某卫星通信天线伺服系统的设计与实现
2015-04-13章百宝陈涛
章百宝 陈涛

摘 要: 为实现车载卫星通信天线对星的快速性和准确性,设计了一套以DSP+FPGA架构为控制核心的卫星通信天线伺服系统,介绍了该系统的组成、工作原理及硬件原理框图,并对电机选型参数做了详细计算,对天线寻星过程和伺服控制算法做了详细描述和设计。该伺服系统的设计与实现对降低卫星通信系统成本、提高卫星通信天线对星的快速性和准确性具有一定的工程参考价值。
关键词: 卫星通信系统; 伺服控制; 粗对准; 精对准
中图分类号: TN828.5?34 文献标识码: A 文章编号: 1004?373X(2015)01?0059?03
Abstract: To realize the rapidity and veracity of aligning with the satellite for vehicle?mounted satellite communication antenna, a satellite communication antenna servo system with DSP+FPGA as its control core was designed. The composition, working principle and hardware block diagram for the system are described. The parameters of motor are calculated particularly. The process of the antenna′s satellite founding and servo control algorithm are elaborated and designed. The implementation of the servo system is helpful to cost reduction of satellite communication system, and the rapidity and veracity improvement of aligning with the satellite.
Keywords: satellite communication system; servo control; coarse alignment; refined alignment
0 引 言
近年来,卫星通信系统以其不受自然条件和地域限制、机动灵活、通信距离远、覆盖面积大、通信质量高等优点,在军用和民用领域得到越来越广泛的应用,如战场军事通信、反恐应急通信、灾害现场、卫星电视广播和天气气象的遥测遥感等。如何快速准确地对星是衡量车载卫星站应用性能的重要指标,为此研制了一套车载卫星通信天线伺服系统,能够快速完成准确对星工作。该卫星通信天线伺服系统自动捕获卫星时间≤3 min,定位精度≤0.2°,抗风能力[≥20 ]m/s,系统储存量可达1 MB,并具备可靠性高、环境适应能力强、电磁兼容性优等特点。
1 系统设计方案
本系统主要由伺服控制单元、天线单元、电机、GPS、倾角传感器、信标接收机、系统安全保护单元、功率驱动单元、角度编码单元、系统限位开关等组成,如图1所示。
系统的工作原理如下:系统上电后,根据使用者输入的对星需求信息,自动采集对星需要的诸如天线姿态、天线地理位置、系统限位开关状态等信息,计算出天线的预置方位角、俯仰角和极化角,控制并驱动天线直到信标接收机中输出的AGC(直流电压)电平信号大于预设电平门限值,从而完成对星的粗对准;粗对准工作完成后,系统又会在粗对准后的位置附近结合信标接收机的输出电平AGC的大小变化做微动精确跟踪,最终找到信号最强(AGC电平值最大)的位置作为对准卫星的目标位置,并储存该位置以便为下次寻星作参考。图2为系统的工作原理框图。
2 伺服控制单元设计
本天线伺服系统采用高性能DSP + FPGA架构作为系统控制核心,因DSP具备指令周期短、运算精度高等特点,因此选用高性能DSP芯片TMS320F28335 完成天线控制与位置解算功能,从而满足控制系统的时效性和精确性;又因FPGA具备逻辑单元丰富、集成度高以及工作稳定可靠等特点,因此选用XC2S300E?6PQG208I型FPGA实现DSP外设接口的扩展,即在单片XC2S300E?6PQG208I上完成操控输入及显示、数据采集、滤波及控制算法处理, 并输出PWM 信号进行电机调速控制,从而满足天线伺服系统中多电机、多编码器、多通信接口以及系统操控界面接口的需要。伺服控制单元框图如图3所示。
由图3可以看出,系统要实现的控制功能比较复杂, 主要体现在: 天线姿态、天线地理位置的解算,主天线方位、俯仰角度的闭环运动控制,馈源极化角度的闭环运动控制,卫星位置的存储,系统限位开关的采集与安全保护单元的联锁设计,显示接口与界面的设计,操控面板的设计等。
由图3还可以看出,系统所有外设接口均通过FPGA进行扩展,并采用了光隔,确保控制单元运行的稳定性和可靠性。
3 电机的选型及计算
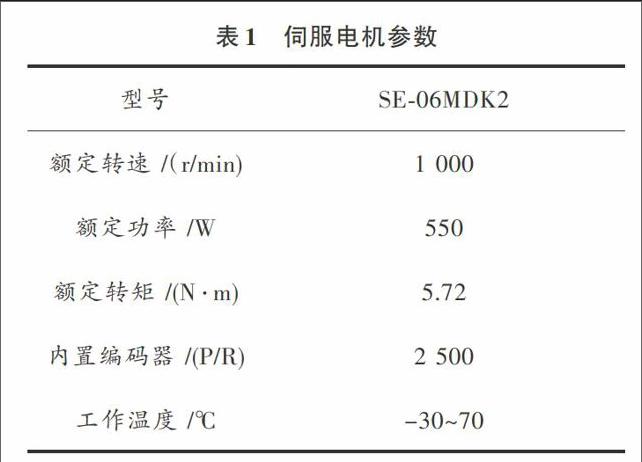
3.1 主天线电机选型及计算
3.1.1 天线转台加/减速时所需要的力矩
4 卫星通信伺服控制算法
为了实现天线高精度指向卫星,本天线伺服系统采用了粗精对准相结合的方式进行对星,即先利用预设的卫星位置计算出天线理论指向角,实现天线的粗对准;再通过监测信标接收机输出的AGC电平信号强度,实现天线的精对准。
4.1 天线粗对准控制算法
天线粗对准控制算法即天线理论指向角的计算,这包括天线俯仰角[E、]天线方位角[A]和馈源极化角[P]的计算。
在天线粗对准过程中,将目标卫星的轨道信息(卫星的在轨经度)输入伺服控制单元,利用GPS接收机测得天线所在地的经纬度信息。伺服控制单元进行姿态解算后得到天线对准目标卫星所需要的方位角、俯仰角和极化角,然后驱动各电机运动以实现对卫星的搜索。在对星的过程中同时要利用姿态传感器不断检测天线波束的实际指向信息,得出天线实际角度和理论角度的差值,伺服控制单元根据这些差值驱动天线的方位、俯仰和极化方向的电机不断转动,通过不断地比较,驱动天线最终指向卫星。在天线转动的同时还要不断采集信标接收机输出的AGC电平值的大小,该值也作为一个反馈信号反馈至伺服控制单元,判断该值与预设电平门限值的大小。当采样的电平值大于该门限值后,结束粗对准状态,进入精对准状态;否则,则需继续转动天线进行对准。
4.2 天线精对准控制算法
天线完成了粗对准后,天线进入能收到信号的范围,但是收到的信号强度较弱,距离信号最强指向还有一定的角度差。为了使信号接收效果达到最佳,需进行天线精对准。在这一阶段,需在粗对准后的位置附近结合信标接收机的输出电平AGC的大小变化做微动精确跟踪,最终找到信号最强(AGC电平值最大)的位置作为对准卫星的目标位置。天线精对准控制算法图如图4所示。
5 结 语
笔者详述了采用DSP+FPGA架构为控制核心的车载卫星通信天线伺服系统利用双轴倾角传感器和GPS测得的数据为参数来对星的控制算法,并利用信标接收机接收到的AGC电平值大小作为是否准确对星的关键,这对降低卫星通信系统成本、提高卫星通信天线对星的快速性和准确性具有一定的工程参考价值。
参考文献
[1] 韩文泽.DSP控制器在天线伺服系统中的应用[J].计算机网络,2005,28(9):60?61.
[2] 姜迪开,刘刚,李光军.卫星天线指向机构控制系统的设计与实现[J].微电机,2011,44(8):36?40.
[3] 刘英,路志勇,武伟.卫星通信天线自动极化调整技术[J].无线电工程,2012,42(7):46?48.
[4] 兴涛.一种静中通卫星天线对星策略[J].电视技术,2011,35(7):126?127.
[5] 刘英,路志勇,武伟.一种卫星天线伺服控制系统的设计[J].自动化应用,2011,29(12):15?17.
[6] 范利娟.便携式卫星通信控制系统研究与设计[D].南京:南京理工大学,2010.
[7] Texas Instruments. TMS320F28335 digital signal controllers data sheet [R]. USA: Texas Instruments, 2007.
[8] Xilinx Corp. Spartan?IIE FPGA family data sheet [R]. USA: Xilinx Corp, 2008.
