中间位置转向力特性主客观评价相关性的研究*
2015-04-12党建民赵祥磊楼黎明中野史郎
党建民,陈 慧,赵祥磊,楼黎明,中野史郎
(1.同济大学汽车学院,上海 201804; 2.同济大学新能源汽车工程中心,上海 201804; 3.株式会社捷太格特研发中心,日本奈良)
2015163
中间位置转向力特性主客观评价相关性的研究*
党建民1,2,陈 慧1,2,赵祥磊1,2,楼黎明3,中野史郎3
(1.同济大学汽车学院,上海 201804; 2.同济大学新能源汽车工程中心,上海 201804; 3.株式会社捷太格特研发中心,日本奈良)
本文中对中间位置转向力特性主客观评价的相关性进行了研究。首先基于线控转向系统,针对中间位置转向建立了一个参数可调的转向力特性模型,运用均匀试验设计方法分析了12种不同的中间位置转向力特性。评价人员在驾驶模拟器上对这12种不同转向力特性进行了主观评价。同时,通过离线仿真,按照ISO中间位置操纵特性试验方法对这12组力特性进行了客观评价试验。然后应用多元线性回归方法分析主观评价项目与客观评价指标之间的相关性。结果表明,应用建立的相关性对主观评分进行预测的平均相对误差小于4%。最后,基于所建立的多元线性回归模型求取了关键客观评价指标的理想值。该方法可有效地指导转向系统的开发。
中间位置转向;主观评价;客观评价;相关性;多元线性回归
前言
整车的开发过程仍然非常依赖于主观评价。而主观评价存在着可重复性差、开发周期长、开发成本高等缺点。为利用客观评价试验的优势来弥补主观评价的不足,文献[1]~文献[6]中针对操纵稳定性的主客观评价的相关性进行了研究。研究的主要目的就是希望能够在新车的开发过程中,应用该相关性对主观评价结果进行预测,并用来指导设计[7]。然而,目前所进行的研究主要以市场现有汽车或更改一辆汽车不同的结构参数配置作为评价样本[4-5],这可能导致部分客观评价指标的取值分布相对狭窄,不利于相关性关系的建立。
本文中旨在探索一种针对中间位置转向感觉[8]建立可靠的主客观评价相关性的方法,提出借助线控转向系统转向特性任意可调的优势,实现相对广泛的转向特性和客观评价指标的取值分布,以利于建立显著的主客观评价相关性。首先,基于参数可调的转向力特性模型分布了12组转向力特性作为评价样本,并分别进行了中间位置操纵区域的主观评价试验和客观评价试验。然后应用多元线性回归方法建立了主观评价项目和客观评价指标之间的相关性。最后重新分布了8组不同的转向力特性,并基于获得的相关性对主观评分进行了预测。通过对比预测值与评价人员的实际评分值,验证了相关性的可靠性。同时,基于经过验证的相关性求取了关键客观评价指标的理想值。
1 转向力特性设计
转向力特性由5个可调参数确定,见图1和表1。其中S为θ1处两条虚线之间的差值。转向因为在试验过程中车速为100km/h,因此车速并不作为转向力特性的影响因素。
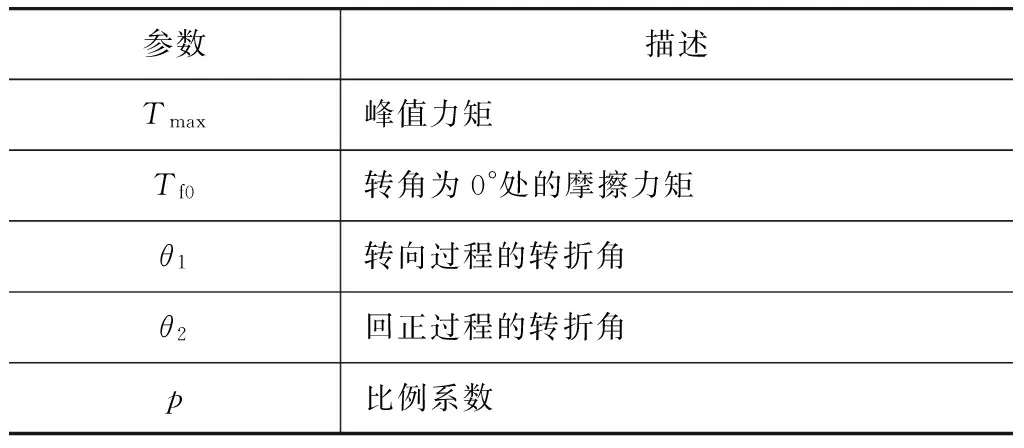
表1 转向力特性模型中的可调参数
通过对这5个可调参数的不同取值进行组合便可得到一系列转向力特性。为能够在尽可能少的试验次数下得到尽可能多的信息,应用均匀试验设计方法设计这些参数的分布。其中θ1设为常数[9],另外4个参数的分布见表2。
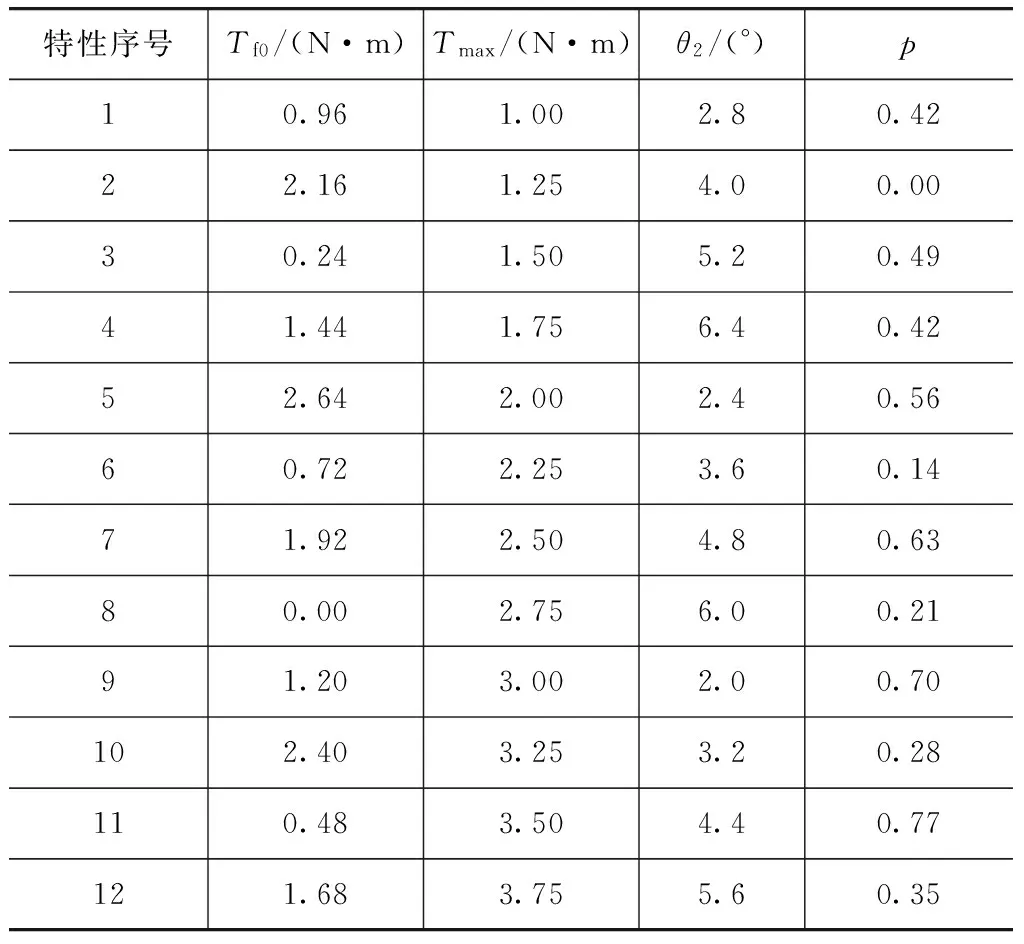
表2 可调参数的取值
2 主观评价和客观评价试验
2.1 主观评价试验
主观评价试验由20名有1年以上的高速驾驶经验并熟悉主观评价项目的驾驶员进行。20名驾驶员均为20~30岁的男性。主观评价试验时,驾驶员在基座固定的驾驶模拟器上按照设计的道路进行模拟驾驶,并对12个力特性进行主观评价。主观评价以问卷的形式进行。
主观评价问卷由6个主观评价项目组成:包括5个分评价项目和1个综合评价项目,见表3。每个评价项目的具体评价方法与文献[9]中一致,这里不再重述。
2.2 客观评价试验
客观评价试验按照ISO 13674—1摇摆输入试验[10]和ISO 13674—2过渡试验[11]的要求进行。为保证客观评价试验中的转角输入尽可能满足ISO标准的要求,同时降低对评价人员的操作要求,客观评价试验在仿真环境中离线进行。仿真环境中的车辆模型与驾驶模拟器中的车辆模型相同。在试验过程中同时记录转向盘转角、转向力矩和侧向加速度信号。通过转向盘转角-转向力矩,侧向加速度-转向力矩的关系图提取15个客观评价指标[9],见表4。客观评价指标的选取以ISO标准中与转向力特性相关的客观评价指标为基础,同时增加了部分指标以期能够涵盖整个中间位置转向区域的特性。
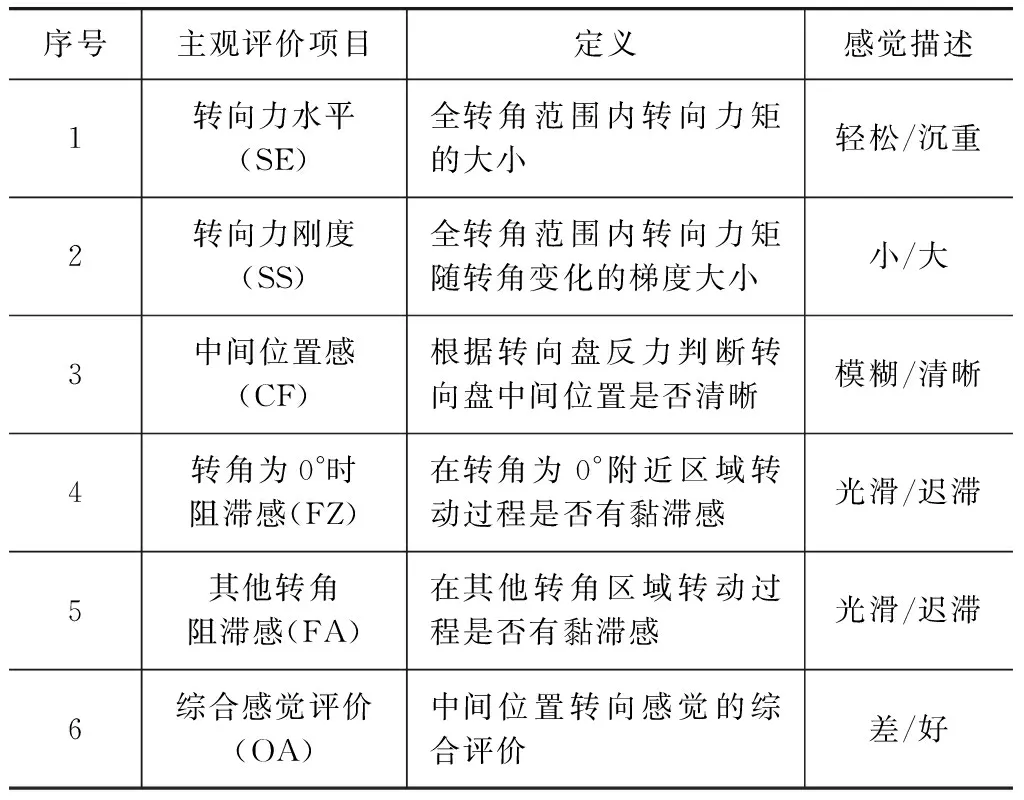
表3 主观评价项目
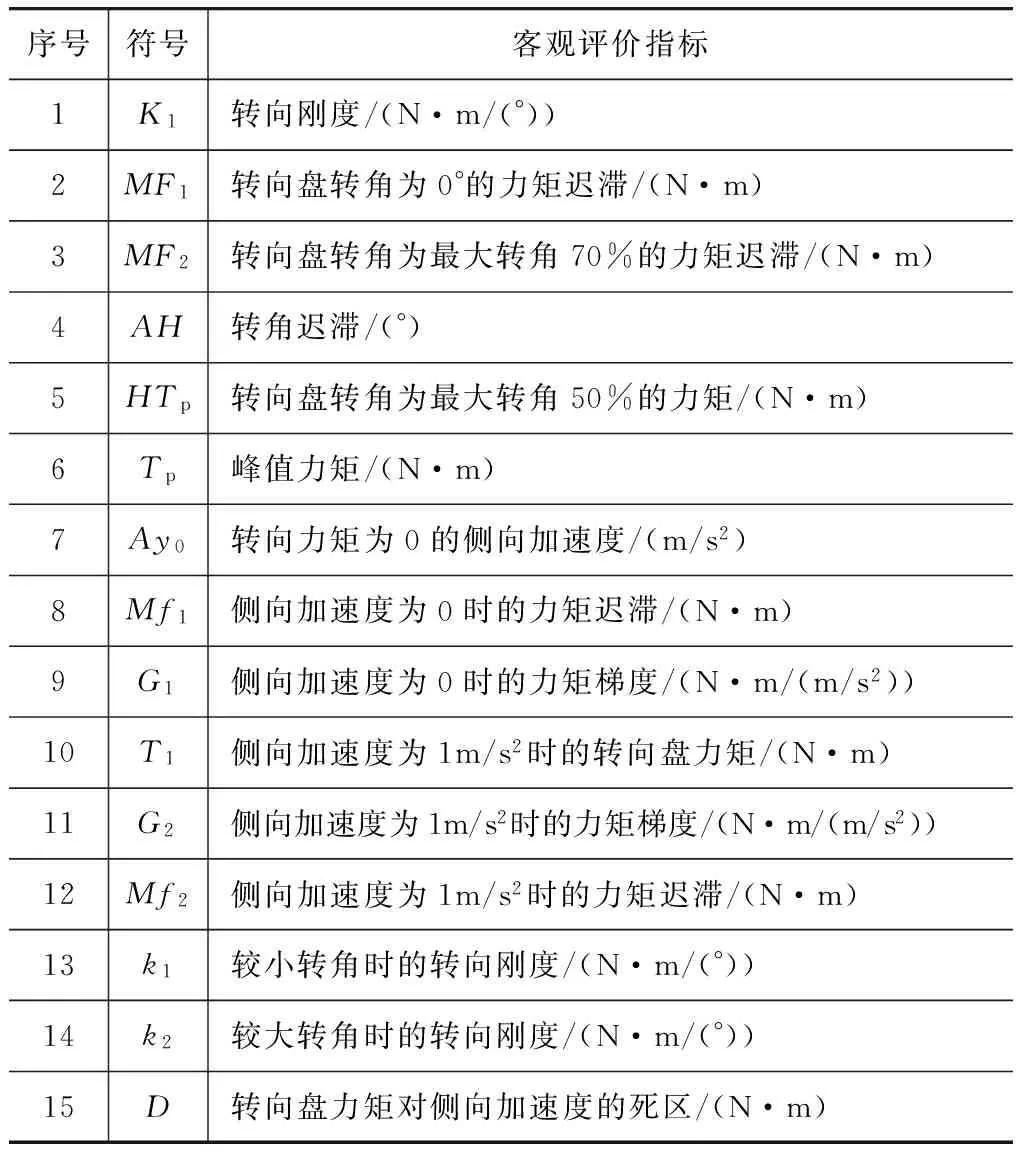
表4 客观评价指标
3 主客观评价相关性分析
首先,介绍主观评价数据的处理方法。然后应用多元线性回归方法对主客观评价相关性进行分析。最后对相关性的可靠性进行验证。
3.1 主观评价数据处理
因为主观评价结果存在一定的离散性,为得到可靠的回归结果,在进行回归分析前须对主观评价试验数据进行预处理。处理前,先做如下假设:所有评价人员对每个特性的每个评价项目的评分平均值为该评价项目评分的真值。基于该假设对主观评价结果的数据处理分为4步。
第1步:针对每个评价项目,如果某一驾驶员的打分与所有驾驶员打分的平均值的Pearson相关系数太小,说明该驾驶员的打分与平均值(真值)的打分趋势相差很大,即该驾驶员的评价结果不可靠,则该驾驶员的评价结果将被剔除。
以“转向力水平”为例计算如下。

(1)
式中Xip为第p个驾驶员对第i个特性的评分(p=1,2,…,20)。

(2)
(3) 将Rp值小于0.8的驾驶员分值剔除。针对“转向力水平”共剔除“c”名驾驶员的打分。
第2步:在第1步的基础上,针对每个特性每个评价项目,如果某一驾驶员的打分与平均值的分差太大,该驾驶员的评分也将剔除。
以“转向力水平”为例计算如下。

(3)
式中Xiq为第q名驾驶员对第i个特性的打分(q=1,2,…,20-c)。

(4)
经过第1、第2步后,除综合感觉评价外,针对每个评价项目所剔除的驾驶员序号如表5所示。因为综合感觉评价项目较难评价,驾驶员的评价结果离散性非常大,经过第1、第2步后仅有5名驾驶员的得分得以保留。为保证后续分析的可靠性,将不对综合感觉评价项目进行相关性分析。同时,通过表5可以看出,针对这5个评价项目,剔除的驾驶员数量均在5个或以下,说明大部分驾驶员的评分与平均值很接近,也证明了一开始的假设是合理的。

表5 剔除的驾驶员序号
第3步:在第1、第2步的基础上,通过肖维勒准则[12]对剩余驾驶员评分中的异常值进行剔除。根据肖维勒准则,在±Zc·σ范围之外的分值将作为异常值进行剔除。其中,σ为标准差,Zc根据表6来选取,表6中的n表示样本数量即针对每个评价项目所保留的驾驶员数量。

表6 Zc的取值

3.2 主客观评价相关性分析
3.2.1 多元线性回归分析主客观评价相关性
应用多元线性回归方法分析主观评价项目与客观评价指标的相关性的方法在文献[9]中已进行详细阐述,在这里不再细述。表7为通过多元线性回归对主观评价项目和客观评价指标进行相关性分析的结果。
3.2.2 相关性的验证
为验证建立的相关性的可靠性,应用均匀试验设计方法重新分布了8组力特性。这8组力特性的4个设计参数的取值范围和最初的12组转向力特性的设计参数的取值范围一致。同时,对这8组转向力特性分别进行了主观评价和客观评价试验。通过客观评价试验提取相应的客观评价指标,并代入到建立的回归模型中便可以得到主观评价结果的预测值。通过对比预测值与实际评分值的误差对建立的相关性的可靠性进行验证。
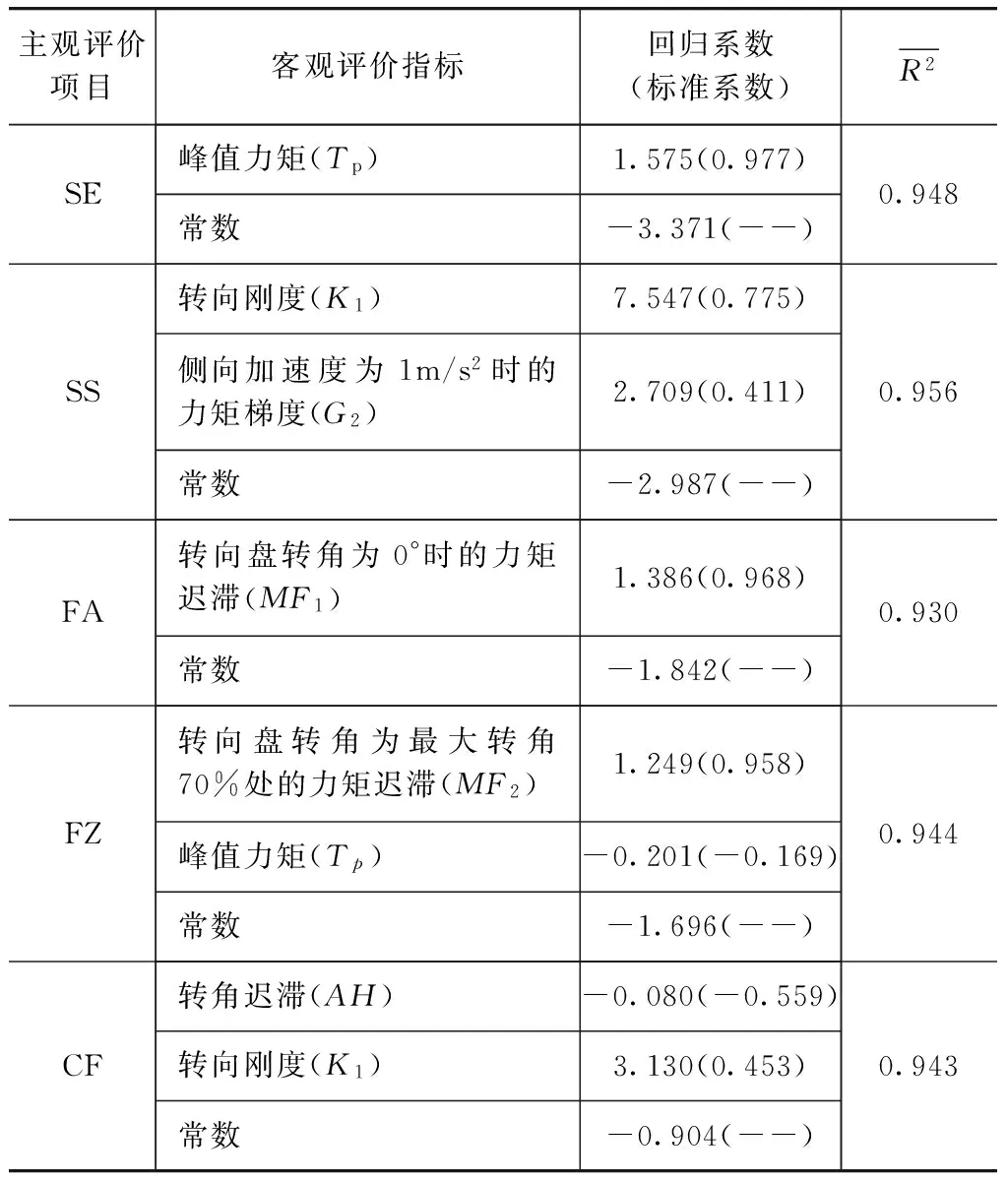
表7 多元线性回归结果
表8为通过多元线性回归模型对主观评价结果进行预测的误差统计。针对每个评价项目,其中最大相对误差是8组力特性的预测值与实际评价值的差值的最大值与打分标尺的范围9分[9]的百分比。平均相对误差是8组力特性的预测值与实际评价值的差值的平均值与打分标尺的范围9分的百分比。
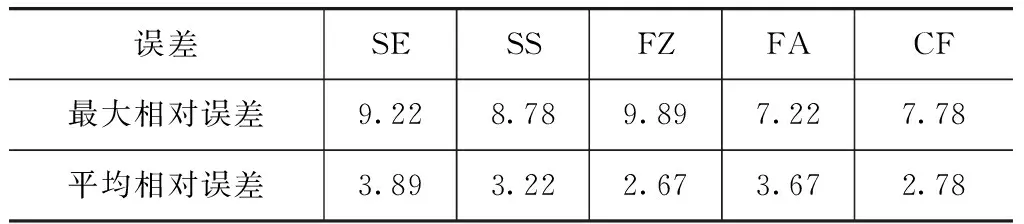
表8 多元线性回归模型预测结果误差统计 %
从表8中可以看出,通过多元线性回归模型对8组新的特性的主观评价结果进行预测时的平均相对误差<4%,说明该模型能够准确地预测主观评价结果,验证了所建立的相关性的可靠性。
4 关键客观评价指标的理想值
从建立的回归模型中,可以得知影响主观评价结果的主要客观评价指标,即回归模型中的解释变量。定义这些解释变量对应的客观评价指标为关键客观评价指标。通过设定期望的主观评价得分为优化目标,则基于主观评价项目与客观评价指标之间的相关性,应用非线性规划的方法便可以求得关键客观评价指标的理想值。
SE=1.575Tp-3.371
(5)
SS=7.547K1+2.709G2-2.987
(6)
FA=1.386MF1-1.842
(7)
FZ=1.249MF2-0.201Tp-1.696
(8)
CF=-0.08AH+3.13K1-0.904
(9)
例如,优化目标设为使式(10)中的G取得最小值,即使得5个评价项目的评分接近于0分(表示性能最好)[9]。
G=|SE|+|SS|+|FA|+|FZ|+|CF|
(10)
式(5)~式(9)与客观评价指标之间的几何约束作为约束条件,应用非线性规划的方法可求得回归方程中客观评价指标的理想取值,见表9。根据实际工程需要设定不同的优化目标,应用上述方法可得到相应客观评价指标的理想取值。通过该方法能够有效指导转向系统的设计和开发。
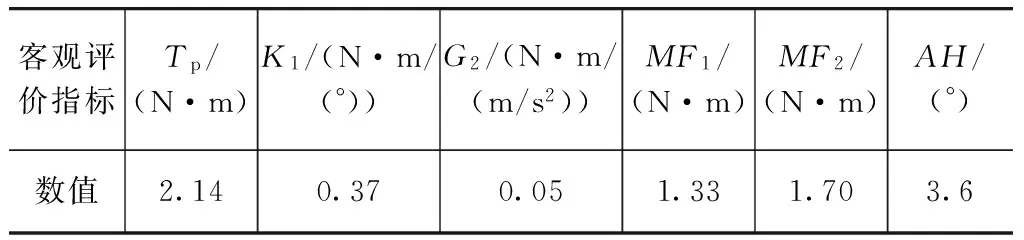
表9 关键客观评价指标的理想取值
5 结论
基于线控转向平台探讨了建立中间位置转向力特性的主客观评价相关性的方法。通过多元线性回归对主客观评价的相关性进行了分析。所建立的回归模型对主观评价进行预测的平均相对误差<4%,能够实现对主观评价结果的可靠预测。最后基于建立的多元线性回归模型,求取了关键客观评价指标的理想值。通过建立主客观评价相关性,并基于相关性求取关键客观评价指标理想取值的方法可以有效指导转向系统的设计和开发。
因为本次试验是在底座不可动的驾驶模拟器上进行的,在后续的研究工作中还须在实车或者与实车相近的底座可动的驾驶模拟器上对上述方法进行验证。
[1] Crolla D A, Chen D C. Vehicle Handling Behavior: Subjective V. Objective Comparisons[C]. FISITA World Automotive Congress, Paris,1998.
[2] Crolla D A, King R P, Ash H. Subjective and Objective Assessment of Vehicle Handling Performance[C]. FISITA World Automotive Congress, Seoul,2000.
[3] King R P, Crolla D A, Ash H. Identification of Subjective-Objective Vehicle Handling Links Using Neural Networks for the Foresight Vehicle[C]. SAE World Congress, Detroit,2002.
[4] Harrer M, Pfeffer P E, Johnston D N. Steering Feel-Objective Assessment of Passenger Cars-Analysis of Steering Feel and Vehicle Handling[C]. FISITA World Automotive Congress, Yokohama,2006.
[5] Zschocke A K, Albers A. Links Between Subjective and Objective Evaluations Regarding the Steering Character of Automobiles[J]. International Journal of Automotive Technology,2008,9(4):473-481.
[6] Rothhamelm L M, Ijkema J, Drugge L. A Method to Find Correlations Between Steering Feel and Vehicle Handling Properties Using a Moving Base Driving Simulator[J]. Vehicle System Dynamics,2011,49(12):1837-1854.
[7] Data S C, Frigerio F. Objective Evaluation of Handling Quality[J]. Proc Instn Mech Engrs, Part D: J Automobile Engineering,2002,216:297-305.
[8] Farrer D G. An Objective Measurement Technique for the Quantification of On-Center Handling Quality[C]. International Congress and Exposition, Detroit,1993.
[9] Zhao X L, Chen H, Gao B L, et al. Correlations Between Subjective and Objective Evaluations of On-center Steering Feel[C]. FISITA World Automotive Congress F2012-G05-008,2012.
[10] International Standard ISO 13674-1: Road Vehicles-Test Method for the Quantification of On-Centre Handling-Part 1: Weave Test[S]. First ed. Switzerland,2003.
[11] International Standard ISO 13674-2: Road Vehicles - Test Method for the Quantification of On-Centre Handling-Part 2: Transition Test[S]. First ed. Switzerland,2006.
[12] Taylor J R. An Introduction to Error Analysis: The Study of Uncertainties in Physical Measurements[M]. Sausalito, CA: University Science Books,1997:166-170.
A Study on the Correlation Between Subjective and ObjectiveEvaluations for On-center Steering Force Characteristics
Dang Jianmin1,2, Chen Hui1,2, Zhao Xianglei1,2, Lou Liming3& Nakano Shirou3
1.SchoolofAutomotiveStudies,TongjiUniversity,Shanghai201804; 2.CleanEnergyAutomotiveEngineeringCenter,TongjiUniversity,Shanghai201804; 3.ResearchandDevelopmentCenter,JTEKTCorporation,JapanNara
The correlations between subjective and objective evaluations of on-center steering force characteristics are studied in this paper. Firstly based on steering by wire system, a steering force characteristics model with adjustable parameters is built for on-center steering, and with uniform experimental design technique, 12 different on-center steering force characteristics are analyzed, then on which a subjective evaluation is performed by evaluators on driving simulator. Meanwhile, an objective evaluation is also carried out by off-line simulation according to the relevant international standards of ISO. Then the correlation between subjective evaluation items and objective evaluation indicators is analyzed by applying multivariate linear regression method. The results show that the average relative error of subjective ratings predicted by the correlation established is less than 4%. Finally, the ideal values of key objective indicators are obtained based on the multivariate linear regression model built. The method proposed provides an effective guide to the development of steering system.
on-center steering; subjective evaluation; objective evaluation; correlations; multivariate linear regression
*同济大学汽车学院-捷太格特汽车主动安全技术联合实验室资助。
原稿收到日期为2013年12月13日,修改稿收到日期为2014年2月20日。
