机电无级传动混合动力驱动系统的模式切换协调控制*
2015-04-12罗玉涛王敷玟
罗玉涛,王敷玟
1.华南理工大学机械与汽车工程学院,广州 510640; 2.广东省汽车工程重点实验室,广州 510640)
2015094
机电无级传动混合动力驱动系统的模式切换协调控制*
罗玉涛1,2,王敷玟1,2
1.华南理工大学机械与汽车工程学院,广州 510640; 2.广东省汽车工程重点实验室,广州 510640)
开发了一种由双转子电机和双排行星齿轮机构组成的机电无级传动混合动力驱动系统,建立了整车动力学模型,提出了“转矩分配+发动机转矩估计+电动机转矩补偿+补偿系数修正”的协调控制策略;最后分别对由纯电动模式切换到混合驱动模式的定工况和全工况进行仿真,结果表明:所提出的控制策略能有效地抑制驱动模式切换过程中因不同动力源动态特性差异所造成的整车纵向冲击,提高了汽车行驶平顺性。
机电无级传动;转矩分配策略;协调控制;模式切换;冲击度
前言
混合动力电动汽车具有不同的动力源,可根据行车需要选择动力源的不同组合,使车辆运行于最佳工作模式,以提高车辆的各项性能。然而,由于发动机和电动机的动态响应特性不同,使混合动力电动汽车在工作模式切换时,动力输出不能及时响应驾驶员的需求,控制不当会造成传动系统的动力中断和转矩波动,影响整车的动力性、平顺性和乘坐舒适性。
针对这一问题,文献[1]~文献[3]中通过采用特有的动力耦合机构直接实现对发动机转矩的反馈,利用电动机转矩对发动机转矩进行动态补偿,有效地解决了动态协调问题。文献[4]和文献[5]中将最优控制算法应用到HEV驱动模式切换中,采用二次型优化求解发动机和电动机在模式切换过程中不同阶段的目标转矩,较好地实现了HEV动力平顺切换。文献[6]和文献[7]中将混合动力驱动系统划分为不同子域并设计了相应的控制器,探讨了混杂系统的切换控制问题。文献[8]~文献[10]中对单轴并联式混合动力汽车动力切换过程中的离合器接合压力进行了闭环控制,提出离合器接合过程的动态转矩控制策略,提高了动力切换的平顺性。
为解决混合动力汽车在驱动过程中模式切换时可能导致驾驶性能变差的问题,本文中基于一种由对转双转子电机和双行星排组成的机电无级传动混合动力驱动系统,提出了双转子电机补偿转矩修正的动态协调控制策略,利用双转子电机快速补偿发动机在工作模式切换过程中的转矩不足,有效地减小了整车纵向冲击度,提高了整车的驾驶性能。
1 系统结构
如图1所示,本系统中采用具有2个转子的对转双转子电机和具有3个输入输出端子的双排行星齿轮减速机构为主要构件,动力耦合器前端输入轴与发动机相连,通过定轴齿轮副把动力传至前排行星机构的太阳轮S1,前排行星机构的齿圈R1与双转子电机外转子Ro相连,通过前排行星齿轮机构把两个不同动力源的动力耦合至行星架P1,实现转速转矩的初次耦合;后排行星齿轮机构的太阳轮S2与行星架C1固接,行星架C2固定,齿圈R2与双转子电机内转子相连,初次耦合的转速转矩通过后排行星齿轮机构传至齿圈R2,最后与内转子实现二次转矩耦合,通过输出轴把汇集的动力传至驱动轮,驱动汽车行驶。当汽车运行在不同工况时,车辆控制系统通过对B1、B2制动器、双转子电机和发动机进行控制,便可实现不同工作模式时不同动力的分配与汇合;此外,该机电无级传动变速系统(electronic continuously variable transmission, ECVT)兼顾机械端口和电气端口,在进行能量转换与耦合分离时无需离合器与额外的起动电动机,具备在较宽速比范围内实现无级变速传动、使发动机在变负载情况下均能运行于最佳燃油经济线上,在减少燃油消耗、提升效率、优化发动机性能等方面具有很大优势[11]。表1为混合动力系统的主要部件及参数。

表1 混合动力系统的主要部件及参数
2 整车建模
2.1 发动机模型
稳态情况下,发动机输出转矩是其节气门开度和转速的函数,本文中利用发动机试验数据,采用多项式拟合的方法建立发动机模型,同时考虑发动机在起动、变速等情况下,油门开度变化迅速,发动机达到稳态须经历一个动态过程,故将发动机模型简化为2阶传递函数来估计发动机的动态转矩输出响应[12]:
(1)
式中:Teng_act为发动机实际输出转矩,N·m;ξ为2阶系统阻尼比;ωn为发动机固有频率,rad/s;Teng_desired为发动机的目标转矩,N·m。
2.2 双转子电机模型
本文中采用的新型对转双转子电机,利用作用力和反作用力原理,将传统的定子也作为转子,与原来的电机转子做反向运动,具有与永磁同步电机相同的电气特性[13],根据试验获得双转子电机的效率特性模型,可把对转双转子电机的转矩输出特性采用1阶惯性环节进行动态修正[7]:
(2)
式中:Tmi、Tmo分别为双转子电机内、外转子实际输出转矩,N·m;τm为电机时间常数,s;η为电子节气门开度;Tmr为电动机请求转矩,N·m。
2.3 制动器模型
由系统结构分析可知,系统具有多种工作模式的关键是制动器的工作状态的切换,在给制动器发出接合和分离信号后,制动器并不能马上完成所需动作,具有一定时间的延迟,故将制动器的控制信号采用了1阶延迟模块来模拟制动器的动作[12]:
(3)
式中:Tbrake为制动器制动转矩,N·m;τ为制动及分离信号的时间常数,s。
2.4 动力耦合器动力学建模
对于该机电无级混合动力驱动系统,由于总成系统中引入了双排2自由度的行星齿轮机构的动力耦合装置,具有多个旋转部件,鉴于模拟杠杆法可将这个旋转运动系统模拟人们熟悉的直线运动系统,在处理复杂多自由度旋转系统时具有很大优势,因此以模拟杠杆法快速建立系统的数学模型[14-15],并做如下假设:(1)只考虑汽车纵向动力学;(2)忽略系统的能量损失;(3)忽略系统阻尼、刚度。
图2为动力耦合机构模拟杠杆图,采用隔离法建立模型,分别以发动机、定轴齿轮副、制动器B1和前排太阳轮为整体得式(4),以前排齿圈、外转子为研究整体得式(5),以内转子和行星齿圈为研究整体得式(6),根据行星齿轮机构特性得式(7)。

(4)
(5)
(6)
(7)
依次建立驾驶员模型、动力电池模型、主减速器(差速器)模型、轮胎和车辆纵向动力学模型,限于篇幅和研究的重点,本文中未予列出。
3 控制策略
3.1 转矩分配策略
转矩分配策略属于混合动力系统的能量管理范畴,主要包括3部分:根据驾驶员模型和电池模型及转矩计算模块确定总需求转矩;根据控制策略确定工作模式的切换条件;根据控制策略确定各工作模式下的目标转矩。由于基于规则的转矩分配策略可靠性好、实用性强,本文中根据双转子电动机和发动机稳态万有特性图,以发动机和双转子电动机转矩为直接控制对象,根据驾驶员模型计算所需的转矩,采用最佳的转矩分配规则使控制系统运行。针对系统的结构和转矩控制策略,可得到系统的主要工作模式,如表2所示。

表2 混合动力系统工作模式
注:本文中双转子电机为内绕组、外永磁体结构,外转子并不真实发电,但当其相对内转子转动时,内转子会产生电流,为方便区分,把此种情况定义为外转子工作于发电状态。
3.2 动态协调控制策略
协调控制中涉及两个被控对象,基于发动机和双转子电机的动态响应特性的较大差异,采用“转矩分配+发动机转矩估计+电动机转矩补偿+补偿系数修正”的方法,即根据总需求转矩和转矩分配策略确定发动机和电动机的目标转矩(式(8)),然后利用发动机模型对其进行动态转矩估计,再用双转子电机的转矩对发动机在动态变化过程中的实际转矩与目标转矩的差值进行补偿(式(9)),由于策略中发动机转矩是由发动机模型直接估算,发动机试验及模型参数确定中可能存在偏差,导致发动机实际转矩的估计存在偏差,直接补偿可能会影响控制策略的精确度,因此最后采用补偿修正系数对双转子电机补偿转矩进行修正(式(10)),当满足一定条件时,动态协调控制结束。
Tmr=Tt_req-Teng_desired
(8)
TSwitch_mr=(Teng_desired-Teng_act)+Tmr
(9)
TSwitch_mr=k(Teng_desired-Teng_act)+Tmr
(10)
式中:Tt_req为总需求转矩,N·m;TSwitch_mr为模式切换时补偿控制后的双转子电机目标转矩,N·m;k为补偿修正系数。其流程图如图3所示。
由机电无级传动混合动力驱动系统结构和表2知,系统通过双排行星齿轮机构把对转双转子电机和发动机动力进行耦合,有多种工作模式,其中,系统由纯电动模式③切换至混合驱动H2模式⑦时,切换过程中不仅需要发动机起动,制动器B1分离,制动器B2接合等复杂过程,且系统传动特性产生跃变,较大冲击对混合动力系统寿命和整车平顺性产生不利影响,此外,在切换过程中必须瞬间经过混合驱动模式⑥,因此本文中以纯电动模式③切换至混合驱动H2模式⑦为例作动态协调控制策略算例研究,将此过程统称为纯电动切换至混合驱动。
模式切换前,系统运行于纯电动模式③,外转子输出转矩经前排行星齿轮机构耦合至行星架,再经第2排行星齿轮机构传至后排齿圈,最后与内转子实现转矩耦合,由式(6)有
(11)
又根据行星齿轮及结构特性有
Tc1=-(1+k1)Tmo=(1+k1)Tmi
(12)
故输出转矩为
(3)在防治校园欺凌的教育方面学校的管理要有针对性,注重对学生个体的关注。调查中发现,学生的性别、年级、等因素都会导致学生对欺凌行为的认知差异。农村初中生中大部分为留守学生,父母在情感陪伴上的缺失使他们更易出现心理失衡,因此学校要督促教师积极关心学生的心理健康,及时了解学生的情绪变化、家庭情况等,做好家校沟通。
(13)
同理可得模式切换后,在混合驱动H2模式⑦下,混合动力系统总输出转矩与发动机转矩和双转子电机转矩的关系为
(14)
模式切换过程中,制动器B2接合,制动器B1分离,混合动力系统总输出转矩与发动机转矩和双转子电机转矩的关系同式(14),根据动态协调控制策略,动态补偿后,双转子电机的目标转矩为
TSwitch_mr=kk0(1+k1)k2(Teng_desired-Teng_act)+Tmr
(15)
4 仿真及分析
评价汽车驾驶性能的方法有主观评价法和客观评价法,为了客观地量化车辆的驾驶性能,以整车加速度的变化率,即冲击度作为评价指标,利用MATLAB/Simulink/Stateflow建立整车车辆动力学前向仿真模型,建立转矩分配策略和动态协调控制策略,对未考虑和考虑模式切换协调控制的由纯电动驱动切换到混合驱动的整车协调控制策略进行仿真。
4.1 定工况仿真
在定工况中,混合动力电动汽车的工作模式与发动机和双转子电机的目标转矩皆预先设定,无须转矩管理策略对两者转矩进行分配,主要用来考察混合动力驱动系统转矩输出的情况和动态协调控制策略在特定工况下的控制效果。以纯电动向混合动力切换过程为例,以动力耦合机构输出端总的需求转矩维持在715.5N·m为目标,对动力源进行转矩分配。
图4为定工况未加动态协调控制各变量的变化。如图所示,在第5s左右,混合动力驱动系统的工作模式发生切换,切换前后发动机的目标转矩由0变为118.6N·m,双转子电机目标转矩由150变为238.5N·m,但由于发动机对节气门信号响应滞后及燃油系统存在超调,使发动机转矩响应滞后且超调,而双转子电机具有较好的动态响应特性基本能够及时响应转矩请求,导致动力耦合机构输出总转矩在模式切换瞬间产生较大波动,进而造成一个超过10m/s3的冲击度(-11.715m/s3)。此外,在模式切换过程中,由于动力耦合机构输出总转矩无法满足目标总转矩,造成混合动力驱动系统动力性瞬间下降,对驾驶性能产生不利影响。
图5为定工况施加动态协调控制各变量的变化。如图所示,采用动态协调控制算法后,利用双转子电机及时补偿发动机的转矩,使动力耦合器实际总输出转矩的波动、车身加速度和整车冲击度(-0.987 2m/s3)明显减小,保证了状态切换过程中动力传动的平稳性,可见,在该机电无级混合动力驱动系统模式切换时,所提出的动态控制策略能较好地保证混合动力汽车的动力性要求,同时保证了系统动力传递的平稳性,降低了传动系统的冲击,提高了驾驶性能。
4.2 全工况仿真
全工况仿真是指根据工况需要,驾驶员模块根据目标车速和实际车速的差值产生踏板行程参数后,随踏板行程、车速和蓄电池荷电状态等参数的变化确定总变速器输出轴的目标转矩,再根据确定的转矩控制策略,确定混合动力系统的运行模式和发动机、双转子电机目标转速转矩。全工况仿真中的控制算法,既要减小发动机和电动机转矩之和的波动及控制冲击度的大小,还要保证发动机与双转子电机的转矩之和符合驾驶员对目标转矩的需求,以满足车辆动力学和燃油经济性。
图6为全工况时的输入目标车速,是全工况仿真的工况输入,结合所开发的车型,以美国城市循环工况UDDS为全工况目标输入车速。
图7~图9为全工况时,未施加动态协调控制,系统由纯电动起动切换到混合驱动过程中相关参数的变化。由图可见,随着车速的增加,为减小蓄电池的能量消耗并使发动机工作于高效区,模式切换发生在23.25s,在模式切换瞬间产生一个很大的冲击度(-41.944m/s3),一方面因汽车加速度需求瞬间减小,另一方面由于发动机未能及时响应目标转矩,大大超过了乘客感觉舒服的冲击度上限值(德国制定的冲击度上限值为10m/s3),将严重影响车辆的驾驶性能和乘坐舒适性。
图10~图12为全工况时,施加动态协调控制,系统由纯电动起动切换到混合驱动过程中相关参数的变化。由图可见,系统模式切换的时间有所增加(0.1s),尽管在模式切换时,系统的加速度目标值产生较大变化,但双转子电机转矩能有效补充发动机转矩,使整车最大冲击度明显地减小(-9.470 3m/s3),在合理范围之内。
综上所述,无论是定工况还是全工况,系统在施加动态协调控制后,最大转矩偏差和最大冲击度都明显减小,如表3所示。
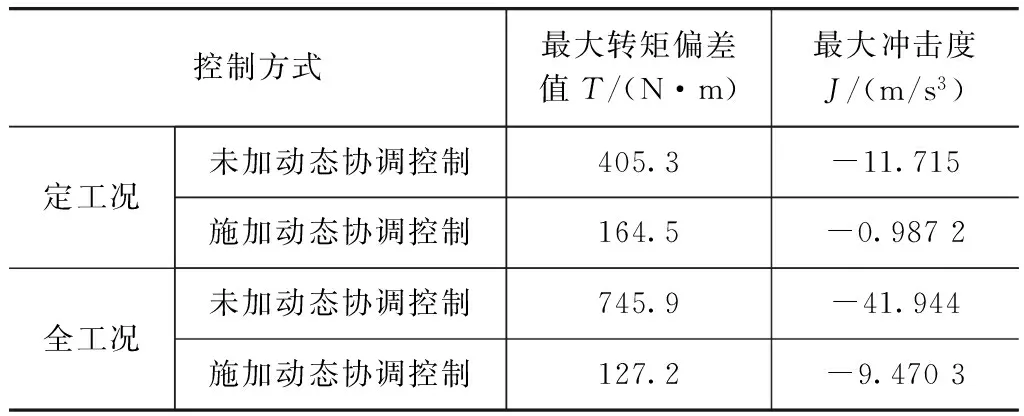
表3 模式切换仿真结果对比
5 结论
基于一种新型机电无级传动混合动力驱动系统,针对由于发动机与电动机动态响应的较大差异而引起的转矩大幅波动,提出了典型工作模式切换过程中的转矩协调控制策略,并进行了定工况和全工况仿真对比验证,定工况和全工况仿真结果均表
明,在施加动态协调控制策略后整车冲击度明显降低,行驶平顺性明显提高,证明了提出的动态协调控制策略能有效地解决并联混合动力汽车在工作模式切换过程中转矩大幅波动的问题。
[1] Akihiro K, Tetsuya A, Shoichi S. Driving Force Control of a Parallel-Series Hybrid System[J]. JSAE Review,1999,20(3):337-341.
[2] Yoshioka. Noise and Vibration Reduction Technology in Hybrid Vehicle Development[C]. SAE Paper 2001-01-1415.
[3] Dimitrios Rizoulis, Jeffrey Burl, John Beard. Control Strategies for a Series-Parallel Hybrid Electric Vehicle[C]. SAE Paper 2001-01-1354.
[4] Guzzella L, Sciarretta A. Vehicle Propulsion System[M]. Berlin Heidelberg: Springer,2007.
[5] 闫晓磊,钟勇,钟志华.HEV系统动力平顺性切换最优控制研究[J].汽车工程,2008,30(4):28-30.
[6] Korowais K, Westervelt E, Rizzoni G. Toward the Systematic Design of Controllers for Smooth Hybrid Electric Vehicle Mode Changes[C]. The American Automatic Control Council. Proceedings of the 2007 American Control Conference, New York, AACC,2007:2985-2990.
[7] 赵治国,何宁,朱阳,等.四轮驱动混合动力轿车驱动模式切换控制[J].机械工程学报,2011,47(4):100-109.
[8] Kim Sangjoon, Park Joonyoun. Transient Control Strategy of Hybrid Electric Vehicle During Mode Change[C]. SAE Paper 2009-01-0228.
[9] 倪成群,张幽彤,赵强,等.混合动力离合器结合过程的动态转矩控制策略[J].机械工程学报,2013,49(4):115-121.
[10] 戴一凡,罗禹贡,李克强,等.单电机强混合动力电动汽车辆的动态协调控制[J].汽车工程,2011,33(12):1008-1012.
[11] Chau K T, Chan C C. Emerging Energy-efficient Technologies for Hybrid Electric Vehicles[J]. Proceeding of IEEE,2007,95(4):821-835.
[12] Fazal Urrahman Syed. Modeling and Control Methods for Improving Drivability Power Management[D]. Detroit: Wayne State University,2008.
[13] 邓志君,罗玉涛,周斯加,等.新型车用对转双转子电机的研究[J].电气传动,2007,37(7):10-13.
[14] 于永涛.混联式混合动力车辆优化设计与控制[D].长春:吉林大学,2010.
[15] 方伟荣,黄宗益,李新华.行星变速器的有效工具[J].上海汽车,2003,4(1):1-4.
Coordinated Control for the Mode Switching of HEV Powertrainwith Electro-mechanical Variable Transmission
Luo Yutao1,2& Wang Fuwen1,2
1.CollegeofMechanicalandAutomotiveEngineering,SouthChinaUniversityofTechnology,Guangzhou510640;2.GuangdongProvincialKeyLabofAutomotive,Guangzhou510640
An electro-mechanical variable transmission for hybrid power drive system is developed, which consists of a double-rotor motor and a two-row planetary gear set. Then a vehicle dynamics model is build and a coordinated control algorithm of “motor torque compensation and correction after torque pre-distribution and engine torque estimation” is proposed. Finally, simulations on the switching from pure electric mode to hybrid drive mode in two different conditions are performed. The results show that the proposed control strategy can effectively suppress the longitudinal jerk of vehicle caused by the discrepancy between dynamic characteristics of different power sources in the process of drive mode switching, and hence improve the ride comfort of vehicle.
electro-mechanical variable transmission; torque distribution strategy; coordinated control; mode switching; jerk
*国家863计划项目(2012AA110702)、教育部新世纪优秀人才计划(NCET-2011-0157)和中央高校基本科研业务费(2013ZM0125)资助。
原稿收到日期为2013年7月10日,修改稿收到日期为2013年9月27日。