远程实验操作平台设计与实现
2015-04-01唐立军唐付桥贺慧勇
唐立军, 宾 峰, 邓 敏, 唐付桥, 贺慧勇
(长沙理工大学 物理与电子科学学院, 湖南 长沙 410114)
·仪器设备研制与开发·
远程实验操作平台设计与实现
唐立军, 宾 峰, 邓 敏, 唐付桥, 贺慧勇
(长沙理工大学 物理与电子科学学院, 湖南 长沙 410114)

以迈克尔逊干涉仪为研究对象,设计了一个由自动测量模块、操作模块、监视模块、交互模块和控制模块构成的远程实验操作平台。自动测量模块采用OV7725摄像头摄像分析干涉条纹的方法实现条纹的自动计数;操作模块通过步进电机和细分驱动器实现微调手轮的远程操作;监视模块通过网络摄像头实现条纹“冒出”或者“缩进”现象的远程监视;交互模块通过W5200以太网芯片、LCD触摸屏和QT界面实现远程实验操作人员和实验现场指导人员的远程交互;控制模块采用K60高速处理器实现其他4个模块的控制。实验结果表明:利用该平台可顺利地远程完成迈克尔逊干涉仪实验的全部环节,并且干涉条纹监视效果清晰,测得的He-Ne激光波长结果误差最大不超过1.3/‰。
远程实验; 远程操作; 迈克尔逊干涉仪; 远程教学
0 引 言
随着网络技术以及仪器仪表技术的发展,远程开放实验平台的构建和研究发展较快[1],国内外针对远程实验室进行网络实验管理和虚拟仿真实验的平台开发较多[2-4],但针对实验仪器设备进行远程监控和操作的远程实验室平台研究较少[5-7]。本文以迈克尔逊干涉仪为实验研究对象,探索具有远程实验监视、控制、测量、交互等功能的远程实验操作平台,为远程开放实验教学和远程实验操作提供新思路和新手段,也可为远程实验室的建设提供一种新的实验和教学模式。
1 操作平台框架
操作平台之所以选择迈克尔逊干涉仪作为实验研究对象,因为该实验作为经典物理实验[8],一般高校都有,而且该实验具有一般实验具有的典型特点,既有较强的可操作性:需要转动微调手轮调节光程差,又有远程监视和数据处理性能:需监视该实验的干涉圆环的冒出和湮没现象,且干涉条纹可通过图像处理的方法实现自动计数[9]等。
操作平台由操作模块、自动测量模块、交互模块、控制模块和监视模块五部分构成,其框架如图1所示。
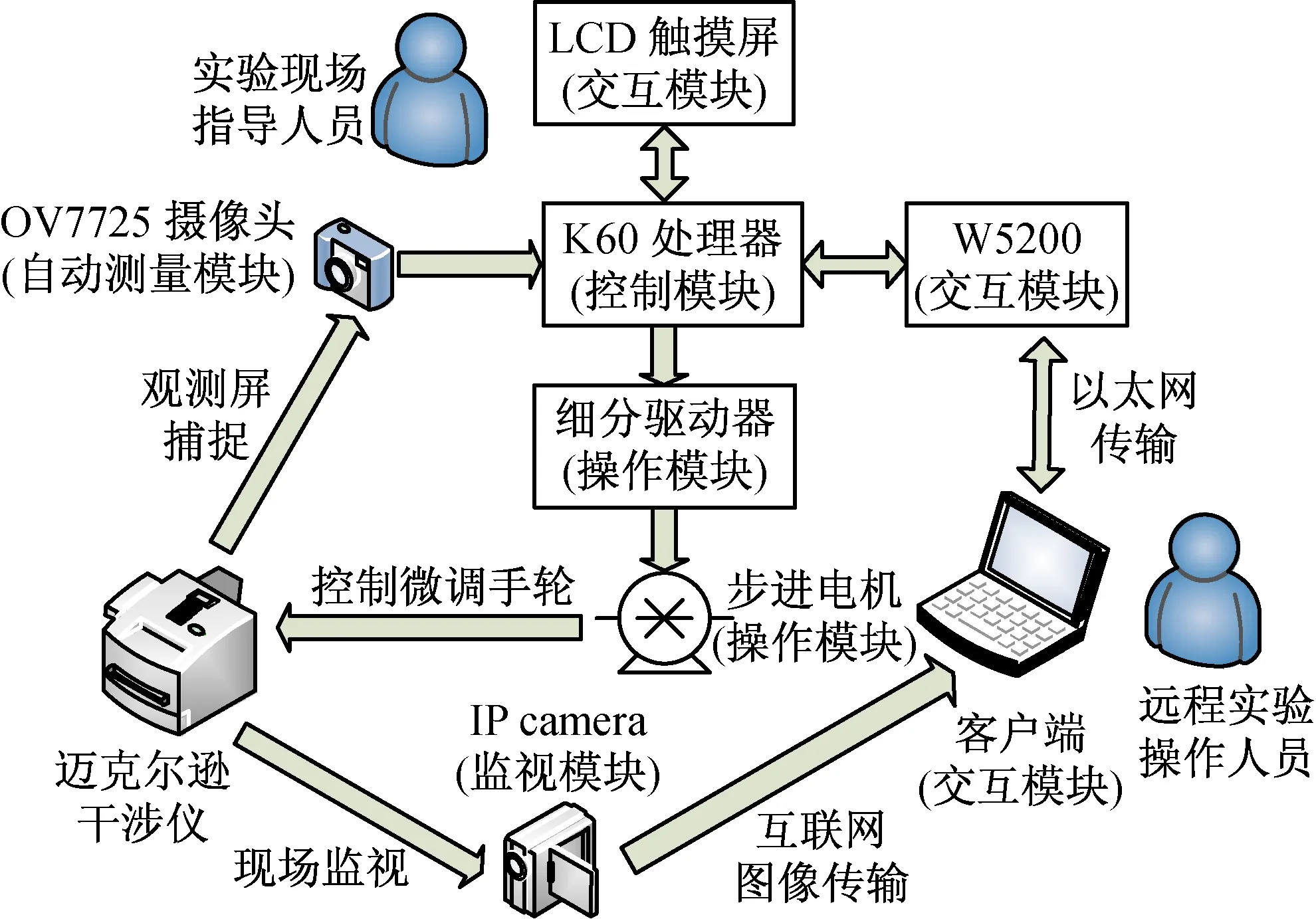
图1 操作平台框架图
2 操作平台设计
2.1 操作模块
操作模块采用细分驱动器驱动步进电机的方式,可避免直接驱动时电机振动大、分辨率不高的缺点。
电机选用型号为42BYGHM809的二相四线步进电机,其步矩角为0.9°,静力矩为4 200 g·cm,转动惯量68 g·cm2,定位力矩220 g·cm,该型号电机具有噪声小、力矩大等优点。
细分驱动器由光电隔离芯片6N137和步进电机驱动芯片THB6128构成。光电隔离芯片使用共阳极接法,控制器引脚使用开漏(或开集)输出;光电隔离芯片将驱动芯片与控制器之间进行电气隔离,避免步进电机对控制器的干扰。驱动芯片具有8档细分设定,最小步距角可达128细分;调节驱动芯片的FDT引脚的电压可以设定不同的衰减模式,衰减模式分为慢衰减、混合式衰减和快衰减;电流设定有连续电流和分段电流两种方式,连续电流大小可以通过用万用表在VREF引脚上测得,分段电流大小可以通过设置拨码开关实现8段电流档位设置。根据负载大小合理地设置细分数、衰减模式和电流大小,实现电机的精确、稳定运行[10]。细分驱动器的接口见图2,使能信号决定步进电机能否转动,方向信号控制步进电机是正转还是反转,脉冲信号则驱动步进电机转动一个细分步距角。

2.2 自动测量模块
自动测量模块用来测量迈克尔逊干涉环湮没或者冒出的个数。有的文献利用光敏二极管感应干涉环亮度变化转化为电信号[11],但该方案具有抗干扰能力差、误差大的缺点。本平台采用信噪比和微光灵敏度高、图像采集速度快的OV7725摄像头传感器捕捉干涉条纹的方案,该方案具体包括摄像头的驱动电路、驱动程序设计和干涉条纹的自动计数算法研究。
2.2.1 OV7725摄像头驱动电路
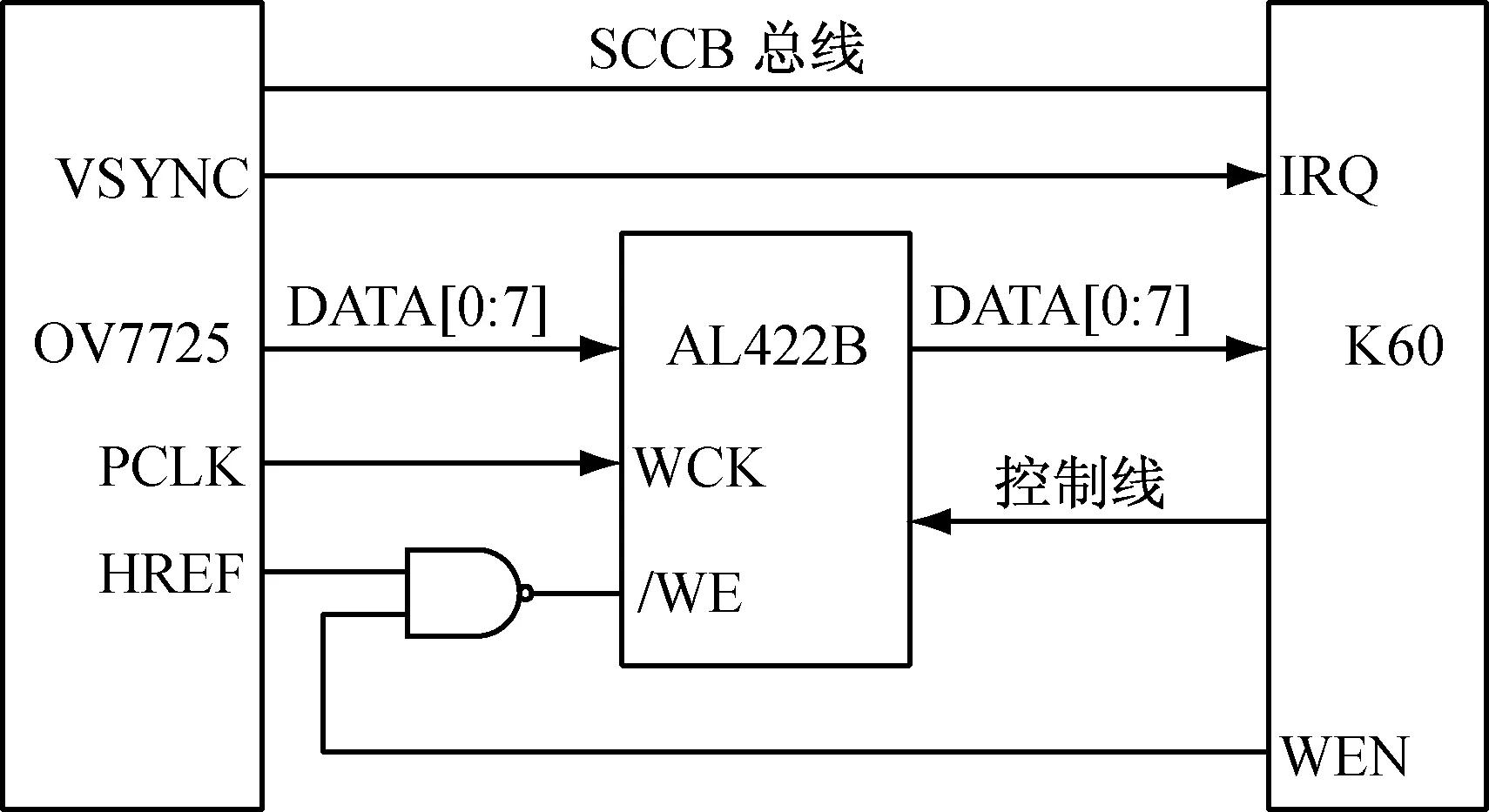
OV7725主要提供了D0~D7 八个数字像素输出信号,VSYNC场同步信号,HREF行同步信号,PCLK像素输出时钟信号,SCCB总线寄存器配置信号,通过SCCB总线可配置摄像头的图像数据格式、分辨率、自动曝光控制、自动增益控制、自动白平衡以及饱和度、亮度、对比度等参数[12]。
OV7725接口如图3所示,为了匹配OV7725像素输出速率和控制器的采集速率,OV7725和控制器之间增加了一个FIFO,作为数据的缓存。摄像头分辨率配置为240×320,每个像素用RGB565表示,则整幅图像占用的空间大小为153.6 Kb,FIFO型号采用AL422B,其容量高达384 Kb,容量符合设计要求。
2.2.2 OV7725摄像头驱动程序
OV7725摄像头像素输出时序见图4,根据其时序和硬件接口可设计一幅图像的采集流程见图5。


图像采集流程:开始时,K60一直监测OV7725的场同步信号(即VSYNC引脚),直到检测出场同步信号到来后,便使WEN引脚输出高电平,并在OV7725的行同步信号到来后, FIFO即被写使能;然后FIFO在每个像素输出时钟PCLK的上升沿将OV7725输出的图像数据存储起来;当场同步信号再次到来时,表明上一幅完整的图像数据已经全部被采集到FIFO中,此时再失能FIFO写,并复位读指针后,将FIFO中的数据读到控制器内存中,一幅图像采集完毕。
2.2.3 干涉条纹自动计数
干涉条纹自动计数的方法是通过OV7725摄像头采集干涉条纹图像,然后选取干涉环中心区域的图像数据进行处理,提取RGB565图像数据中的R分量,并与阈值30作比较,得出大于该阈值的图像数据占所选区域的比例;当比例大于某一值时则判定干涉环为处于“冒出”环节,小于某一值时则判定干涉环处于“湮没”环节;分析若干连续的图像后,再判断干涉环变化是否符合“冒出”—“湮没”—“冒出”的过程,如果符合该过程则条纹数加1,算法流程如图6所示。

图6 干涉条纹自动测量算法流程图
2.3 交互模块
2.3.1 远程通信应用电路
为实现远程实验操作人员在任意有互联网的地方均能操作本平台,所以控制模块与客户端需实现Internet通信。本平台采用型号为W5200的以太网芯片,其内部已经集成了10/100M以太网控制器、MAC和TCP/IP协议栈,与MCU的通信采用SPI接口,具有数据传输速率快、编程简单等优点。设计中使用W5200内部的PHY,为了使内部PHY与隔离变压器之间很好地阻抗匹配,需要一个50 Ω(±1%) 的电阻和一个0.1 μF的电容[13],实际应用中使用型号为13F-60FGYDPNW2NL的RJ45网口,其内部集成了网络变压器和2个指示灯,其中一个指示网络链接速度;另一个指示网络链接状态,以太网模块接口如图7所示。

2.3.2 客户端设计
客户端由QT软件编写,移植性强,可很方便地移植于LINUX、Android等操作系统。客户端包括用户登录界面和迈克尔逊干涉仪实验操作界面。只有用户在登录界面通过用户名和密码的认证后,才能进入实验操作界面。操作界面具有角色选择功能,观察者只有对实验现象和实验结果的监视权限,控制者还拥有对远程实验设备的操作权限;客户端可设定干涉条纹数,当操作平台的测量模块检测到冒出或者湮没的干涉环数达到设定的干涉环数时便停止步进电机的转动;客户端可远程控制步进电机的停止/启动、转向和转速;客户端还可显示干涉条纹数和微调手轮移动距离信息以及计算He-Ne波长。
2.3.3 实验现场交互模块设计
实验现场交互模块用来实现实验现场指导人员与控制模块之间的交互。LCD触摸屏的使用具有普遍性和方便的特点,故本平台采用其作为现场交互的工具。LCD触摸屏包括两部分,一部分是LCD显示屏,可作为信息输出设备;另一部分是触摸屏,可作为信息输入设备。显示屏的驱动芯片采用ILI9341,与处理器的连接使用FSMC接口;触摸屏的检测芯片采用TSC2046,与处理器的连接采用SPI接口。
2.3.4 数据安全
数据安全涉及到用户的个人信息安全以及实验数据通信过程中的可靠性。为有效地保障数据的安全,本平台采取了两个措施;① 登录操作时对用户名和密码进行了MD5加密,提高了用户信息的安全性;② 以太网数据传输时采用TCP协议,该协议基于“连接套接字”,可有效地避免数据丢包和数据接收顺序错乱的现象。
2.4 控制模块
控制模块负责对其他4个模块的控制以及数据的采集、处理。
2.4.1 处理器最小系统
控制模块作为操作平台的调度中心,需协调各个模块的工作,并需进行图像的采集、处理,负荷较大,所以控制模块的处理器必须要有足够快的频率和足够大的RAM空间。本平台选用的处理器是飞思卡尔的MK60FX512VLQ15芯片,该芯片的系统频率可超调至275 MHz,适合于快速的图像采集和网络数据传输。由于此芯片具有硬件单精度浮点运算单元,便于图像处理,且有128 K的RAM和512 K的Flash,RAM的大小已经足够存储一幅320×240像素的图像,所以无需外扩存储器,可以减少系统面积。
MK60FX512VLQ15芯片的硬件最小系统包括电源电路、复位电路、晶振电路及JTAG接口电路[14]。电源滤波电路用于改善系统的电磁兼容性,降低电源波动对系统的影响,增强电路工作稳定性,为标识系统通电与否,增加了一个电源指示灯。主芯片时钟使用50 MHz有源晶振,RTC时钟使用32.768 kHz无源晶振,在硬件布线时需要注意晶振附近不能走高频信号,晶振应该尽量靠近晶振输入引脚;K60内部集成了JTAG接口,通过JTAG接口可以实现程序下载和调试功能。
2.4.2 主程序
主程序包括两个任务,一个是对用户信息进行认证、登记、注销的用户管理任务;另一个是对微调手轮进行操作、对干涉条纹进行自动测量以及与远程实验操作人员、实验现场指导人员进行交互的测控任务。在主程序里,首先进行系统初始化,然后进行两个任务的轮流切换。
2.5 监视模块
监视模块用来监视迈克尔逊干涉条纹的冒出和淹没,并将图像传输到远程平台。本平台选用IP Camera,借助其P2P技术突破局域网的限制[15],利用其内置的WiFi功能实现无线传输;通过远程控制IP Camera的云台转动,可调整IP Camera的拍摄视角,实现实验现场的多角度监视;将其自身的IP地址和DDNS动态域名输入到浏览器,实现远程实验视频。
3 实验结果
3.1 干涉条纹的远程监视
IP Camera抓拍观察屏上的干涉条纹,将拍摄到的图像通过互联网传输至远程客户端,从客户端观察到的其中一幅图像见图8。传输的干涉条纹清晰,图像分辨率达720P。
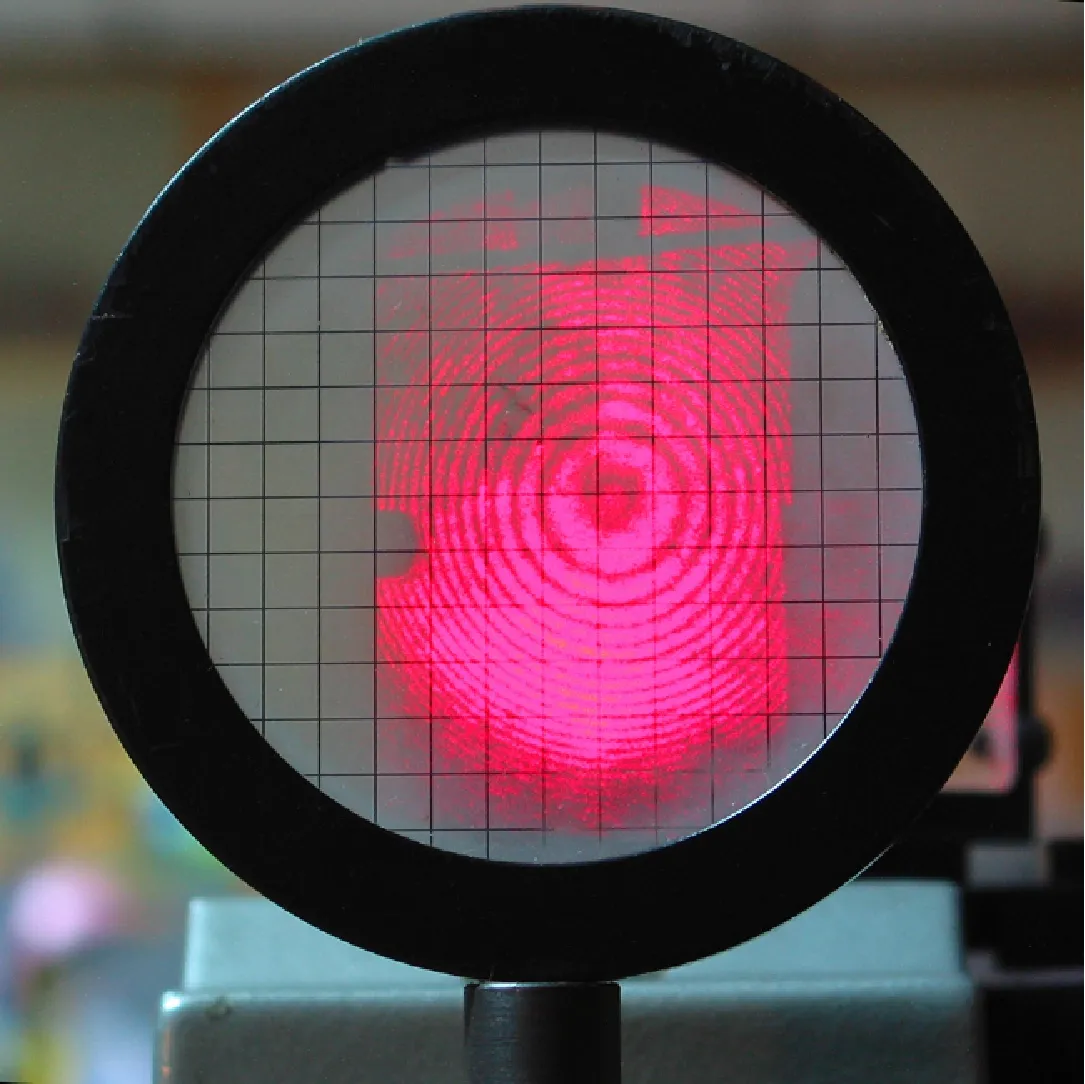
图8 干涉条纹监视结果
3.2 He-Ne激光波长的远程测量
本实验使用步距角为0.9°的步进电机,并进行128细分,微调手轮上单位刻度为100 nm,理论上分辨率为0.195 312 5 nm。表1是He-Ne激光波长测量结果,从表可见,测量结果最大误差不差过1.3‰。
4 结 语
本文以迈克尔逊干涉实验为实例,探索了远程实验操作平台的相关技术,设计实现了一个远程实验操作平台,实验结果表明,该平台操作方便,远程实验现象清晰,实验结果精确,为远程实验操作和实验教学提供了技术支持。
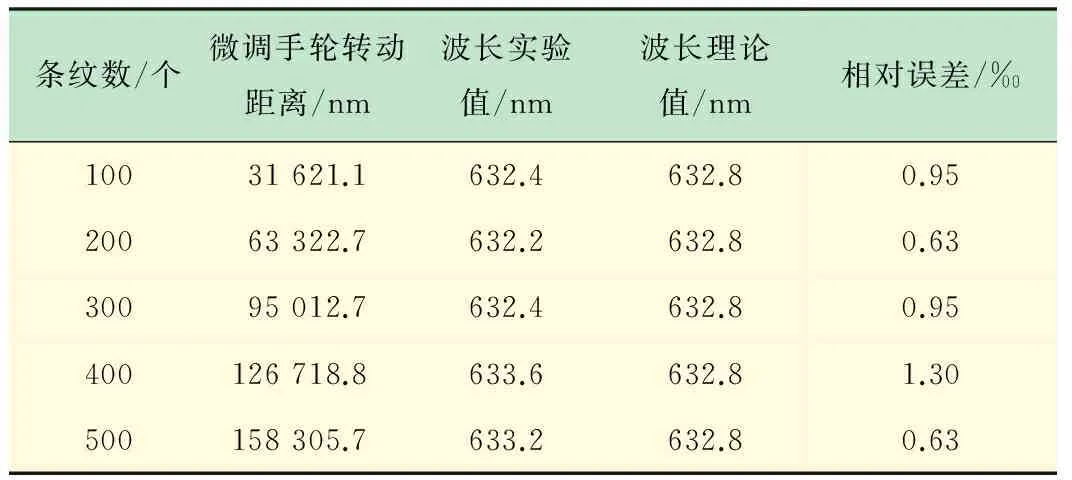
表1 He-Ne激光波长测量结果
[1] 唐鸿儒,宋爱国,张丽红,等.基于多代理系统的远程实验室研究与开发[J].计算机应用研究,2009,26(3):942-945.
[2] 姜建艿,杨秀爽,陈新华,等.基于WinCC Web Navigator的PLC远程实验室设计[J].实验室研究与探索,2008,27(12):57-62.
[3] 张 茜, 雷 勇. 基于虚拟仪器技术的网络化远程实验室系统[J]. 实验室研究与探索, 2013(9):90-93.
[4] 蒋 帅, 陈 光, 任卓君. 远程网络实验平台在线预约功能[J]. 实验室研究与探索, 2014(1):138-142.
[5] 孔 雷, 韩秀玲, 陈 光. 远程组网实验平台计时计费管理设计与实现[J]. 实验室研究与探索, 2013(5):77-80.
[6] Koike N. "Cyber Laboratory for Hardware Logic Experiments: Realizing Real Life Experiences for Many Students at Remote Sites" Cyberworlds (CW)[C]∥2012 International Conference on,2012:236-240.
[7] 孙 蓉,吕淑平,苏 丽,等. 基于西门子PLC的远程实验平台建立与实现[J]. 实验技术与管理,2013(10):87-89,99.
[8] 申冬玲. 基于线阵CCD的条纹计数器系统研究[D].长沙:中南大学,2007.
[9] 杨广武,封彦舟,涂 强,等. 基于迈克尔逊干涉仪的波长自动测量装置的设计及演示[J]. 天津城市建设学院学报,2010(3):216-220.
[10] 田 强,姬长英. 单片机和THB6128构成的步进电机控制器设计[J]. 江西农业学报,2010(5):98-100+105.
[11] 敖天勇,向 兵. 新型迈克尔逊干涉仪条纹计数器的设计[J]. 郑州大学学报(工学版),2008(1):52-55.
[12] 任志敏.一种基于OV7725的图像实时显示系统设计[J].福建电脑,2013(1):128-130.
[13] 夏 文,冯国伟,夏 武. 基于W5200的电能质量远程监控系统设计[J]. 电气技术,2012(8):88-91.
[14] 蔡剑卿,王宜怀,冯德旺,等. 基于K60的IP电话终端的设计与实现[J]. 苏州大学学报(工科版),2012(5):7-12.
[15] 包军卫. 基于IP Camera的网络视频监控系统的设计[J]. 微型机与应用,2010(24):56-58,61.
Design and Realization of Remote Experimental Operational Platform
TANGLi-jun,BINFeng,DENGMin,TANGFu-qiao,HEHui-yong
(School of Physics and Electronic ,Changsha University of Science and Technology, Changsha 410114, China)
For the needs of long-distance open experiment teaching and remote experiment operation, with Michelson interferometer as the experimental object, the authors design a remote experimental platform which consists of automatic measurement module, operating module, monitoring module, control module and interaction module. Automatic measurement module uses OV7725 camera to analyze fringes by automatically counting the number of fringes; operation module realizes the remote operation of fine-adjustment hand wheel by step motor and subdivision drive; monitoring module realizes the remote monitoring for the phenomena of stripes "emitting" or "shrinking"; interaction module realizes the remote interaction between local instructor and remote experimenter by W5200 Ethernet chips, LCD touch screen and QT interface; control module realizes the control of other four modules by K60 high-speed processor. Experimental results show that all link of Michelson interferometer experiment can be successfully completed by the use of the platform, the monitoring effects of interference fringes is clear, and the maximum error result of He-Ne laser wavelength measurements does not exceed 1.3/‰.
remote experiment; remote operation; Michelson interferometer; remote teaching
2015-01-08
国家科技支撑计划计划课题(2014BAH28F04);湖南省教育厅科学研究项目(14C0031);湖南省普通高等学校教学改革研究立项项目(湘教通〔2013〕223号)
唐立军(1963-),男,湖南邵阳人,教授,硕士生导师,现主要从事信号检测与处理研究。
Tel.:0731-85258217; E-mail:tanglj2000@263.net
TP 315
A
1006-7167(2015)12-0049-04
