基于浮动车数据的交通事件检测方法
2015-04-14杨珍珍郭胜敏孙亚夫
杨珍珍, 郭胜敏, 孙亚夫, 高 亮
(1.北京交通大学 交通运输学院系统科学研究所,北京 100044;2.北京航空航天大学 软件开发环境国家重点实验室,北京 100191;3.智能交通技术与设备交通运输行业研发中心,北京 100191; 4.北京掌行通信息技术有限公司, 北京 100191)
基于浮动车数据的交通事件检测方法
杨珍珍1,4, 郭胜敏2,4, 孙亚夫3,4, 高 亮1
(1.北京交通大学 交通运输学院系统科学研究所,北京 100044;2.北京航空航天大学 软件开发环境国家重点实验室,北京 100191;3.智能交通技术与设备交通运输行业研发中心,北京 100191; 4.北京掌行通信息技术有限公司, 北京 100191)
为了实时准确地检测交通事件,利用交通事件中上、下游路段速度变化幅度不同的特点,提出一种基于浮动车数据的交通事件检测方法. 该方法采用余弦变换,将相邻路段之间的速度差值进行缩放,突显事件路段、事件发生时间和恢复时间的数据特征. 实例分析表明:事件路段及其下游路段的速度差时变轨迹曲线呈开口向下的抛物线;当不受事件影响时,速度差比率的余弦变换结果与y=1轴接近;当交通受事件影响时,影响越严重,速度差比率的余弦变换时变轨迹偏离y=1轴越远. 该结论能有效确定事件路段、事件发生时间、清理完毕时间和交通流恢复时间. 本文提出的检测方法,能为交通事件管理提供理论支撑和技术参考.
交通事件检测; 浮动车数据; 速度差; 余弦变换
0 引言
交通事件是造成城市交通拥堵和环境污染的主要原因,由于交通事件引起的拥堵是突发的,极易引发二次交通事故[1],因此,准确快速地检测交通事件发生位置、发生时间以及结束时间,对于交通控制和路径诱导具有重要意义. 随着GPS、GIS和无线通信技术的发展,利用浮动车采集交通信息正逐渐受到重视,与传统的道路检测技术和视频监控技术等固定点采集手段相比,浮动车具有低成本、易安装、易维护、测量范围广等优势[2]. 因此,研究基于浮动车数据的交通事件检测方法非常有必要.
目前,基于浮动车数据的交通事件检测方法成为国内外研究的热点[3-8],如Petty等[3]利用浮动车数量变化探测交通事件. 余柳等[4]提出基于CUSUM理论的自动检测算法. 张存保等[5]提出基于速度阈值的检测算法,三个周期内均低于预设速度阈值时就判断发生交通事件. Balke等[6]根据速度计算路段行程时间,通过对比每条路段的期望行程时间,判断是否发生交通事件. 颜安[7]使用模糊判别算法检测出道路的交通事件. 牛爽[8]提出一种预测偏差分析的事件检测模型. 这些方法从本质上可以分为两大类,一类以浮动车数量为研究对象,由于浮动车数据只能反映浮动车的数量,并不能代表整个路段交通量的变化情况,因此这类方法受路段浮动车数量波动变化影响明显. 另一类以速度为研究对象,这类方法考虑了速度的波动性对事件检测的影响,但多是从道路本身的速度或加速度变化趋势出发,很少结合上下游相邻路段之间的速度变化差异,涉及的速度阈值受道路等级、道路类型等影响较大.
本文利用上、下游相邻路段之间速度的变化差异,提出一种基于浮动车数据的交通事件检测方法,并用北京市实际采集的浮动车数据进行验证. 研究旨在为交通事件信息发布和交通事件管理提供理论依据和技术参考.
1 基于浮动车数据的交通事件检测方法
发生交通事件时,事件路段的部分车道不能通行(如图1所示),直接导致事件路段的通行能力降低,交通事件路段成为交通瓶颈,交通流不断聚集,形成拥挤,速度在短时间内会明显降低,通过事件路段的车辆数也随之减少;当车辆通过事件路段到达下游路段时,可行驶车道恢复正常,速度逐渐恢复到正常水平. 从大量数据分析可知,事件路段和其下游路段的路况变化特征有明显的差异.

图1 交通事件路段及其上下游交通流变化示意图
为了探讨交通事件对上、下游路段速度影响的差异,对相邻两条路段的速度进行差值处理. 定义i为采样周期标号,如果采样周期为5 min,则1天24 h共288个,i=1,2,…,288,如8:05对应的i=98.j为路段标号;v(i,j)为第i个采样周期路段j的速度;Δv(i,j)为第i个采样周期路段j与路段(j+1)的速度差值. 具体计算公式为:
Δv(i,j)=v(i,j+1)-v(i,j)
(1)
由于上、下游路段速度差值相同情况下,速度本身很低的路段受影响更明显,加入速度差比率r(i,j)来反映这种差异:
(2)
考虑到交通流的波动性,经过比值处理的速度差比率r(i,j)仍然存在的波动,且波动的尺度不好把握,需要借助数学函数变换对r(i,j)进行处理,使事件发生前后的特征进一步突显出来.
余弦函数的特点是,当自变量x值较小,接近零时,因变量cos(x)接近y=1轴;当自变量x∈[-π,π],自变量离x=0轴越远,cos(x)值偏离y=1轴越远,如图2所示.
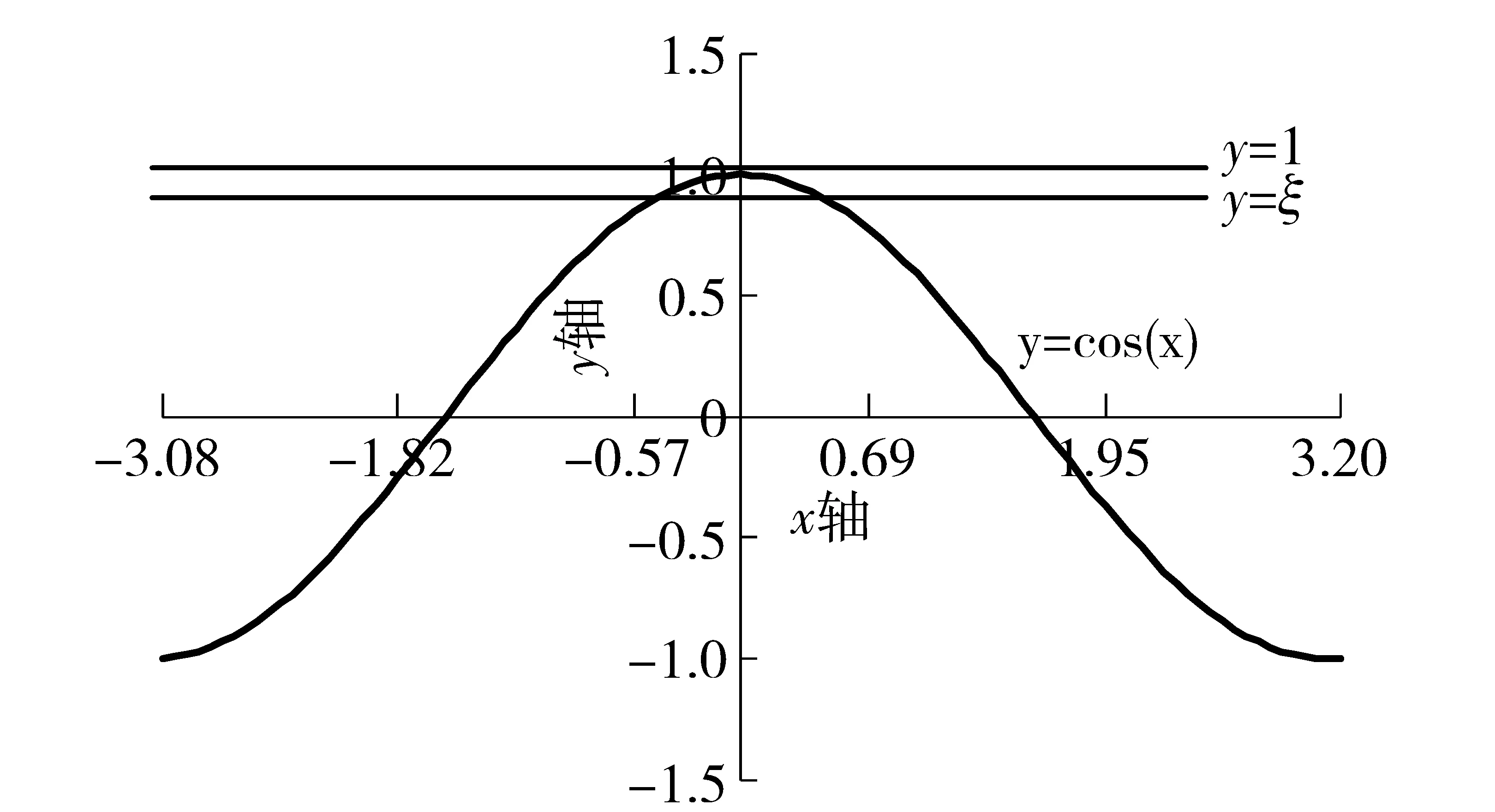
图2 余弦函数变化趋势
当没有交通事件时,上下游路段之间的速度变化不明显;当发生交通事件时,事件路段的上、下游受事件影响,速度变化差异明显,因此,可以利用余弦变换对相邻路段的速度差值比率进行处理.
定义CR(i,j)为r(i,j)的余弦变换结果,则
CR(i,j)=cos(r(i,j))
(3)
由于交通事件路段与其下游路段的速度变化差异最大,因此,受交通事件影响路段中,CR(i,j)值偏离y=1轴最远者,即为交通事件路段,具体计算公式为:

(4)
式中,link_accident表示事件路段标号;n表示参与
分析的路段数.
当没有交通事件时,CR(i,j)处于正常水平,即
ξ≤CR(i,j)≤1
(5)
其中ξ为接近1的正整数,ξ的值依据大量实测数据推测得到.
当发生交通事件,CR(i,j)偏离正常水平,即
CR(i,j)<ξ
(6)
当CR(i,j)达到最小值时,说明交通事件对交通的影响达到最大程度,判断事件清理结束,交通开始恢复.
随着路况的不断恢复,CR(i,j)的值也逐渐从最小值恢复到正常水平,即当ξ≤CR(i,j)≤1时,判断交通完全恢复正常.
2 实证研究
采用2012年3月1日北京十八里店桥北向南内侧车道发生的交通事故验证事件检测方法. 根据事故信息的文字描述,获取受影响路段. 利用北京市出租车采集浮动车数据,经过处理得到的速度数据如表1所示,时间从8:05到8:50. 通过大量的数据分析,确定参数ξ=0.966.

表1 交通事件路段及其上下游速度v(i,j) km·h-1
发生交通事件时,速度明显分为上下两层(图3):上层速度虽然有所降低,但一直处于较高的水平;下层速度发生骤降并在最低时低于20 km/h. 8:20时路段101165135(j=4)速度首先从59.79 km/h下降到25.16 km/h(表1). 相邻上游路段101165133(j=3)速度也明显降低,整体降幅略低于路段101165135(j=4). 8:25时,路段101165133(j=3)的速度从49.529 km/h降低到23.580 km/h. 8:30时,路段101165135(j=4)上游的第二条路段101165131(j=2)速度降低到37.57 km/h,下游相邻路段101165628(j=5)的速度虽然也下降,但仍然维持在较高水平. 可以初步判断101165135(j=4)为事件路段.
从图4可以看出,事件路段的下游路段与其相邻路段的速度差时变轨迹曲线呈开口向下的抛物线;而事件路段上游路段与其相邻路段的速度差时变轨迹曲线呈开口向上的抛物线. 路段101165135(j=4)和101165628(j=5)速度差拟合曲线明显高于其他路段,但两者变化趋势差别不大. 因此,利用式(2)对速度差进行比值转换,转换后的结果如表3所示,变化趋势如图5所示. 从图中可以看到,路段101165135(j=4)比路段101165628(j=5)的速度差比率时变轨迹拟合曲线明显高很多. 此时,可以明确判断路段101165135(j=4)即为事件所属路段.
利用余弦函数对r(i,j)做进一步的转换,结果如表4所示. 8:15之前和8:45之后,每条路段的CR(i,j)值均大于0.966(表4),时变轨迹均在y=1轴附近(图6);从8:15到8:45,除了路段101161251(j=7)的速度差比率的余弦变换结果几乎与y=1轴重合,其他5条路段的CR(i,j)值明显偏离y=1轴,在8:30时,路段101165135(j=4)的速度差比率的余弦变换结果CR(103,4)=-0.178 2,是所有结果中的最小值. 因此,判断事件发生时间为8:15,事件清理完毕时间为8:30,事件结束时间为8:45,交通事件从发生到完全恢复总持续时间为30 min.
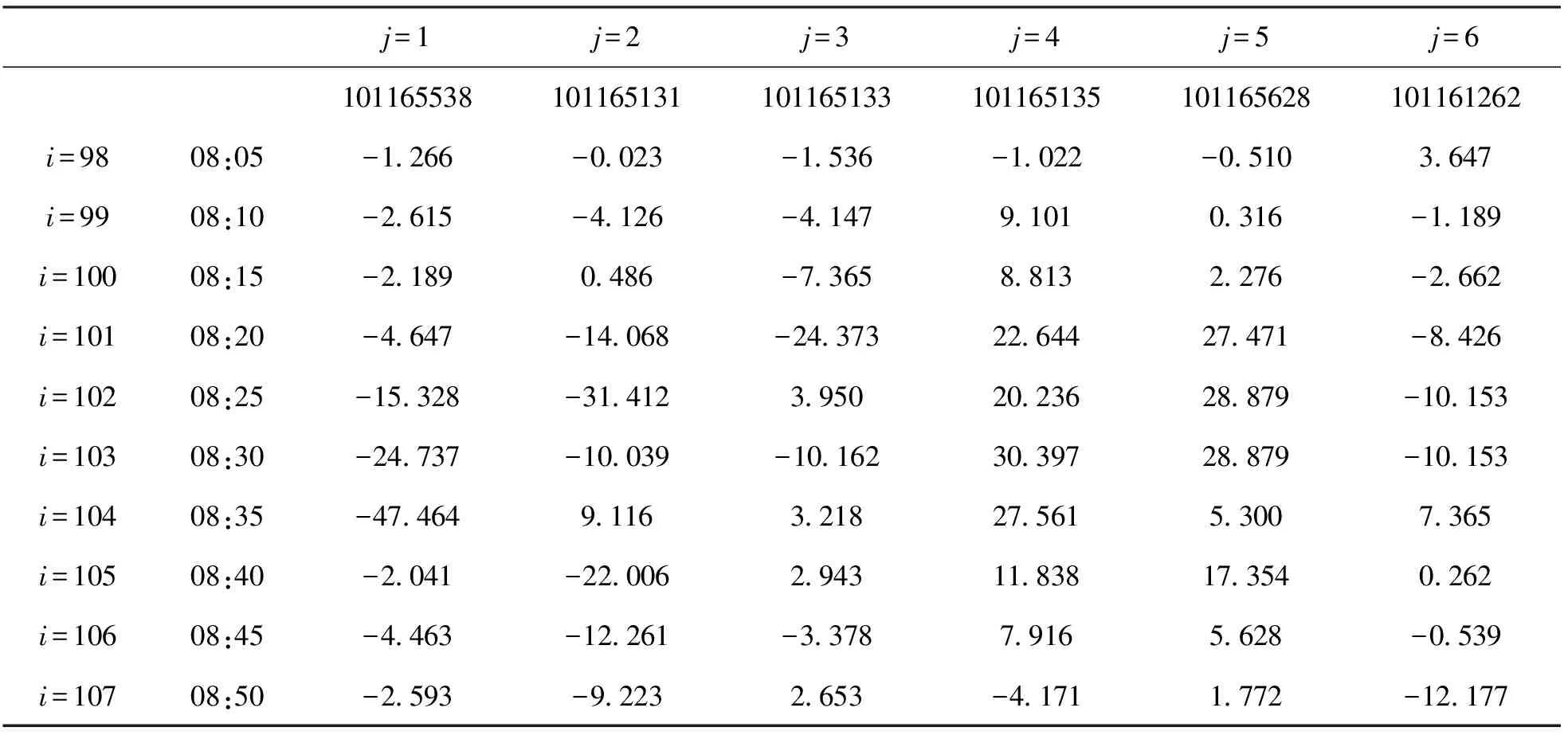
表2 相邻路段的速度差Δv(i,j) km·h-1

表3 相邻路段的速度差比率r(i,j)

表4 速度差比率余弦变换结果CR(i,j)
此外,从图6可看出,路段101165135(j=4)的速度差比率余弦变换结果CR(103,4)偏离y=1轴最远,验证了图5对事件路段判断结果的正确性.
综上所述,速度差比率的余弦变换结果CR(i,j)可以同时将事件路段、事件发生时间、清理完毕时间以及恢复时间等相关参数检测出来,验证了方法的有效性.

图3 速度v(i,j)时变轨迹
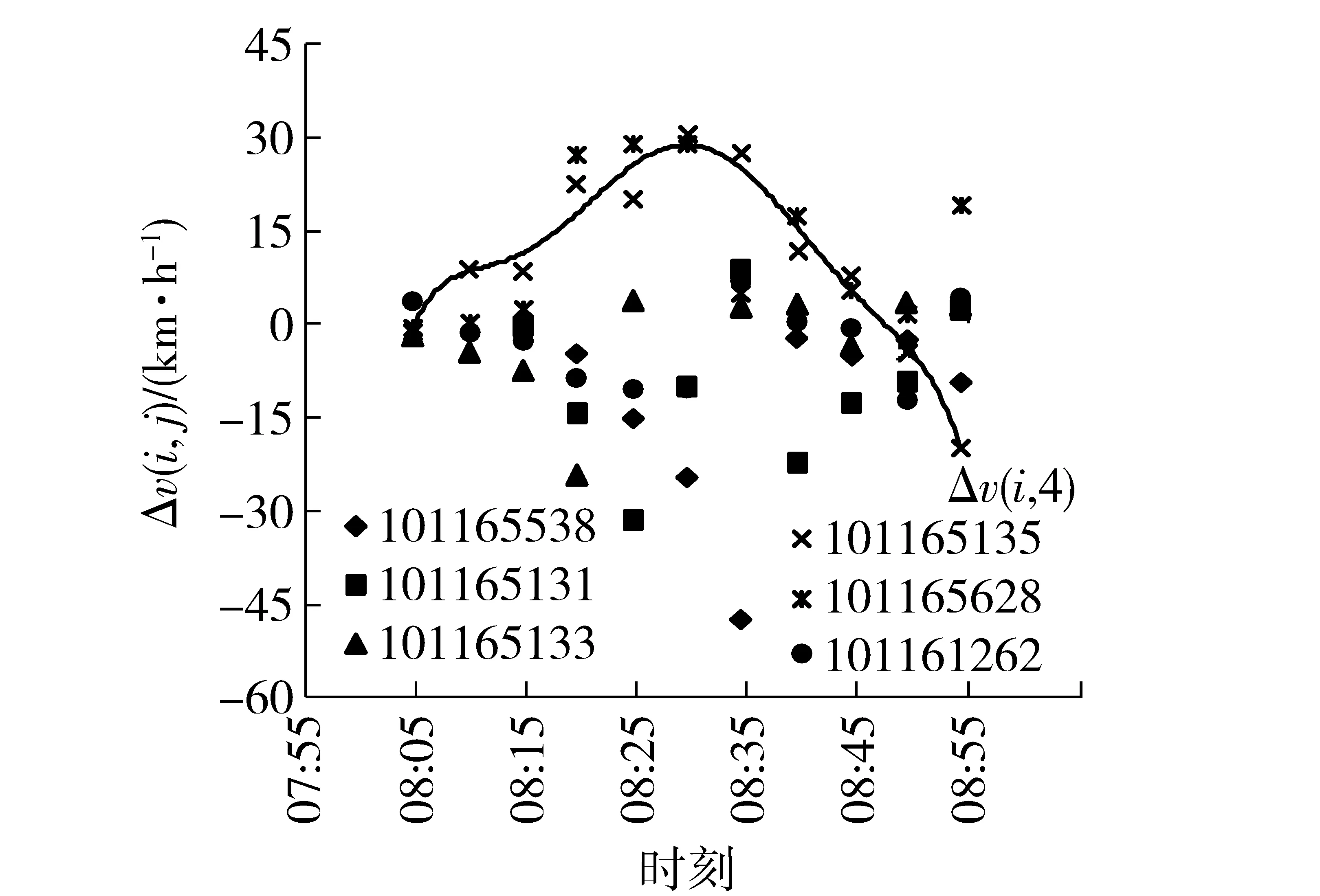
图4 相邻路段速度差Δv(i,j)时变轨迹
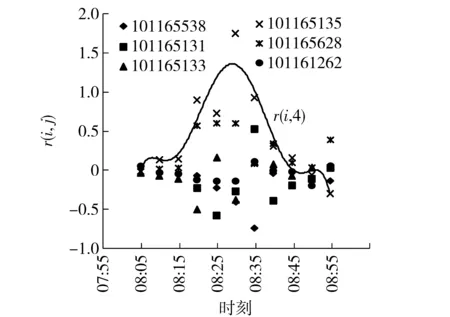
图5 速度差比率r(i,j)时变轨迹
3 结束语
本文提出了基于浮动车数据的交通事件检测方法,该方法考虑交通事件路段上、下游速度变化之间的差异,借助余弦变换对速度差值进行变换,突出事件路段、事件发生时间和恢复时间的数据特征,达到事件检测的目的. 实证研究表明:
1) 事件下游路段与相邻路段的速度差时变轨迹曲线呈开口向下的抛物线;而上游路段与相邻路段的速度差时变轨迹曲线呈开口向上的抛物线.
2) 当交通不受事件影响时,速度差比率的余弦变换结果与y=1轴接近;当交通受事件影响时,影

图6 余弦变换结果CR(i,j)时变轨迹
响越严重,速度差比率的余弦变换时变轨迹偏离y=1轴越远.
实证研究结论能有效确定事件路段、事件发生时间、清理完毕时间以及恢复时间,验证了方法的有效性. 基于浮动车数据的交通事件路段及相关时间参数检测方法,在实时运行过程中不依赖历史数据,不需要流量、密度等其他交通状态参数,能提升系统运行效率和实施可行性,为交通事件管理提供理论依据和技术参考.
[1] 杨珍珍, 干宏程. 面向交通事件管理的交通事件信息
发布方式研究[J]. 道路交通与安全, 2010, 10(4): 41-44.
[2] 诸彤宇, 郭胜敏. 浮动车信息处理技术研究[J]. 中国图像图形学报, 2009, 14(7): 1230-1237.
[3] Petty K F, Skabardonis A, Varaiya P P. Incident detection with probe vehicles: performance, infrastructure requirements and feasibility [C]. Transportation Systems 1997, Chania: Elsevier, 1997: 125-130.
[4] 余柳, 于雷, 戚懿, 等. 基于浮动车数据的城市快速路交通事件检测算法研究[J]. 交通运输系统工程与信息, 2008, 8(8): 36-41.
[5] 张存保, 杨晓光, 严新平. 基于浮动车的高速公路交通事件自动判别方法研究[J]. 武汉理工大学学报: 交通科学与工程版, 2006, 30(6): 973-975, 983.
[6] Balke K, Dudek C L, Mountain C E. Using probe-measured travel times to detect major freeway incidents in Houston, Texas [J]. Transportation Research Record: Journal of the Transportation Research Board, 1996, 1554: 213-220.
[7] 颜安. 基于GPS浮动车的城市道路交通事件检测技术研究[D]. 西安: 长安大学, 2010.
[8] 牛爽. 基于浮动车的城市道路交通异常事件检测的研究[D]. 北京: 北京交通大学, 2008.
Traffic Incident Detection Method based on Floating Car Data
YANG Zhen-zhen1,4, GUO Sheng-min2,4, SUN Ya-fu3,4, GAO Liang1
(1.School of traffic and transportation, Systems Science Institute, Beijing Jiaotong University, Beijing 100044,China; 2.NationalKey Laboratory of Software Development Environment, Beihang University, Beijing 100191,China; 3.Research and Development Center on Intelligent Transport Technology & Equipment, Beijing 100191, China; 4.Beijing PalmGo Information and Technology Co., Ltd, Beijing 100191,China)
Detecting traffic incidents timely and accurately can effectively ease traffic congestion and environmental pollution. This paper presents a parameters recognition method of traffic incident toutilize speed difference variation between upstream and downstream links. In order to enlarge features of traffic incident location, occurrence time and recovery time, the cosine transform is used to zoom speed change differences between adjacent links. Case study shows that speed difference trajectory between an incident link and its downstream link is a downward parabola, and the parabola has only one highest peak. When links are not impacted by the incident, trajectories of cosine transformsare very close to the axisy=1. When links are impacted by the incident, the more serious impacts of the incident, the cosine transform results are farther deviated from the axisy=1. The analysis results validate the effectiveness of the detection method. These key factors detected can accurately provide a support for traffic incident management.
traffic incident detection; floating car data; speed difference; cosine transform
10.13986/j.cnki.jote.2015.06.010
2015- 03- 28.
国家自然科学基金(71101009),国家自然科学基金(71131001),轨道交通控制与安全国家重点实验室(北京交通大学)开放课题自助(RCS2014ZTY8)
杨珍珍(1986—), 女, 博士研究生, 研究方向为智能交通. E-mail: yang_zhenzhen@126.com.
U 491.3
A
1008-2522(2015)06-50-05
