水轮机调速器模糊自适应PID参数整定方法
2015-04-01陈功贵杜阳维郭艳艳唐贤伦
陈功贵, 杜阳维, 郭艳艳, 唐贤伦
(1. 重庆邮电大学 自动化学院; 复杂系统分析与控制研究中心, 重庆 400065;2. 武汉铁路职业技术学院 机车车辆工程系, 湖北武汉 430205)
水轮机调速器模糊自适应PID参数整定方法
陈功贵1, 杜阳维1, 郭艳艳2, 唐贤伦1
(1. 重庆邮电大学 自动化学院; 复杂系统分析与控制研究中心, 重庆 400065;2. 武汉铁路职业技术学院 机车车辆工程系, 湖北武汉 430205)

针对水轮机调节系统结构复杂、难以控制等问题,在传统PID控制的基础上,运用模糊理论提出了基于模糊自适应PID控制的水轮机调速器参数整定方案,以实现对系统进行实时、在线控制。在水轮机调节系统数学模型的基础上,根据PID 3个参数分别对系统性能产生的影响,完成了模糊自适应PID控制器的设计与Matlab环境下的程序编写。在系统处于不同频率扰动下,分别采用提出的模糊自适应控制方案和Ziegler Nichols算法进行仿真实验。结果表明,提出的模糊自适应控制方案是一种有效的水轮机调速器参数整定方法,相比Ziegler Nichols算法,该方案控制下的系统能获得更好的动态性能。
水轮机调节系统; 模糊自适应控制; 动态性能; 仿真实验
0 引 言
水能是一种极其重要的可再生性能源,水轮发电机组将水流中蕴含的能量转换为电能。水轮机调节系统(Water Turbine Regulating System, WTRS)是一个复杂的集水、电、气于一体,其被控系统具有非线性变参数等特性的非最小相位系统[1-2]。如何对调速器PID参数进行优化以使系统获得良好的动态过渡过程,从而得到安全、优质的电能是我们研究的重点。
维持电力系统安全经济运行是十分重要的[3],各发电厂的水轮机调速系统承担了电力系统的频率调整工作,对于这样一个复杂的综合性控制系统,常规的PID控制[4]很难达到良好的控制效果,而采用模糊自适应PID控制则可以根据系统在不同时期的需求而实时、在线地作出调整,以使系统获得良好的动态过渡过程[5-8]。本文针对WTRS,制定了相应的模糊控制规则,提出了基于模糊自适应PID的水轮机调速器参数优化方案。在系统处于频率扰动工况下,分别采用模糊自适应PID控制和Ziegler Nichols (ZN)算法[9-10]对WTRS进行仿真研究,并对实验结果进行分析与比较。
1 水轮机调节系统数学模型
WTRS是一个复杂的非线性系统,主要由水轮机调速系统、引水系统、水轮机组及发电机和负荷组成,其数学模型框图如图1 所示[1]。
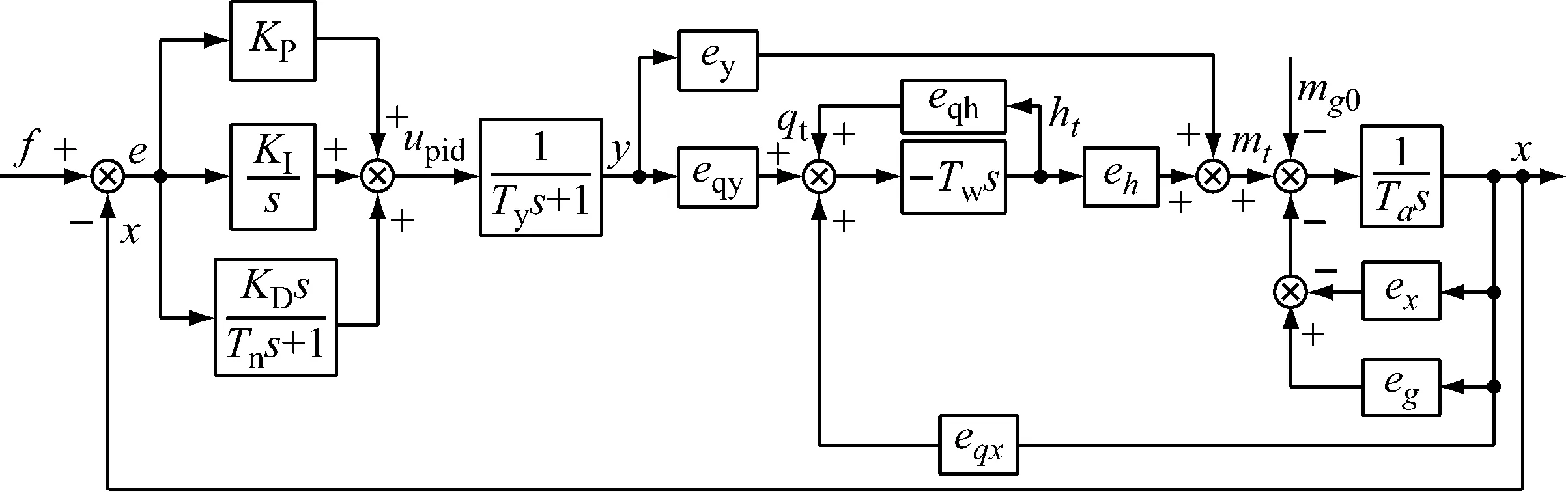
其中,水轮机调速系统由调速器和电液随动系统两个子系统组成。目前,在WTRS中比较常用的平行PID调节规律可由下式表示,
(1)
电液随动系统的传递函数由下式表示[1]:
(2)
式中:KP、KI、KD分别为调速器的比例、积分、微分调节系数;Tn为实际微分增益;Ty为接力器响应时间常数(s)。
假设水流及引水管壁均呈刚性,此时引水系统的传递函数可以表示为[1]
(3)
式中,Tw为水流惯性时间常数(s)。
水轮机组是WTRS的主要组成部分,在系统处于小波动情况下,用下式来描述出水轮机的水流及转矩特性:
(4)
式中:ey,eh,ex,eqy,eqh和eqx均为系统传递函数。
发电机系统由发电机和电网负荷组成,其中,发电机常被简化为一阶系统,其数学模型为[1]:
(5)
式中:Ta为发电机惯性时间常数(s);eg为发电机负载调整系数。
2 模糊自适应PID控制器的设计
2.1 模糊自适应PID控制器结构
传统的PID调节在对系统进行控制时,不能根据系统要求而作出实时调整,难以达到满意的控制效果。因此,我们在传统PID调节器的基础上加入模糊控制形成模糊自适应PID控制器,可以对系统进行在线、实时调整,充分发挥出模糊控制良好的鲁棒性,以达到使系统的动态过渡过程中系统超调量减小、调节速度加快等目的[11-12]。模糊自适应PID控制器的结构如图2所示[13]。

(6)
2.2 输入、输出量隶属度函数

2.3 模糊自适应PID参数整定规则
模糊自适应PID参数自整定过程就是在运行的过程中,不断检测e和ec的变化情况来对PID 3个参数进行实时地、在线地调整的过程,以满足在不同时期,系统对调速器参数的不同要求,以使系统获得良好的动态性能。


表的模糊控制规则表

表的模糊控制规则表
3 仿真实验
3.1 仿真实验数据
为了验证本文的模糊自适应PID控制器对WTRS的控制效果,在系统分别处于5%和10%频率扰动状态下进行仿真实验,并将其结果与由ZN方法得到的PID参数的控制结果相比较,并进行分析说明。所要用到WTRS参数设置:Ty=0.3,Tw=0.83,eg=0,ex=-0.877 1,ey=0.721 2,eh=1.550 5,eqx=-0.032 2,eqy=0.873 0,eqh=0.570 8。

表的模糊控制规则表
为了突出显示模糊规则的整定效果,在仿真实验前,将模糊自适应PID控制器的初值设置为:KP0=0,KI0=0,KD0=0。
3.2 实验结果与分析
图3和图4为系统分别处于5%和10%频率扰动工况下系统转速相对偏差的过渡过程,图5和图6为对应工况下PID 3个参数的自适应过程,表5为仿真实验所得到的数据。从图3和图5可以看出,在不同频率扰动工况下,相比ZN方法,模糊自适应PID控制对系统的控制效果更好。
在5%频率扰动工况下,模糊控制下的系统响应速度更快,系统超调量为0.192 7,在6.570 0 s左右系统就能基本达到稳定状态。而经过ZN方法,系统的超调量增大到了0.262 8,系统的稳定时间为11.120 0 s。由图5可得,在10%频率扰动工况下,系统的超调量由模糊控制下的0.164 6增加到了ZN方法下的0.249 1,且稳定时间也由6.620 0 s增加到10.250 0 s。由实验结果可以看出,模糊自适应PID控制下,系统能够获得良好的动态性能。
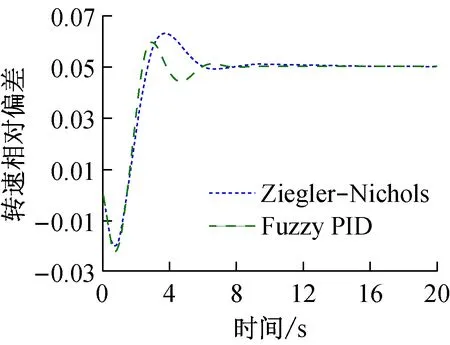
图3 5%频率扰动下转速相对偏差过渡过程
4 结 语
传统PID控制在对WTRS进行调节时,不能根据系统实时需求做出及时调整,难以达到满意的控制效果。本文在对模糊控制理论进行研究的基础上,提出了模糊自适应PID的水轮机调速器参数优化方案。在WTRS数学模型的基础上,首先完成模糊自适应PID控制器的设计及Matlab仿真程序的编写,然后在系统处于不同频率扰动工况下,运用模糊控制对系统进行仿真实验,并将其与ZN算法的控制效果进行比较。实验结果表明,模糊自适应PID控制是一种有效的水轮机调速器参数寻优方法,相比ZN算法,模糊控制下系统的响应速度较快,超调量显著减小,并且能更快趋于稳定。
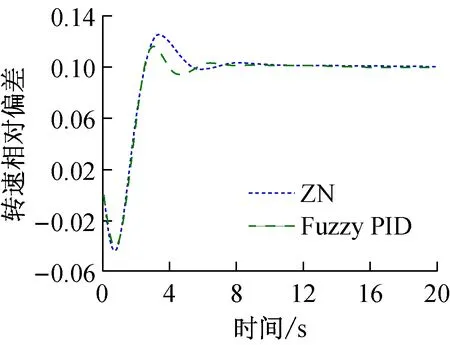
图4 10%频率扰动下转速相对偏差过渡过程


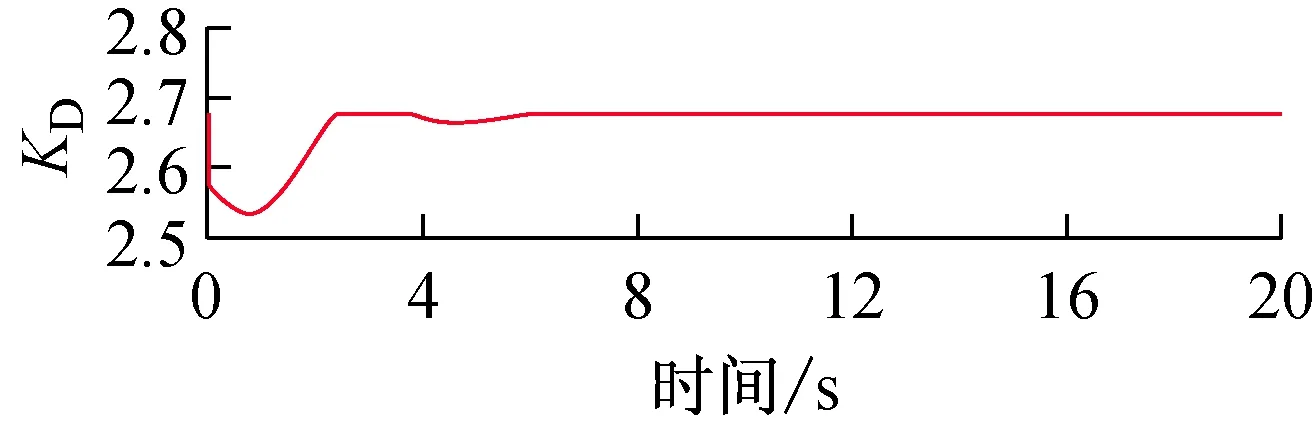
图5 5%频率扰动下PID参数自适应过程


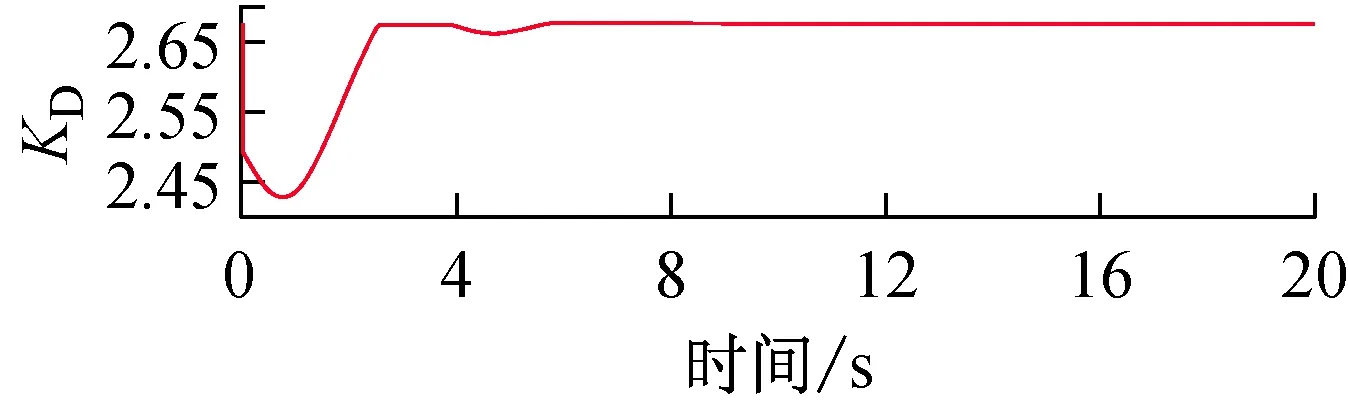
图6 10%频率扰动下PID参数自适应过程

5%频率扰动10%频率扰动模糊自适应PIDZN模糊自适应PIDZNKP-2.0300-1.9200KI/s-1-3.7400-3.4100KD/s-2.7000-2.5200超调量0.19270.26280.16460.2491稳定时间/s6.570011.12006.620010.2500
[1] 魏守平. 水轮机调节系统仿真[M]. 武汉: 华中科技大学出版社, 2011.
[2] Chen G, Du Y, Song P. Parameter optimization of hydro turbine governor PID controller by chaotic improved PSO algorithm[J]. Energy Education and Technology Part A: Energy Science and Research, 2014, 32(5): 3949-3962.
[3] Chen G, Liu L, Song P,etal. Chaotic improved PSO-based multi-objective optimization for minimization of power losses and L index in power systems[J]. Energy Conversion and Management, 2014, 86: 548-560.
[4] 余朝刚, 刘启中, 齐东平,等. 基于SIMIT SEC的水位PID控制实验[J]. 实验室研究与探索, 2008, 27(8): 216-218.
[5] Gizi A J H A, Mustafa M W, Jebur H H. A novel design of high-sensitive fuzzy PID controller[J]. Applied Soft Computing, 2014, 24: 794-805.
[6] Savran A, Kahraman G. A fuzzy model based adaptive PID controller design for nonlinear and uncertain processes[J]. ISA Transactions, 2014, 53(2): 280-288.
[7] 阳 睿, 李英姿, 张立文,等. 模糊PID控制的原子力显微镜仿真平台[J]. 实验室研究与探索, 2014, 33(1): 9-12.
[8] 林 屹, 叶小岭. 模糊自校正PID液位串级控制系统设计与仿真[J]. 实验室研究与探索, 2010, 29(3): 17-20.
[9] 王亚刚, 许小明, 邵惠鹤. 基于Ziegler-Nichols频率响应方法的自适应PID控制[J]. 控制工程, 2012, 19(4): 607-609.
[10] Meshram P M, Kanojiya R G. Tuning of PID control using Ziegler-Nichols method for speed control of DC motor[C]∥Advances in Engineering, Science and Management (ICAESM), 2012 International Conference on, 2012: 117-122.
[11] Yousef H A, AL-Kharusi K, Albadi M H,etal. Load frequency control of a multi-area power system: an adaptive fuzzy logic approach [J]. Power Systems, IEEE Transactions on, 2014, 29(4): 1822-1830.
[12] 孙小明, 马 青, 曹 虎,等. 自适应模糊PID控制在PLC变频调速同步测试中的应用[J]. 实验室研究与探索, 2014, 33(6): 16-18.
[13] 刘金琨. 先进PID控制Matlab仿真[M]. 北京: 电子工业出版社, 2011.
[14] Vindhya V, Reddy V. PID-Fuzzy logic hybrid controller for a digitally controlled DC-DC converter[C]∥Green Computing, Communication and Conservation of Energy (ICGCE), 2013 International Conference on, 2013: 362-366.
[15] Ma F. An improved fuzzy PID control algorithm applied in liquid mixing system[C]∥Information and Automation(ICIA), 2014 IEEE International Conference on, 2014: 587-591.
[16] 游 谊, 张自强, 董 燕,等. 基于模糊控制的塔式起重机定位和防摆仿真实验[J]. 实验室研究与探索, 2013, 32(2): 81-83.
A Fuzzy Adaptive PID Parameter Setting Method for Water Turbine Governor
CHENGong-gui1,DUYang-wei1,GUOYan-yan2,TANGXian-lun1
(1. Research Center on Complex Power System Analysis and Control, Chongqing University of Posts and Telecommunications, Chongqing 400065, China; 2. Department of Locomotive and Vehicle Engineering, Wuhan Railway Vocational College of Technology, Wuhan 430205, China)
It is known that the control of water turbine regulating system is difficulty since its complicated structure. On the basis of traditional PID control, a parameter control scheme of hydro turbine governor is proposed to realize the real-time and on-line adjustment of PID parameters for this system based on fuzzy adaptive PID control. According to the different influence on system performance produced by the three PID parameters, we have completed the design and programming of the fuzzy adaptive PID controller with Matlab based on the mathematical model of water turbine regulating system. The proposed fuzzy adaptive control scheme and Ziegler Nichols algorithm are simulated under different frequency disturbance. The experimental results show that the fuzzy adaptive control scheme is an effective parameter setting method for water turbine governor. This method makes the system obtain better dynamic performance compared with Ziegler Nichols algorithm.
water turbine regulating system; fuzzy adaptive control; dynamic performance; simulation experiment
2015-03-09
重庆市高等教育教学改革研究重点项目(132016); 重庆邮电大学教育教学改革项目(XJG1416)
陈功贵(1964-),男,湖北恩施人,博士,教授,主要从事电气工程专业的教学和科研工作。
Tel.:15696106539;E-mail:chenggpower@126.com
TM 612; G 434
A
1006-7167(2015)12-0021-04
