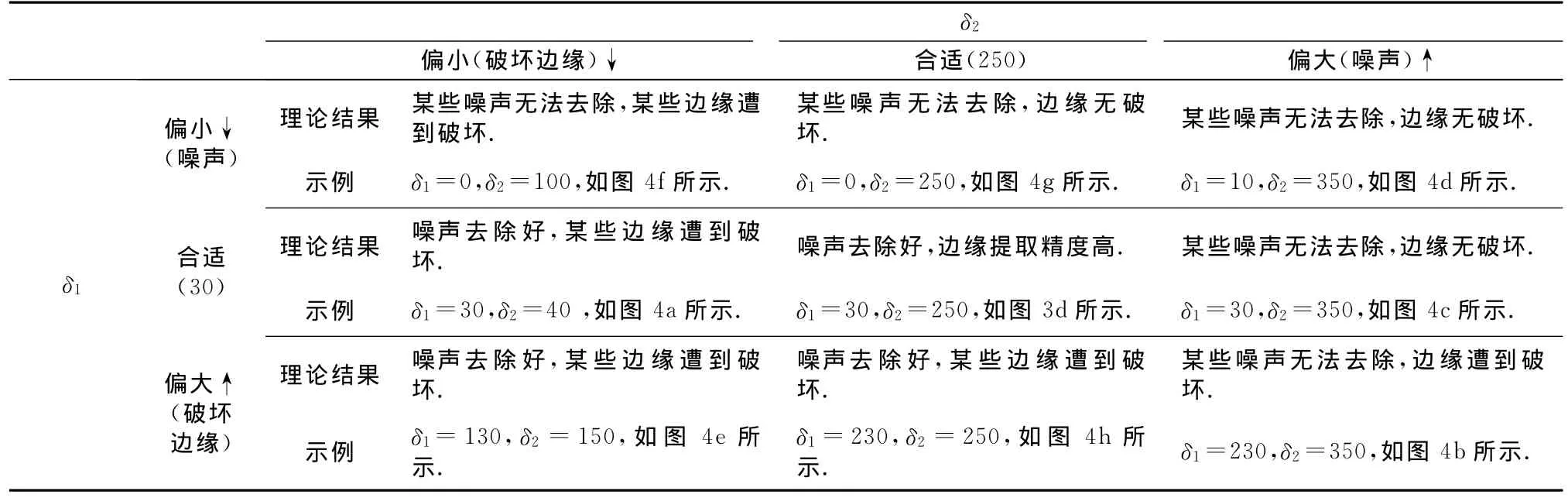
表2 δ1与δ2不同取值结果及示例Tab.2 Results and examples for different selections ofδ1andδ2
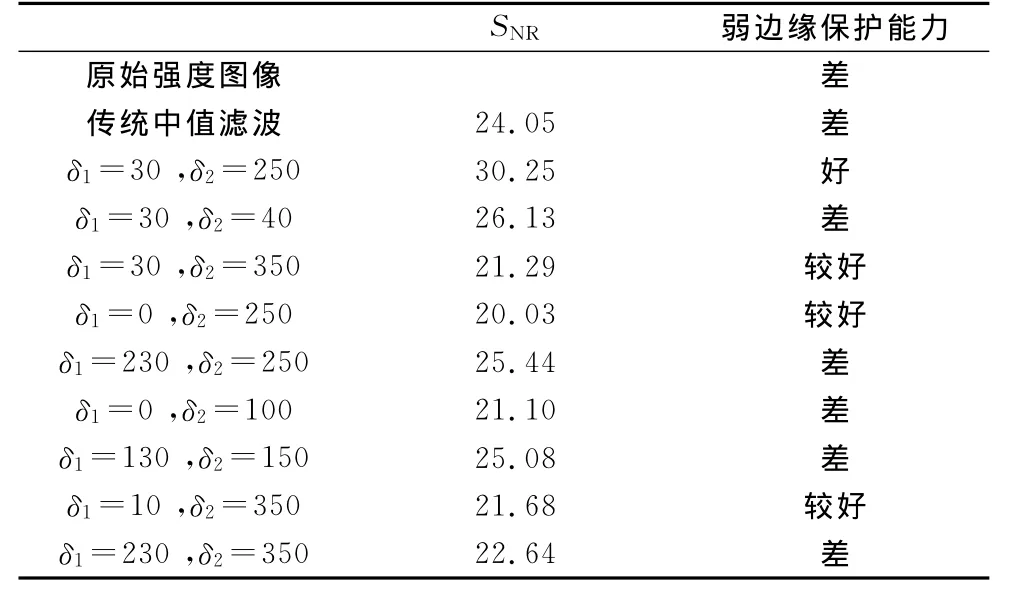
表3 SNR与“弱边缘保护能力”Tab.3 SNRand weak edge protection ability
原始强度图像边缘提取、传统中值滤波后进行边缘提取及不同δ1、δ2滤波后边缘提取的SNR与“弱边缘保护能力”见表3.分析表3可知,本文方法(δ1=30,δ2=250)SNR最大,表明本文方法去噪效果最好,同时,对边缘保护的能力最好.
4 结语
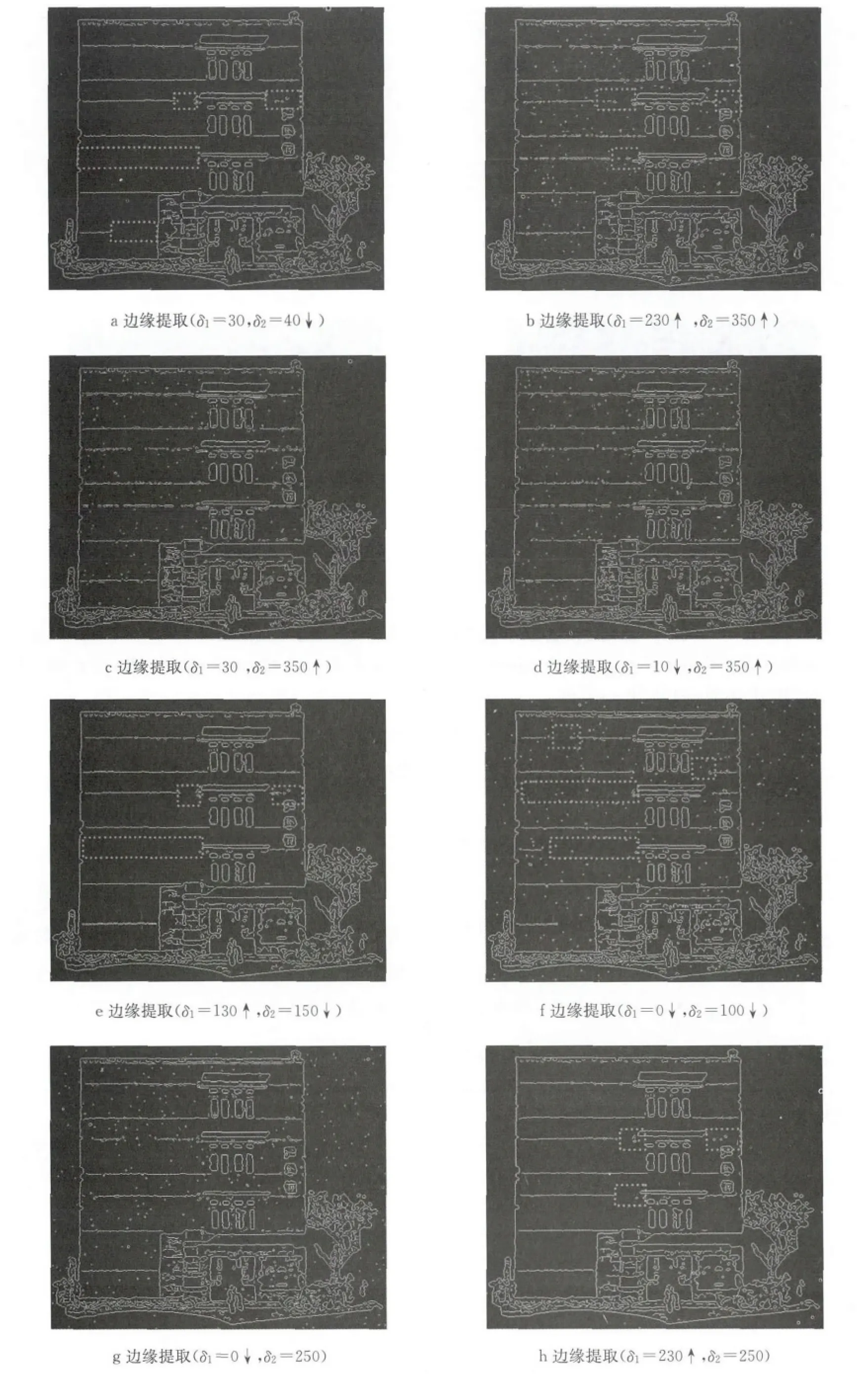
图4 边缘提取结果Fig.4 Edge extraction results
针对地面激光点云强度图像,本文提出了一种双阈值判别方法来提取非边缘点、边缘点与噪声点.对非边缘点与噪声点进行中值滤波,对边缘点,其灰度值保持不变.对滤波后强度图像利用Canny算子进行边缘提取,通过实验对不同阈值边缘提取结果进行了详细的讨论与对比,为阈值的选取提供了一些实质性的结论.实验结果表明:双阈值选取对边缘提取结果至关重要,合适的阈值可以对强度图像中的非边缘点、边缘点与噪声点进行有效区分,进行滤波后可以有效地去除噪声,同时较好地保护边缘.双阈值法强度图像边缘提取充分利用和挖掘了地面三维激光扫描的强度数据,为边缘提取提供了一种新的方法,也为后续的点云分割、分类及特征提取奠定了基础.本文方法能有效地检测强度图像中的异质区域边缘,但对于同质区域边缘(凸凹处、边角处)并不能实现有效的检测,下一步的研究方向是要结合距离图像实现同质区域边缘的检测.
[1] 王宗跃,马洪超,徐宏根,等.海量点云的边缘快速提取算法[J].计算机工程与应用,2010,46(36):213.WANG Zongyue,Ma Hongchao,XU Honggen,etal.Novel algorithm for fast extracting edges from massive point clouds[J].Computer Engineering and Applications,2010,46(36):213.
[2] 李宝顺,岑红燕,包亚萍,等.基于滚动圆的点云数据边缘检测算法[J].计算机工程与设计,2013,34(5):1836.LI Baoshun,CEN Hongyan,BAO Yaping,etal.Edge detection algorithm for point cloud based on rolling-circle[J].Computer Engineering and Design,2013,34(5):1836.
[3] Coleman S A,Scotney B W,Suganthan S.Edge detecting for range data using laplacian operators[J].Image Processing,IEEE Transactions on,2010,19(11):2814.
[4] 黄涛,胡以华,赵钢,等.基于激光成像雷达距离图像的目标提取与分类技术[J].红外与毫米波学报,2011,30(2):179.HUANG Tao, HU Yihua, ZHAO Gang,etal.Target extraction and classification based on imaging LADAR range image[J].Journal of Infrared and Millimeter Waves,2011,30(2):179.
[5] 史文中,李必军,李清泉.基于投影点密度的车载激光扫描距离图像分割方法[J].测绘学报,2005,34(2):95.SHI Wenzhong,LI Bijun, LI Qingquan.A method for segmentation of range image captured by vehicle-borne laser scanning based on the density of projected points[J].Acta GeodaeticaetCartographicaSinica,2005,34(2):95.
[6] 郭裕兰,鲁敏,谭志国,等.距离图像局部特征提取方法综述[J].模式识别与人工智能,2012,25(5):783.GUO Yulan,LU Min,TAN Zhiguo,etal.Summary of local feature extraction methods for distance images[J].Pattern Recognition and Artificial Intelligence,2012,25(5):783.
[7] 张毅,闫利.地面激光点云强度噪声的三维扩散滤波方法[J].测绘学报,2013,42(4):568.ZHANG Yi,YAN Li.3D diffusion filtering method of intensity noise for terrestrial laser scanning point cloud[J].Acta GeodaeticaetCartographicaSinica,2013,42(4):568.
[8] 赖旭东,万幼川.基于平坦度的激光雷达强度图像的滤波算法[J].中国激光,2005,32(10):1325.LAI Xudong,WAN Youchuan.A kind of filter algorithm for LiDAR intensity image based on evenness terrain[J].Chinese Journal of Lasers,2005,32(10):1325.
[9] 赖旭东,万幼川.一种针对激光雷达强度图像的滤波算法研究[J].武汉大学学报:信息科学版,2005,30(2):158.LAI Xudong,WAN Youchuan.A filter algorithm for LiDAR intensity image[J].Geomatics and Information Science of Wuhan University,2005,30(2):158.
[10] Höfle B,Pfeifer N.Correction of laser scanning intensity data:Data and model-driven approaches[J].ISPRS Journal of Photogrammetry and Remote Sensing,2007,62(6):415.
