基于顶层设计的转向与悬架系统协同控制的研究*
2015-04-12袁朝春江浩斌牛礼民
黄 晨,陈 龙,袁朝春,江浩斌,牛礼民
(1.江苏大学汽车与交通工程学院,镇江 212013; 2.安徽工业大学机械工程学院,马鞍山 243000)
2015197
基于顶层设计的转向与悬架系统协同控制的研究*
黄 晨1,陈 龙1,袁朝春1,江浩斌1,牛礼民2
(1.江苏大学汽车与交通工程学院,镇江 212013; 2.安徽工业大学机械工程学院,马鞍山 243000)
针对汽车复杂工况行驶对操纵稳定性及平顺性的综合要求,提出了一种基于顶层设计的转向与悬架底盘子系统协同控制策略。首先在底盘系统的顶层框架设计与协同机制研究基础上,建立了综合性能控制分配模型,设计了启发式协商算法;接着以某车多体动力学模型为例进行了脉冲路面上角阶跃转向输入复合工况的SIMPACK/Matlab联合仿真,最后进行整车道路试验。仿真和试验结果表明,基于顶层设计的协同控制策略是可行、有效的,综合改善了车辆行驶平顺性和操纵稳定性。
转向;悬架;顶层设计;协同控制
前言
车辆底盘系统由多个子系统组成,包括转向、悬架和驱动与制动等关键子系统。每一个子系统单独控制都会改变车辆系统动力学性能,并且子系统之间存在联系,它们的协同工作需要底盘的集成控制[1-2]。但将每个子系统根据不同的控制目标简单地叠加,无法使车辆综合性能最优。因此,只有将传统的车辆底盘系统智能化、网络化和模块化,才能实现真正意义上的底盘集成控制[3-5]。
随着底盘系统集成控制的不断发展和逐步应用,以往的简单组合和更改参数等方法解决不了众多子系统的集中与分散和协同与管理等科学技术问题[6-9]。虽然一些集中系统往往更容易管理,但是这些系统的可持续性不强,一旦方案失效,其他子系统也会随之失效。因此迫切须要从广度和深度上考虑子系统之间层次布局,加强顶层设计,并且在底层上采用协同控制的思想,解决子系统之间的冲突和矛盾,提高集成效率,实现整车综合性能的提升。
因此,本文中通过分析半主动悬架和电动助力转向两个子系统内主要结构、控制参数和各子系统之间不同性能指标的相互制约、影响和协调机理,基于顶层设计和协同控制理论,自上而下将车辆底盘集成控制系统设计为顶层子系统和转向、悬架和轮胎3个底层子系统,并建立子系统之间模糊关系型合同网协同控制模型,使子系统之间优势互补,降低或消除相互干扰,最大程度减小因驾驶意图变化和外界环境影响等引起车身姿态的变化,综合改善行驶平顺性和操纵稳定性,实现半主动悬架与电动助力转向的良好匹配和协同控制,为底盘智能化集成控制提供新的理论和方法。
1 集成控制器的建立
基于顶层设计的车辆底盘协同控制系统的模型和结构如图1所示。在该系统中有驾驶意图和车辆状态等信息输入,输出则是半主动悬架(SAS)提供的控制电流ISAS和电动助力转向(EPS)提供的控制电流IEPS,并且具有TYPE,EPS和SAS 3个底层子系统和1个SYS顶层子系统。
1.1 底盘系统的顶层设计框架与协同机制
以往的分层控制将控制体系分为上层和下层2部分,而本文中从协同控制角度将车辆底盘集成控制系统分为顶层、底层和中间协同层3个功能区,但在模块设计中体现顶层设计的思想将顶层和中间层集中建模。根据不同的功能分层,将基于顶层设计的车辆底盘协同控制系统的控制过程分为顶层设计、协同优化和自主控制3个阶段,相关功能与详细结构如图2所示。
1.2 底盘系统的顶层设计工况规则
顶层子系统SYS具有最高决策权,负责整个底盘系统的集成领域,以性能最优为目标,完成协同控制策略的制定,其输入是外部车辆状态与下层各子系统的反馈信息,其输出是子系统相关参数。
引入模糊权值,给出关系权值的隶属度集合R,用<负大,负小,零,正小,正大>来表示子系统之间的冲突和协同关系以及它们之间相互影响程度的大小。
设计如下规则,其中参考车速v、前轮转角δf和横摆角速度ω的值,根据整车状态估计模型实时地确定子系统模糊权值的比重。
工况1:当车辆横摆角速度ω=0时,协同系统以提高汽车行驶平顺性为目标,控制车身垂向加速度和俯仰角速度,遵循以舒适性导向的分配原则,即SAS子系统模糊权值为正大,EPS子系统模糊权值为0。
工况2:当车辆横摆角速度ω与期望横摆角速度vδf/L之差er大于阈值er′时,半主动悬架开始工作,同时适当增减助力,遵循以安全性导向的分配原则,即SAS子系统和EPS子系统模糊权值皆为正小,相互协同;如果车辆处在过度转向中,SYS子系统通过转向盘转角动态实时识别,并且向EPS子系统请求配合,提高车辆操稳性指标,控制转向盘转向力大小,以减小过度转向的趋势,否则EPS子系统不介入工作。
工况3:当车辆横摆角速度ω与期望横摆角速度vδf/L接近,差值不超过阈值er′时,增加助力,以提高车辆的机动性,使转向轻便,同时抑制车身侧倾,使前轮垂向载荷波动量减小,遵循以舒适性和安全性兼顾的融合导向的分配原则,即EPS子系统模糊权值为正大,SAS子系统模糊权值为正小。
1.3 底盘系统综合性能控制分配模型与协商策略
顶层子系统SYS在任务分解与完成过程中,根据所设计的工况将系统任务划分为W={b1,b2,b3},需要3个子系统A={aEPS,aSAS,aTYRE}协同完成。完成任务bi(i=1,2,3)需要的能力表示为
{Cb1,Cb2,Cb3}T
其中Cb1={Fz,F1,F2,F3,F4}
Cb2={Tm,θ,Fy,Fz,F1,F2,F3,F4}
Cb3={Tm,Fy,Fz,F1,F2,F3,F4}
aEPS具有的能力:CEPS={Tm,θ}
aSAS具有的能力:CSAS={F1,F2,F3,F4}
aTYRE具有的能力:CTYRE={Fy,Fz,p,T}
则基于子系统协同的任务分配模型为
(1)
s.t.fd≤fd′
任务2: min(|ω-ω′|)
(2)
k2TYRE(Fz+Fy)))
(3)
s.t.fd≤fd′
k3TYRE(Fz+Fy)))

在优化过程中采用启发式协商算法(图3):
(1) 计算Vj(xj,yj);
(2) 若Vj(xj,yj)≤Vj-1(xj-1,yj-1),则协商失败,若Vj(xj,yj)>Vj-1(xj-1,yj-1),则协商成功,返回协商结果(xj,yj);
(3) 计算让步幅度,Rs=(Vj(xj,yj)-Vj-1(xj-1,yj-1))/N,生成Vj+1=Vj(xj,yj)-Rs,并返回给aEPS和aSAS求解新一轮提议(xj+1,yj+1);
(4) 输出最优协同的组合解。
2 仿真研究
应用多体动力学理论建立汽车模型可提高建模质量,缩短设计周期,因此本文中采用基于相同理论已建立的SIMPACK整车模型和实车参数[10],进行联合仿真。
为了验证上述控制策略的有效性,设计了特殊的复合工况进行数值仿真试验,并与相同工况下传统分层控制的系统性能进行比较。
复合工况采用路面脉冲输入和转向盘角阶跃输入的复合仿真,来分析所设计的协同控制系统对于车辆操稳性和平顺性综合性能的改善程度。其过程为以100km/h(27m/s)车速进入前轮转角8°的环形路面,在行驶时间约6s左右环形道路1/4时,遇到障碍物高度为5cm的脉冲激励,如图4所示,仿真结果见图5和表1。
从图5(a)、图5(b)和表1中可看出,当车辆受到图4所示的脉冲路面不平激励后,协同控制使车身垂向加速度和横摆角速度振动幅值都得到较为明显的改善,而传统分层控制作用下的控制效果降低幅度较小,甚至部分指标出现恶化。这是因为在传统分层控制体系中,只单独考虑某项控制性能指标,未考虑整体框架中的综合性能,及不同控制器控制力的相互影响。车身侧倾和俯仰运动的情况类似,由图5(c)和图5(d)可见,传统分层控制无法改变由于轮胎垂向载荷变化对车辆横摆力矩和侧向力产生的影响,使在角阶跃转向输入6s左右,车辆都具有2°左右的稳态侧倾角,而后脉冲路面不平激励对于侧倾运动产生了较大的影响。协同控制则通过不同指标间的不断协商进行了弥补。由图5(d)和图5(e)可见,协同控制时,车身侧偏角的波动很快趋于稳定,说明路面脉冲不平度激励基本不影响车辆的操纵性能,从而也反映了控制策略的优越性,提高了整车综合性能。
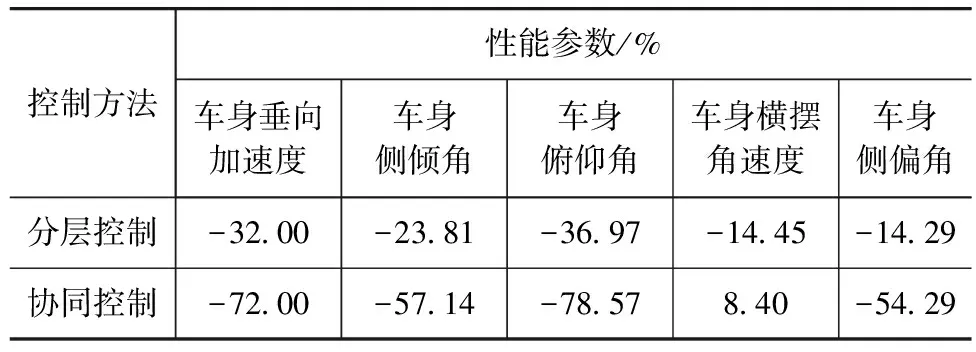
表1 单脉冲路面角阶跃输入工况相对单独控制峰值性能比较
3 实车试验
利用现有快速控制原型工具—dSPACE 1401/1505/1507型MicroAutoBox,搭建与文献[10]中一致的实车道路试验系统。
在联合仿真中采用了脉冲路面上角阶跃转向输入工况的仿真,来分析所建立的协同控制体系对于车辆操稳性和平顺性的改善程度。但由于实际场地和条件的限制,不能完全按照联合仿真中的复合工况,只能近似采用单侧脉冲路面输入行驶试验,来评价汽车驶过单凸块时冲击对乘员和货物的影响程度。试验时,汽车以40km/h的稳定车速通过干燥平坦清洁的混凝土路面试验场地,任意方向上的坡度不大于2%,道路设有脉冲减速块,高度2cm,其右端与路边约为50cm宽,如图6所示。结果如图7和表2所示。
从图7和表2中可看出,当车辆受到脉冲路面不平激励后,快速原型试验和联合仿真的车身垂向加速度、车身侧倾角和车身俯仰角振动幅值都得到较为明显的改善,虽然快速原型试验结果较联合仿真峰值波动较大,但幅度基本一致,说明协同控制策略是有效的,综合性能得到提高。
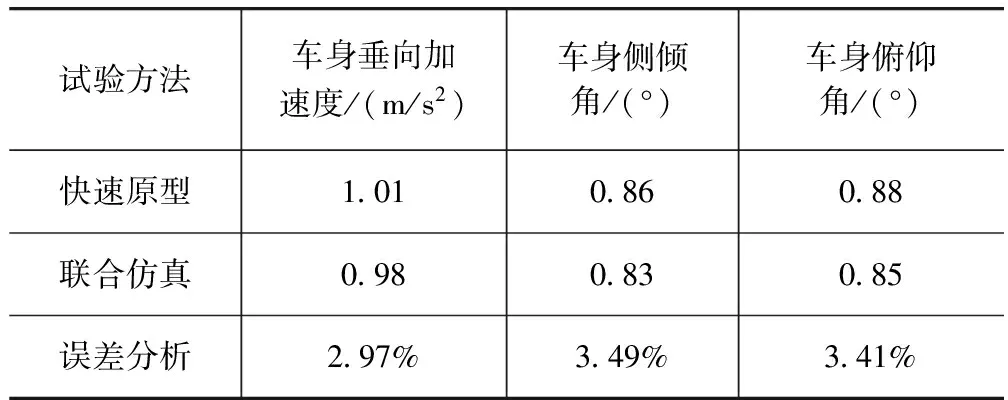
表2 单脉冲路面输入工况不同试验方法峰值性能比较
4 结论
仿真和实车道路试验结果表明,基于顶层设计的转向和悬架底盘子系统协同控制效果明显,最大程度上减少了驾驶意图变化和外界环境影响等引起的车身姿态变化,综合改善了行驶平顺性和操纵稳定性,实现了底盘复杂大系统全局优化。
[1] Li D, Du S, Yu F. Integrated Vehicle Chassis Control Based on Direct Yaw Moment, Active Steering and Active Stabilizer[J]. Vehicle System Dynamics,2008,46(S1):341-351.
[2] Zhao Wanzhong, Shi Guobiao, Lin Yi, et al. Tracking Performance of Electric Power Steering System Based on the Mixed H2/H∞Strategy[J]. Chinese Journal of Mechanical Engineering,2011,24(4):584-590.
[3] Liu Jia, Liu Zhongxin, Chen Zengqiang. Coordinative Control of Multi-agent Systems Using Distributed Nonlinear Output Regulation[J]. Nonlinear Dynamics,2012,67(3):1871-1881.
[4] Chang Shunchang, Lin Haiping. Study on Controlling Chaos of Permanent Magnet Synchronous Motor in Electric Vehicles[J]. International Journal of Vehicle Design,2012,58(2):387-398.
[5] Zareh S H, Sarrafan A, Khayyat A A A, et al. Intelligent Semi-active Vibration Control of Eleven Degrees of Freedom Suspension System Using Magneto-rheo Logical Dampers[J]. Journal of Mechanical Science and Technology,2012,26(2):323-334.
[6] Li Wenwen, Raskin Robert, Goodchild Michael F. Semantic Similarity Measurement Based on Knowledge Mining: an Artificial Neural Net Approach[J]. International Journal of Geographical Information Science,2012,26(8):1415-1435.
[7] 姜炜,余卓平,张立军.汽车底盘集成控制综述[J].汽车工程,2007,29(5):420-425.
[8] 高晓然,余卓平,张立军.集成地盘控制系统的控制框架研究[J].汽车工程,2007,29(1):21-26.
[9] 陈励志.先进的底盘控制系统的发展趋势[J].汽车工程,2002,24(5):455-458.
[10] 黄晨,陈龙,袁朝春,等.半主动悬架系统的混合模糊控制[J].汽车工程,2014,36(8):999-1003,1018.
A Study on Steering / Suspension Cooperative Control Based on Top-layer Design
Huang Chen1, Chen Long1, Yuan Zhaochun1, Jiang Haobin1& Niu Limin2
1.SchoolofAutomobileandTrafficEngineering,JiangsuUniversity,Zhenjiang212013; 2.CollegeofMechanicalEngineering,AnhuiUniversityofTechnology,Ma’anshan243000
For meeting the requirements on the handling stability and ride comfort of vehicle in complex conditions, a steering / suspension cooperative control strategy is proposed based on top-layer design. Firstly, on the basis of the top layer framework design and cooperation mechanism investigation of chassis system, a comprehensive performance control allocation model is built with a heuristic negotiation algorithm devised. Then with the multi-body kinetics model for a vehicle as example, a SIMPACK/Matlab co-simulation is conducted with a compound condition of pulse pavement excitation and steering angle step input. Finally real vehicle road tests are performed. The results of both simulation and tests show that the cooperative control strategy based on top-layer design is feasible and effective, concurrently improving the ride comfort and handling stability of vehicle.
steering; suspension; top-layer design; cooperative control
*国家自然科学基金(51305167,51275002)和江苏省高校自然科学研究面上项目(15KJB580004)资助。
原稿收到日期为2015年7月2日,修改稿收到日期为2015年8月12日。
