基于单目视觉在智能车库管理中的运用
2015-04-13邓荣标吴智量
邓荣标 吴智量


摘 要: 针对停车场智能化管理中的一些问题,提出车辆数字信息实时对比、提高车库(停车场)管理的智能化的设想。通过几何方法和利用单目测距技术获得车辆图像而进行图像处理,运用Matlab来计算还原车辆的三维空间信息。实验结果有效地实现了车辆的信息还原,使车辆信息实时对比成为了可能,有效地促进了车库的智能化管理。
关键词: 图像处理; 单目视觉; 信息还原; 智能车库管理
中图分类号: TN967?34 文献标识码: A 文章编号: 1004?373X(2015)01?0160?03
Abstract: Real?time comparison of car digital information is proposed to improve the intelligent degree of the garage ma?nagement in order to solve problems found in the intelligent garage management. The pictures of cars are obtained for image processing by means of the geometric method and molecular range finding technology. The three?dimensional spatial information of such cars is recovered with Matlab. The experimental results validate the method can recover the car information and promote the intelligent garage management efficiently.
Keywords: image processing; molecular vision; information recovering; intelligent garage management
随着机动车越来越多,停车场(车库)亦越来越多,车辆的管理问题也日益增多,而目前停车场管理的智能化主要体现在出入读卡、车牌识别为主,从安全的角度来说,单从保管卡与车牌来管理还远远不够。为了增加安全系数,有许多的车库通过闸门识别车牌的同时拍下车辆照片,在需要调用时进行比对识别,这种管理技术无法将车牌与车辆信息实时、有效结合。如果在进入车库时,将拍下的车辆图像进行数字化处理与信息还原,则可将出入卡、车牌信息以及车辆信息结合起来,将会实现车辆信息的实时对比。本文针对现有监测车辆信息管理系统的局限性,利用图像畸变原理和摄像头成像原理,通过还原车辆的三维空间信息,提出了车牌与车辆信息的实时结合,提高停车场管理的智能化的设想,对图像的获取与还原进行了以下探讨:
1 图像的获取及处理
1.1 图像获取和摄像头的抖动修正
通过继电器电平触发开关控制固定的单目摄像头,对车辆自动捕抓背景图像和目标图像。由于天气光线强度的变化等户外因素的影响,获取背景图片需要及时更新,所以每次都需要在目标离开摄像范围后进行背景捕抓。
此外,由于风吹等其他各种因素的影响,在处理图像对比前需要对抖动进行修正、扩边、加噪、软化小边缘、降噪处理。
1.2 图像的二值化、RGB消影与小波降噪及特征强化
RGB彩色模型对应笛卡尔坐标系中的一个立方体,当[R=G=B=0]时表示黑色;反之当[R=G=B=]MAX最大值时表示白色。立方体空间中的各点表示其他颜色。
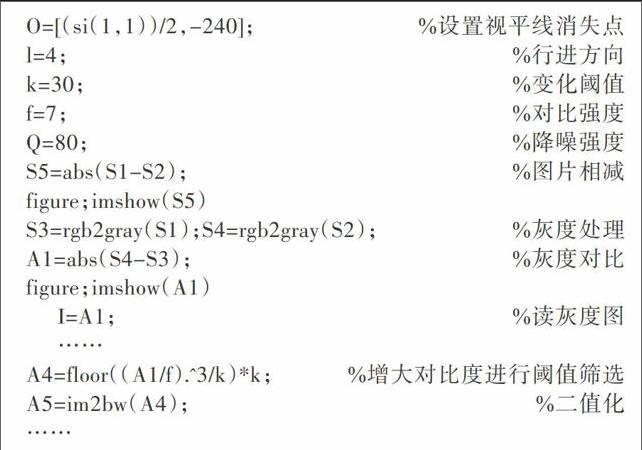
图像进行抖动修正后,再利用Matlab程序,删去影子的灰度图像。定义图片每一点的单元信息表示为(x,y,单元),建立起图像信息矩阵,对“单元”信息进行归一单位化;采用“目标图像减去背景图像”便可达到提取小车灰度图像的目的:
(1) 让两幅图进行RGB向量单位化,将其进行对应的两两相乘。
(2) 方向相近的相乘就会接近1,此时再设置阈值便可弱化影子。
1.3 邻域统计去除杂点
图像二值化后,在不为0的点上分划出一个微小的邻域,统计累加当中为1的点的个数,排除统计和小于邻域面积30%的点。干扰杂点分布是不连续性的,所以杂点一般随机性出现图像时,如人、树叶、动物等干扰杂点,都能有效排除。对于人等较大物体,采用邻域统计去除杂点的逐步修正,邻域由大至小,先在较大的邻域,整体性地去除图像中比较大或集中的杂点,而小邻域统计则是对杂点去除修正,去除汽车旁较小的独立点,这样既保留车辆完整的信息,又有效去除所有杂点。
2 关键点的获取与还原
2.1 特征点的寻找
针对二值化的图像进行主轮廓的提取,得到外轮廓的边缘图像,同时过滤内部的轮廓和无用的分支轮廓信息。选取在轮廓曲度最大或轮廓方向突然改变的地方,也就是棱角为关键点,利用不同的斜率的线性方程来截获顶点。对于轴距的寻找,可利用定出车长轴线方向后截取,前后轮的区别可以用增减斜率的微小参量来获取。如图1所示。
2.2 空间信息的还原
利用基于透视原理的单目测距,将摄像头捕获的点还原成现实空间的信息。摄像头的成像的大小只与入射的视夹角[θ]的大小有关。如图2所示,在平面W延伸至无穷远处时,视观察方向与W平行,两者交点可视为两平面在无穷远的交线,Q即是无穷消失点。过无穷消失点Q做视平线I。
3 实验结果
利用单目测距法对不同大小、不同位置的汽车进行测量实验,得出如图3所示的结果。
实验数据表明,车辆的信息还原虽然有一定的误差,但与原型基本符合。利用图像畸变原理和摄像头成像原理,通过还原车辆的三维空间信息,可以实现车辆信息的实时对比,将提高停车场(车库)智能化的管理。
4 结 语
基于单目测距的空间信息还原的应用远远不止用于停车场的管理,还可以利用摄像头对车辆进行二次捕捉,记录两次捕捉的时间与距离,计算出车速,可运用在高速公路等地进行超速的监测。该图像测速比现在使用的红外或多普勒测速相比,具有准确测出实际速度及行使方向、难于被电子狗等设备提前捕获等优点,可有效地摆脱传统多普勒测速方法的局限性,使公路监控更具有准确性和隐蔽性,可广泛地运用于智能交通的管理。
参考文献
[1] 车敏,张红梅.Matlab与VC联合编程在数字水印工程中的应用[J].现代电子技术,2010,33(24):67?69.
[2] 董建婷,王杰.C++调用Matlab实现图像处理的3种常用方法比较[J].现代电子技术,2012,35(16):122?124.
[3] 段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005(3):75?78.
[4] 张天祥,黄小欣.基于Matlab实现小波阈值去噪的图像处理方法[J].现代电子技术,2013,36(5):103?106.
[5] 赵庆鹏,马华东.自适应几何畸变图像矫正方法研究[C]//第三届和谐人机环境联合学术会议(HHME2007)论文集.北京:清华大学出版社,2007:376?380.
[6] 陈大海,莫林,易向阳.固定摄像头图像中测算目标距离和尺寸的算法[J].大众科技,2011(8):1?5.
[7] 岳亮,李自田,李长乐,等.空间目标的单目视觉测量技术研究[J].微计算机信息,2007,23(2?3):273?275.
[8] 郭磊,徐友春,李克强,等.基于单目视觉的实时测距方法研究[J].中国图象图形学报,2006(1):74?81.
[9] 廖士中,高培焕,苏艺,等.一种光学镜头摄像机图象几何畸变的修正方法[J].中国图象图形学报:A辑,2000(7):593?596.
[10] 沈春生,王耀南.移动机器人目标分割及测距方法研究[J].计算机工程与应用,2011(23):181?184.
