一类未知参数的分数阶混沌系统投影同步的2种证明
2015-04-15孔德富赵小山天津职业技术师范大学理学院天津300222
孔德富,赵小山(天津职业技术师范大学理学院,天津 300222)
一类未知参数的分数阶混沌系统投影同步的2种证明
孔德富,赵小山
(天津职业技术师范大学理学院,天津300222)
摘要:基于分数阶稳定性理论,设计了一类普适的投影同步控制器与参数辨识规则,利用Lyapunov稳定性理论和J函数准则2种方法给予严格证明。数值仿真验证了该方法的有效性和正确性。
关键词:分数阶混沌系统;投影同步;参数识别
分数阶微积分与整数阶微积分几乎有相同的发展历史,但是近十几年来才成为国际上研究的热点。自1990年,Pecora和Carroll[1]首先提出了驱动-响应同步方法实现混沌同步以来,学者们定义了不同的混沌同步形式,如广义同步、完全同步、投影同步、延迟同步等[2-5],并且提出了多种混沌同步方法,如滑膜控制、非线性控制、自适应控制等[6-8]。本文基于分数阶稳定性理论[9],设计了投影同步控制器和参数辨识规则,并利用Lyapunov稳定性理论[10]和J函数准则[11-12]2种方法给予证明。
1 问题描述
考虑一个分数阶混沌系统为驱动系统,表示为如下形式:

对应的响应系统为:

式中:x=(x1,x2,…,xn)T∈Rn,y=(y1,y2,…,yn)T∈Rn为相应的状态变量;u(t,x,y)为合适的控制器;0<q<1。由于系统的参数是不确定的,假设δ为系统中不确定参数的待估计值,δ为系统中不确定参数的真实值,则系统中不确定参数的估计误差为:

驱动系统(1)和相应系统(2)定义同步误差为:

式中:e=(e1,e2,…,en)T;ei=yi-αx(ii=1,2,…,n);α称为比例因子。存在一个常数α(α≠0)使得:lim‖y -
t→∞αx‖=lim‖e‖=0,则称驱动系统(1)和响应系统(2)
t→∞之间实现了投影同步。
2 不确定的混沌系统投影同步与参数识别
定理1[9]对于非线性分数阶系统

式中:0<q<1;x=(x1,x2,…,xn)T为状态向量;A(x)∈Rn×n是系数矩阵。当含有状态变量的系数矩阵A(x)的所有特征值λi(i=1,2,…,n)实部都不大于零,即│arg(λi)│>qπ/2时,系统(5)渐近稳定。
根据定理1,设计如下混沌系统投影同步与参数辨识规则。
文献[13]构造了一个具有3个非线性二次项的分数阶混沌系统,并将该系统作为驱动系统表示成如下形式:
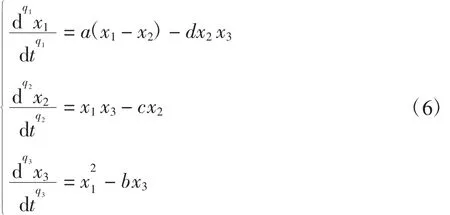
选取参数a=10、b=3、c=17、d=8,并且令q1=q2=q3=0.9,系统(6)存在混沌吸引子。如图1所示,可以清晰地看出该系统的运行轨迹为大小不等的2个双涡旋结构。
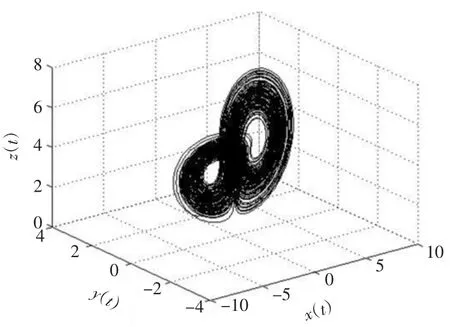
图1 系统(6)在x-y-z平面的吸引子
该系统所对应的响应系统为:
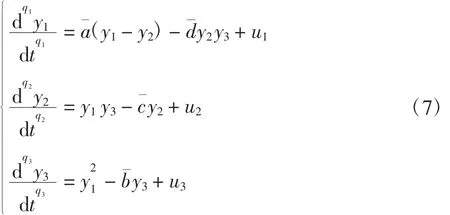
式中: a、b、c、d 分别为未知参数a、b、c、d的估计值。投影同步控制器为u=(u1,u2,u3)。
设投影同步误差为e1=y1-αx1、e2=y2-αx2、e3=y3-αx3,其中α为投影同步比例因子。未知参数估计误差设为:

定理2当设计的投影同步控制器为:
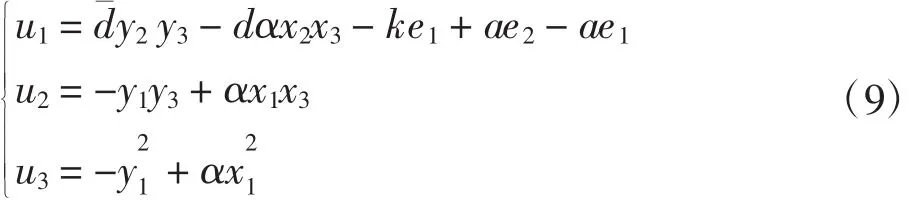
其中k≥0,未知参数辨识规则设计为:
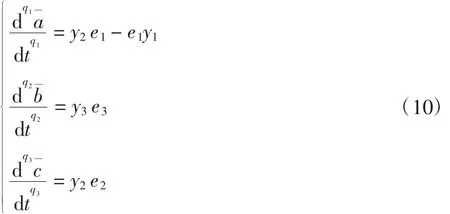
则驱动系统(6)和响应系统(7)达到投影同步,即:

证明根据系统方程(6)、(7)、(9),计算得到误差系统为:

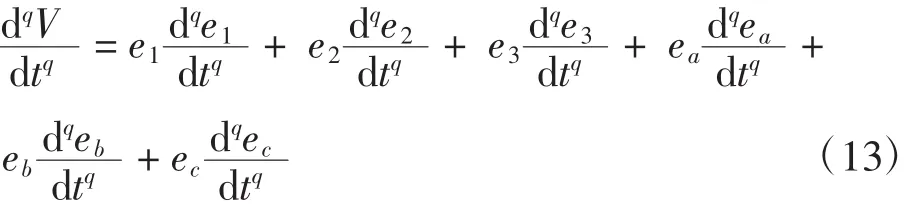
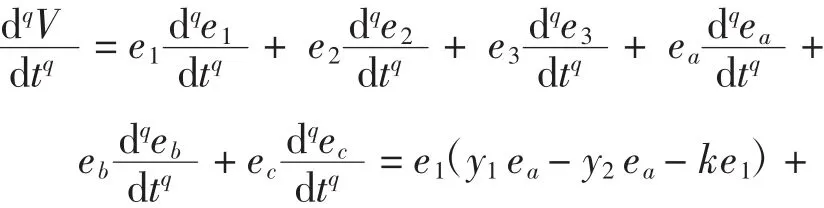
针对该误差系统(11),设q1=q2=q3=q构造如下Lyapunov函数:

则V关于时间t的分数阶导数为:


下面根据定理3,对误差系统(11)和参数辨识规则(10)进行证明。
证明构造如下形式的J函数:令q1=q2=q3=q
J=[e1,e2,e3,ea,eb,ec]·P6×·6
式中:k≥0;P6×6为6阶的单位矩阵。根据定理3,显然得出误差系统渐近稳定,同时不确定参数由估计值趋于真实值。
3 数值仿真
采用Matlab数值计算软件进行系统仿真。参数的真实值为(a,b,c)=(10,3,17),驱动系统(6)的初始值为(x(10),x(20),x(30))=(1,3,2),响应系统(7)的初始值为(y(10),y(20),y(30))=(-1,1,3),比例因子为α=0.3,同时k=10,参数估计值分别为(a,b,c)=(15,-1,1),得到投影同步误差图和参数辨识效果图。误差系统(11)的误差变化曲线如图2所示。由图2可以看到,误差函数e1和e3很快趋于0,同时e2随着时间t的增长最终也趋于0,也就是驱动系统和响应系统达到投影同步。未知参数辨识图如图3所示,由图3可以看出,a和b 很快由估计值趋近于真实值,c随着时间t的增长最终也趋于真实值,即所设计的辨识规则是正确的。
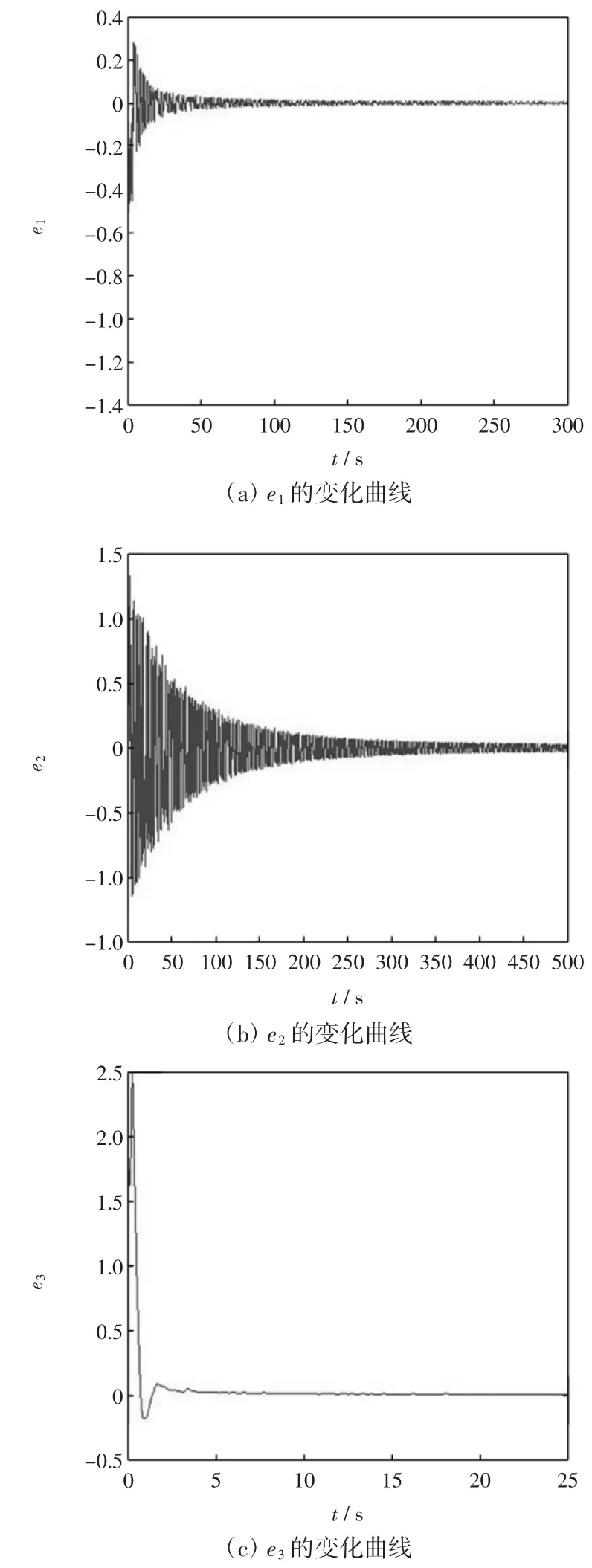
图2 误差系统(11)的误差变化曲线
4 结束语
基于分数阶稳定性理论,设计投影同步控制器与参数辨识规则,实现了驱动系统与响应系统的投影同步与参数辨识,利用Lyapunov稳定性理论和J函数法则给予证明,数值仿真验证了该方法的有效性和正确性。参考文献:
[1]PECORA L M,CARROLL T L. Synchronization in chaotic systems[J]. Physical Review Letters,1990,64(8):821-827.
[2]李芳,胡爱花,徐振源.两个不相同系统的广义同步化[J].物理学报,2006,55(2):590-597.
[3]AGIZA H N,YASSEN M T. Synchronization of R觟ssler and Chen chaotic dynamical systems using active control[J]. Phys Lett A,2001,278(4):191-197.
[4]MAINIERI R,REHACEK J. Projective synchronization in three-dimensional chaotic systems[J]. Phys Rev Lett,1999,82(15):3042-3045.
[5]贾飞蕾,徐伟.一类参数不确定混沌系统的延迟同步[J].物理学报,2007,56(6):3101-3106.
[6]TAVAZOEI M S,HAERI M. Synchronization of chaotic fractional-order systems via active sliding mode controller[J]. Phys A Statistical Mechanics and Its Applications,2008,387 (1):57-70.
[7]武相军,王兴元.基于非线性控制的超混沌Chen系统混沌同步[J].物理学报,2006,55(12):6261-6266.
[8]WANG Y,GUAN Z,WEN X. Adaptive synchronization for Chen chaotic system with fully unknown parameters[J]. Chaos,Solitons & Fractals,2004,19:899-903.
[9]张若洵,杨世平,刘永利.基于线性控制的分数阶统一混沌系统的同步[J].物理学报,2010,59(3):1549-1552.
[10]HAHN W. The Stability of Motion[M]. New York:Springer Press,1967.
[11]胡建兵,韩焱,赵灵冬.一种新的分数阶系统稳定理论及在back-stepping方法同步分数阶混沌系统中的应用[J].物理学报,2009,58(04):2235-2239.
[12]陈保颖,张家军,苑占江.分数阶Ruck lidge混沌系统的同步研究[J].动力学与控制学报,2010,8(3):234-238.
[13]杨叶红,肖剑,马珍珍.一个新分数阶混沌系统的同步和控制[J].山东大学学报,2014,49(2):76-84.
Two proofs for projective synchronization of one unknown parameter fractional-order chaotic system
KONG De-fu,ZHAO Xiao-shan
(School of Science,Tianjin University of Technology and Education,Tianjin 300222,China)
Abstract:Based on the fractional-order stability theory,a universal projective synchronization controller and parameter identification rules are designed. The method is proved strictly by using Lyapunov stability theory and J function criterion. Numerical simulations are presented to verify the effectiveness and robustness of the control scheme.
Key words:fractional-order chaotic system;projective synchronization;parameter identification
作者简介:孔德富(1988—),男,硕士研究生;赵小山(1967—),男,副教授,博士,硕士生导师,研究方向为非线性动力系统分析.
基金项目:国家自然科学基金资助项目(11302158,11302148);天津职业技术师范大学研究生创新基金资助项目(YC14-14);天津市应用基础与前沿技术研究计划青年项目(15JCQNJC01600).
收稿日期:2015-04-11
中图分类号:O415.5
文献标识码:A
文章编号:2095-0926(2015)03-0060-04