雷达测量数据对红外测量数据的修正方法
2015-04-03禄晓飞詹武平蔡新田
禄晓飞,詹武平,蔡新田
雷达测量数据对红外测量数据的修正方法
禄晓飞,詹武平,蔡新田
(酒泉卫星发射中心,甘肃 酒泉 732750)
给出了雷达测量数据修正红外测量数据的方法,指出首先需要对雷达测量数据进行误差修正,再通过最小二乘方法融合多台雷达测量数据,通过坐标系转换计算飞行目标在光学测量坐标系中的位置,得到光学设备的测量方位角和俯仰角,最后计算目标在红外图像上的脱靶量。
红外测量;雷达测量;数据修正
0 引言
雷达是靶场测量的重要测量设备,受气候条件影响较小,可以跟踪测量目标的外弹道参数及目标特性数据。在靶场试验中,利用测量的目标特性数据,可以识别不同的目标。利用雷达识别后的目标分类结果,对红外跟踪测量目标进行分类识别。
1 多台雷达测量数据交汇计算目标弹道
1.1 雷达测量数据误差修正
靶场雷达测量元素包含斜距、俯仰角及方位角等参数,由于这些测量序列含有测量误差,需要根据雷达标校参数将测量数据进行误差修正,这些误差包括零值误差、时间误差、方位轴与俯仰轴不正交误差、大气折射误差等,雷达测量系统误差修正计算公式如下:
¢=(1-12)-0-11D-Da
¢=-0-(m+e)sec-11sin(-m)tg-12tg-13sec-14sec-15sin(-a)-16Dasecc
¢=-0-11cos(-m)-12-13cos-
14sin(-e)-15De-Da(1)
式中:、、分别是原始测量的斜距、俯仰角及方位角;¢、¢、¢分别为经过修正后的参数。
方位角修正公式中:0是方位角零值;m是天线座下倾最大方位角;11是方位角修正天线座水平度;12是方位轴与俯仰轴的垂直度;13是光机轴平行度;14是方位角修正光电轴平行度;15是方位角编码器非线性度;a是方位编码器偏心角,16=1000a×180/p,a是方位角定向灵敏度;Da是方位角误差电压。
俯仰角修正公式中:0是俯仰角零值;11是俯仰角修正天线座水平度;12是俯仰角修正光电轴平行度;13是天线重力变形误差;14是俯仰角编码器非线性度;15=1000e×180/p,e是俯仰角定向灵敏度,De是俯仰角误差电压,Da是仰角大气折射误差。
上述的误差修正公式是比较全面的一般情况,对不同的设备考虑不同的误差修正项。
1.2 雷达数据综合处理
雷达误差修正后,雷达测量序列还残留一定的随机误差,对多台雷达测量数据进行综合处理,可提高目标的坐标精度,通常采用最小二乘估计综合弹道参数。解算过程中,根据测量误差(又称为均方根差RMS)和观测方程可计算弹道参数的误差协方差阵。
多站交汇最小二乘迭代综合求解的弹道位置计算公式如下:


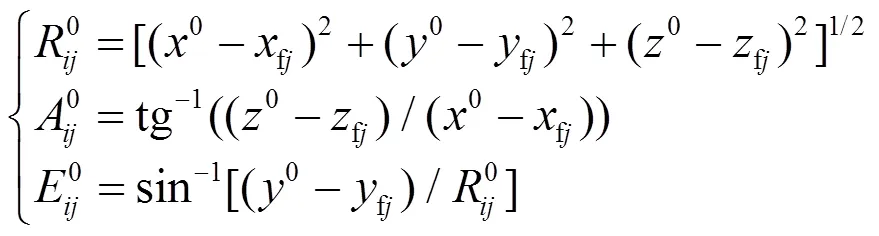
式中:0、0、0为目标的发射坐标系坐标;fj、fj、fj为测站原点在发射系中的站址坐标;D0=[(0-fj)2+(0-fj)2]1/2;R0、E0、A0为经过角坐标转换后的外弹道测量数据:
其中,ε(i, j)为矿石某区域(i, j)应变,α(i, j)为矿石某区域(i, j)的热膨胀系数,Tn(i, j)为矿石某区域(i, j)末温(与比热容相关),T1(i, j)为矿石某区域(i, j)初始温度,σ(i, j)为矿石某区域(i, j)热应力,E(i, j)为矿石某区域杨氏模量,v(i, j)为矿石某区域(i, j)的泊松比。
式中:(=1,…,)表示测站编号(表示实际参加求解的测站数);(=1,…,)表示数据点序号(表示求解时间段内的数据总点数)。
D为测量值残差,为观测误差协方差矩阵:

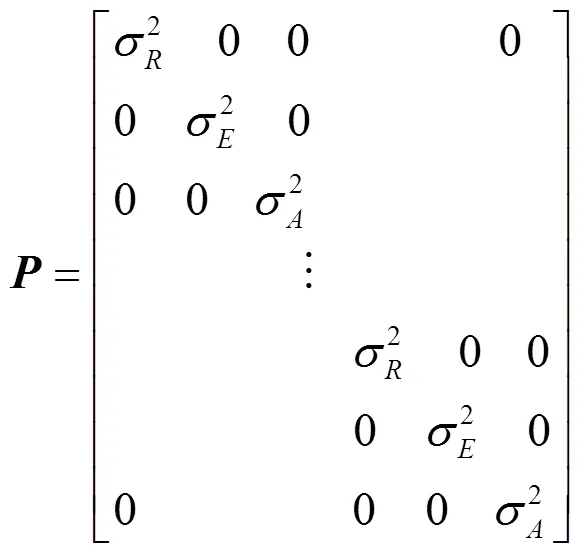
式中:、、为测站测量元素测量精度的均方差,对于未参加处理的设备,则令矩阵中该设备测量精度的均方差为0。
协方差矩阵及精度估算可由下式得到:
式中:、、为估算的坐标精度,、x、、、、为估算的坐标相关系数。
2 坐标系转换
通过雷达交汇得到飞行目标在发射坐标系的坐标后,还需将其转换到光学设备的测量坐标系,计算观测方向。
令、、分别为光学设备点位的大地经度、大地纬度、大地高,和为垂线偏差;¢、¢、¢分别为发射点位的大地经度、大地纬度、大地高,¢和¢为垂线偏差;T为天文射击方位角,=arcsin[sin(-)sin]。
2.1 计算光学设备点位和发射点位在地心直角坐标系的坐标
根据光学设备点位和发射点位的大地坐标,可计算其在地心直角坐标系中的坐标:


2.2 把交汇坐标转换到测量坐标系
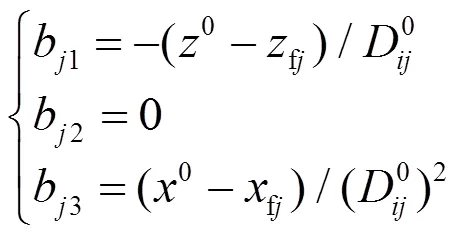
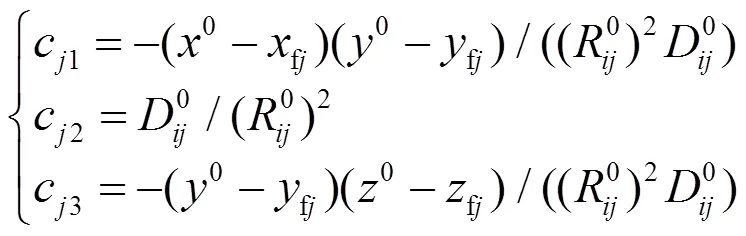
记多站雷达交汇坐标为,测量坐标系坐标为c,转换公式为:

这里,
2.3 把交汇坐标转换到测量坐标系
雷达测量目标在光学测量坐标系中的观测俯仰角和方位角为:
1)当c2+c2=0时,即目标在光学设备正上方时,=p/2,无意义。


2.4 光学图像复原
上节中得到目标在光学测量坐标系中到观测量(,)可以近似看作一个真实值,也就是经过误差修正后得到的俯仰角与方位角。而光学测量设备在测量过程中不可避免会存在测量误差,包括系统误差和随机误差。因此在将雷达测量数据修正光学测量数据时,需要将雷达测量数据调整到光学测量设备相同的状态,即将前文得到的观测量(,)加入光学测量设备的系统误差。假设光学测量设备的系统误差为(D,D),则修正后到观测量为:
(D,D)由光学测量设备拍摄方位标得到,其值为方位标测量值与理论值之差。
3 雷达测量数据修正光学数据
从光学设备测量原理来看,目标的测量角度由两部分构成:测量设备主光轴指向角度和脱靶量合成角度。假设相同时刻光学测量设备主光轴指向角度为(0,0),从3.4节计算得到目标的观测角度为(¢,¢),则脱靶量为:
脱靶量和目标偏离图像中心距离的关系为:

式中:、为目标在图像上偏离中心的值;为焦距。为计算方便,可把式(14)中第二项忽略,

这里还需要光学设备的像元尺寸来计算像素位置。
4 结论
本文给出了雷达测量数据修正红外测量数据的方法,指出首先需要对雷达测量数据进行误差修正,再通过最小二乘方法融合多台雷达测量数据,通过坐标系转换计算飞行目标在光学测量坐标系中的位置,得到光学设备的测量方位角和俯仰角,最后计算目标的脱靶量并显示。
[1] 刘利生. 外测数据事后处理[M]. 北京: 国防工业出版社, 2000.
[2] 王正明. 弹道跟踪数据的校准与评估[M]. 长沙: 国防科技大学出版社,1999.
[3] 何友, 修建娟, 张晶炜. 雷达数据处理及应用[M]. 北京: 电子工业出版社, 2009.
[4] 刘利生. 外弹道测量数据处理[M]. 北京: 国防工业出版社, 2012.
[5] 张玉莲. 靶场光学测量数据处理方法[M]. 北京: 国防科工委司令部教育训练部, 1988.
[6] 赖德雄, 张云飞. 飞行器红外隐身性能评估方法研究[J]. 红外技术, 2014, 36(5): 398-403.
[7] 王涛, 王祥. 红外导弹抗干扰能力多纬度评估方法. 红外技术, 2014, 36(7): 573-576.
[8] 高文, 朱明, 贺柏根, 等. 目标跟踪技术综述. 中国光学, 2014, 7(3): 365-375.
Method of Modifying Infrared Data by Using Radar Data
LU Xiao-fei,ZHAN Wu-ping,CAI Xin-tian
(,732750,)
This paper proposed one method for modifying infrared data by using radar data. Firstly the data measured by radar are revised through error correction. Secondly the data of many radars are fused by least square method, and the precise position is calculated. Thirdly the information of position is projected into the space of infrared optical system, and the angles of elevation and azimuth are computed. Finally the miss distance of target measured by radars is calculated and shown on the infrared image.
infrared measurement,radar measurement,data revision
TN216
A
1001-8891(2015)06-0472-03
2014-10-01;
2014-12-04.
禄晓飞(1981-),男,工程师,博士,主要从事红外物理研究。E-mail:Luxf08@163.com。
