汽车碰撞试验测量系统中定标墙的校准方法研究
2015-04-13陆佳艳许静瞿剑苏曹铁泽甘晓川
陆佳艳,许静,瞿剑苏,曹铁泽,甘晓川
(1.中航工业北京长城计量测试技术研究所,北京100095;2.一汽-大众汽车有限公司,吉林长春130011)
0 引言
随着汽车的不断普及,人们对汽车安全性能的要求越来越高。汽车碰撞试验是用于综合评价汽车碰撞安全性能的最基本、最有效的方法[1-2],是汽车制造商用于分析碰撞前后试验车变形及损伤情况的主要依据,以此改善车辆的安全性能,提高交通安全。
中国新车评价规程(C-NCAP)中关于碰撞试验的规定主要有正面100%重叠刚性壁障碰撞试验、正面40%重叠可变形壁障碰撞试验、可变形移动壁障侧面碰撞试验等,通过测定车辆各种可能发生碰撞情况下被撞击部位的结构和形变状况[3],给出碰撞前后车体的变形量,并根据变形量的大小判断车体的刚性是否满足安全要求。
碰撞车辆变形测量分析系统(DMAS)是用于测量和分析车辆在碰撞试验后车体形变和部件受损状况的装置,其测量标准是布设在定标墙上的固定标识点,这些点的空间坐标需要预先标定。为了解决标识点的标定问题,本文提出了一种基于摄影测量原理的校准方法,利用摄影测量系统与标准尺,通过合理布局实现定标墙的高精度校准,保证汽车碰撞试验数据准确可靠,为汽车的设计、制造提供可靠的依据,达到进一步提高汽车安全性能的目的。
1 DMAS 中的定标墙
常用的汽车碰撞变形测量技术有固定式三坐标测量技术、关节臂测量技术和DMAS 等。其中固定式三坐标测量技术测量精度较高,但测量成本也比较高;关节臂测量技术由于测量臂形状受限,多数测量需要通过转站来完成,测量效率比较低。
DMAS 由定标墙、移动探针和数据处理系统组成,见图1。该测量系统的优势在于测量范围不受限制;用于测量的移动探针只有小型吹风机大小,可以自由地测量车辆的任意部位,目前在各大主要汽车制造企业都得到了广泛的应用。测量过程中,试验车辆稳定停放于定标墙空间范围内,当移动探针接触到被测试验车时,探针上的CCD 数码相机将拍摄到定标墙上当前位置的图片,通过该图片里包含的编码点和标识点数据信息经数据处理系统计算后获得试验车上当前探针的坐标,重复该过程最后获得整车及零部件的所有数据,经数据处理系统图形化显示车辆整车和关键部位的形状变化。

图1 汽车碰撞试验测量系统
定标墙是DMAS 中的重要组成部分,由10 万多个编码点和标识点组成,见图2。其中,白点是编码点,用于定标墙的区域识别;黑点是标识点,为计算探针当前位置提供标准值。编码点和标识点按照均匀交替的分布规律进行设置,组成DMAS 的测量空间基准网,测量基准通过定标墙上已知标识点的空间坐标来复现。所以对于定标墙上标识点位置的校准是保证测量过程数据正确性的重要方面,是正确获取试验车碰撞形变的实验数据和分布的重要保障。
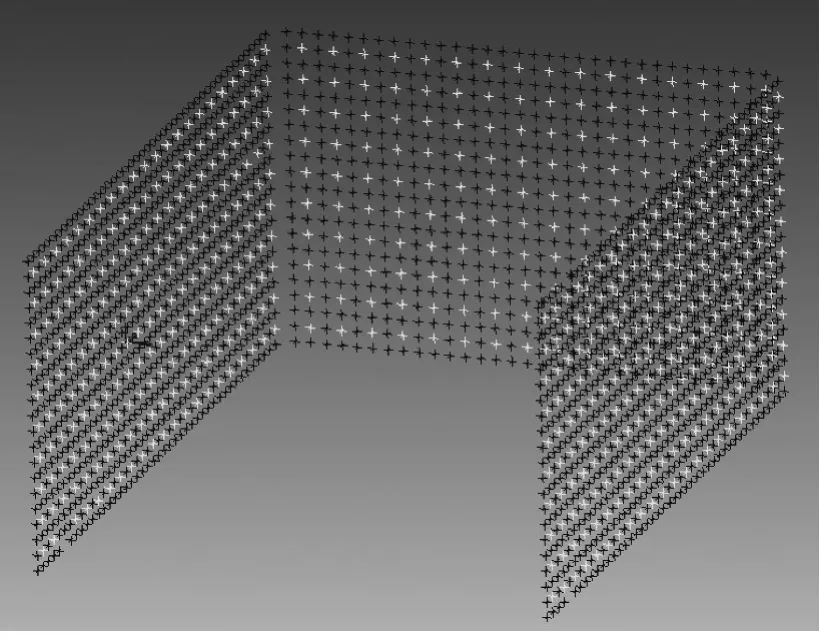
图2 定标墙编码点和标识点布局规律
2 DMAS 中定标墙的校准方法
定标墙的空间范围一般在8 m×10 m×10 m,是一个大尺寸空间测量网络。组成定标墙的3 面墙体上布设有5 万多个需要准确测量的标识点,汽车碰撞试验的误差要求不大于1 mm,对标识点的空间坐标误差要求就应该控制在0.1 mm,对于如此大范围的空间坐标校准,该技术指标要求非常严格。
目前,校准定标墙上标识点还没有有效的方法,能够识别标识点的方法只有经纬仪瞄准法和摄影测量法。经纬仪法虽然测量精度高但是测量效率低,不适合定标墙上大量标识点的测量;摄影测量法的测量效率相对较高,所以定标墙标识点的坐标校准采用摄影测量法完成。
摄影测量是指利用摄像技术摄取物体的影像、识别物体并精确测定其形状和位置的方法,数字摄影测量系统如图3所示。从不同的角度、位置对被测物上的编码点和标识点进行拍摄,所得相片经过数字处理并通过标准尺的长度约束,最终准确地得到标识点的三维坐标[5-6]。由摄影测量法的原理可知,标准尺的作用是为相片提供比例因子的,理想情况下标准尺和被测量的物体至少在一张图片中被完全包含,这样会在很多相匹配的图片中有多个共同的标识点,可以提高测量精度[6]。当被测量对象比较大时,就要求整个测量过程中尽可能多地包含标准尺的完整信息,但是具体需要多少标准尺的信息,目前没有一个明确的定义,对于精度的提高也没有明确的规律,为此,需要进一步研究标准尺的优化布局,以满足定标墙的高精度校准要求。定标墙校准精度的验证可通过比较标准尺的测量值和校准值得到,其溯源链图如图4所示。

图3 数字摄影测量系统示意图

图4 定标墙的溯源链图
3 标准尺优化布局
标准尺的优化布局包括标准尺的位置、数量和姿态的布局,本文针对定标墙的其中一面墙,在一系列实验的基础上总结出适合于定标墙的校准方法,并通过标准尺向干涉仪溯源,保证了定标墙的测量结果量值准确、溯源有据。
理论上只要在摄影测量系统视场内布设一个标准尺就可以为系统本身提供比例因子,但在大空间测量中,由于标尺的长度受限,用短标尺为大空间进行比例标定,会放大比例误差;另外标尺的摆放方向决定了所提供的测量比例因子只能对视场内该方向上的测量结果提供同比修正,而对其它方向上的测量结果存在修正误差。
为了满足定标墙的校准需求(定位测量不确定度0.05 mm),设计了六组比对试验,每组布设的标准尺的位置和数量各不相同,通过求解已知两目标点之间距离的偏差值来判断标准尺的布局的合理性。图5 为定标墙对比试验示意图,表1 为六组比对试验设置,表2 为六组对比试验结果的偏差。表2 中,标称值为用干涉仪校准两目标点间的校准值,此时作为标准值使用;偏差值为用摄影测量法测量相应目标点获得的距离值与标称值的差值。
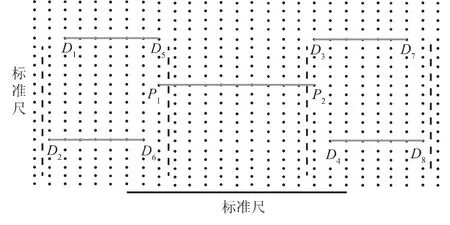
图5 定标墙对比试验示意图

表1 六组对比试验设置
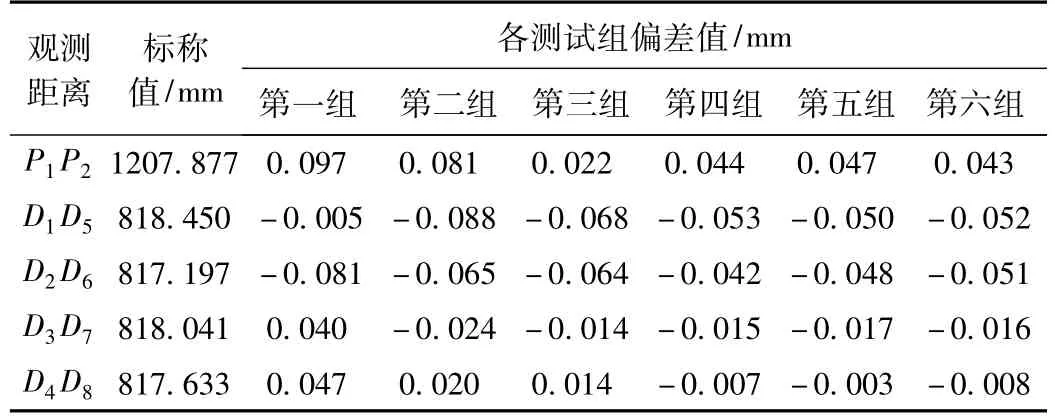
表2 六组对比试验结果偏差值
由表2 的试验数据绘制观测距离的长度偏差变化趋势,如图6所示。由此可以看出第四组、第五组、第六组测量结果基本保持一致,测量重复性在0.005 mm 以内,说明这几组标准尺的优化布局能有效提供定标墙上各方向的比例因子,为各方向提供偏差修正,使得每组观测结果的标准偏差均不超过0.04 mm,满足了定标墙的校准需求。综合考虑校准条件、校准效率等因素,第四组的优化布局是最合适的。
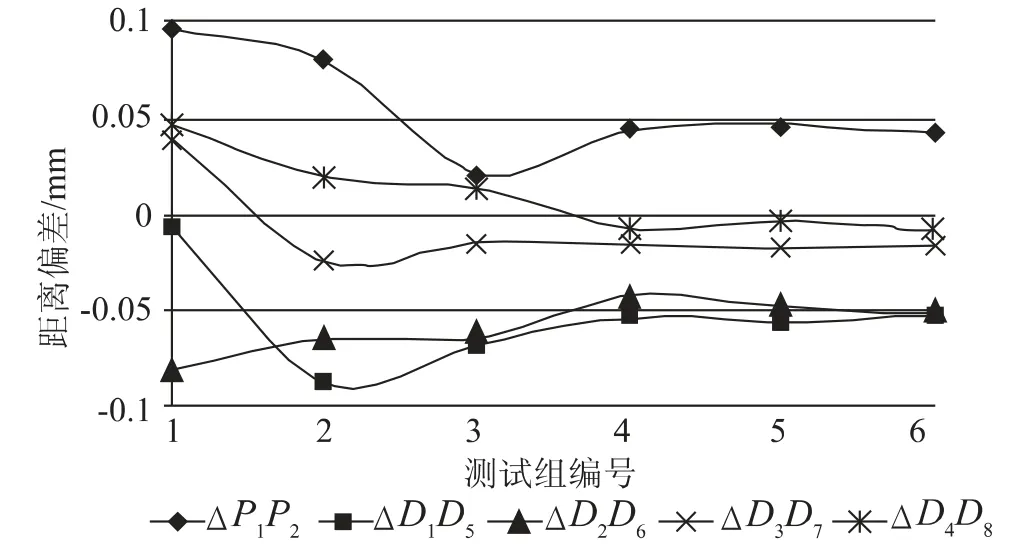
图6 观测距离的长度偏差变化趋势
通过上述试验,结合第四组的布局特点可以归纳出如下几点校准原则:
1)校准时,需要有一根横向的标准尺,放置于测量区域的中间位置,其长度控制在1 ~2 m,且保持固定不动;
2)校准时,标准尺的摆放应该考虑测量空间的分布方向,如水平、垂直、倾斜和纵深等,标准尺并不是越多越好,对一个平面而言,4 根标准尺完全满足要求;
3)校准时,标准尺应尽量涵盖整个测量区域,即:在校准区域的两端和中间各放置一根标准尺,但不要太靠近边缘。
依据上述原则,对8 m×10 m×10 m 空间的三个定标墙给出了如图7所示的校准方案:方案中每面定标墙摆放4 个标准尺,为了保持数据闭合,在墙1、墙3 之间又增加了一个标准尺,标准尺总共摆放了13 个位置。经实验验证,该方案与每面定标墙只摆放一个标准尺相比,校准精度大大提高了,完全满足0.05 mm的校准要求。

图7 标准尺的摆放方案
4 总结
本文提出了一种汽车碰撞试验定标墙的现场校准方法,利用摄影测量系统与标准尺,通过合理布局实现了定标墙的高精度校准。上述现场校准方法已应用于长春一汽—大众汽车有限公司的定标墙的校准,通过对标准尺的位置、数量及姿态的优化,采用常用的摄影测量系统对DMAS 的定标墙进行校准,定标墙现场校准误差小于0.05 mm,完全满足0.1 mm+1×10-4L 的测量要求,由此进一步证明该校准方案切实可行。
[1]颜燕.汽车碰撞试验及数据处理方法研究[D].长春:吉林大学,2008.
[2]黄虎,常健,何稚桦,等.汽车侧面碰撞试验探讨[J].上海工程技术大学学报,2002,16(2):105-109.
[3]郑祖丹,胡伟强,吴斌,等.汽车碰撞测力墙的研制[J].上海汽车,2014,11(2):105-109.
[4]王占强.碰撞史话—揭秘汽车实车碰撞试验的前世今生[J].世界汽车,2014(10):116-121.
[5]郑建冬.基于单数码相机的三维摄影测量理论与关键技术研究[D].南京:南京航空航天大学,2013.
[6]肖振中.基于工业摄影和机器视觉的三维形貌与变形测量关键技术研究[D].西安:西安交通大学,2010.
