基于导电橡胶的柔性压力/温度复合感知系统*
2015-04-01田合雷郭小辉刘彩霞
田合雷,刘 平,郭小辉,刘彩霞,黄 英,
(1.合肥工业大学 仪器科学与光电工程学院,安徽 合肥230009;2.合肥工业大学 电子科学与应用物理学院,安徽 合肥230009)
0 引 言
机器人皮肤所获取的信息与机器人视觉具有互补性,是机器人与环境直接作用的媒介,柔性复合导电材料的电阻在外加压力或温度场的作用下呈现规律性变化,常用于制作机器人敏感皮肤[1]。2008 年,东京大学Someya 研究小组以单壁碳纳米管掺杂的偏二氟乙烯—六氟丙烯共聚物作为橡胶涂层,并配合有机晶体管制成具有良好机械和电学特性的柔性传感器阵列[2]。2008 年,国立台湾大学杨燿州研究小组利用微机电技术,制作了以炭黑/聚二甲基硅氧烷作为压力和温度敏感单元的大面积压力/温度传感器阵列,对不同外形物体形成的压力场进行了模拟[3]。2009 年,国立台湾成功大学林裕城研究小组利用丝网印刷技术,制作了以炭黑/酚醛树脂作为压力敏感单元的压阻阵列,对来自人手的压力进行了检测[4]。2011 年,斯坦福大学鲍哲南研究小组将碳纳米管的悬浮液喷涂到有机硅材料的表面,经双向拉伸后,碳纳米管会形成类似弹簧的微结构,但仍保持着原来的导电性能[5]。本项目组与中科院合肥智能所合作开展柔性多维力触觉传感皮肤研究较早,在柔性触觉传感器研究方面已取得较多成果[6~10]。可见,目前大部分研究集中于压力测量,对压力/温度的同步测量研究较少。
针对智能机器人皮肤研究过程中压力和温度信息的同步测量,研究小组在文献[11]中采用碳纳米管/炭黑/硅橡胶和碳纤维/硅橡胶分别制作了力和温度敏感材料,并设计了一种柔性三维力/温度复合传感器阵列信号采集与温度补偿系统。在前一工作的基础上,为进一步简化传感单元的制作和提高传感器阵列的分辨率,使传感器的压力和温度检测达到更高程度的复合,本文采用导电石墨烯/炭黑/橡胶同时制作压力和温度敏感单元,并设计相应的信号采集电路与程序,实时检测压力和温度信息。
1 压力/温度敏感导电橡胶
1.1 炭黑/橡胶的电阻—压力/温度特性
图1 为导电炭黑/橡胶的电阻—压力特性,保持温度恒定(25 ℃)。在所加力 范围内(0 ~0.55 MPa,ΔF=0.05 MPa),质量分数为8%样品的电阻呈现负压力系数(NPC)在经过下降之后趋于稳定;填料质量分数为10%,12%样品的电阻先下降,经过稳定之后又呈正压力系数(PPC)上升。NPC 效应的产生是由于外力使得导电粒子的平均密度增大导致电阻率下降。此外,压力作用下材料厚度的减小也会使电阻减小。PPC 效应可能是由于外加压力过大,导电网络出现损伤,随着填料质量分数的增大,NPC向PPC 转化的临界压力会逐渐减小。
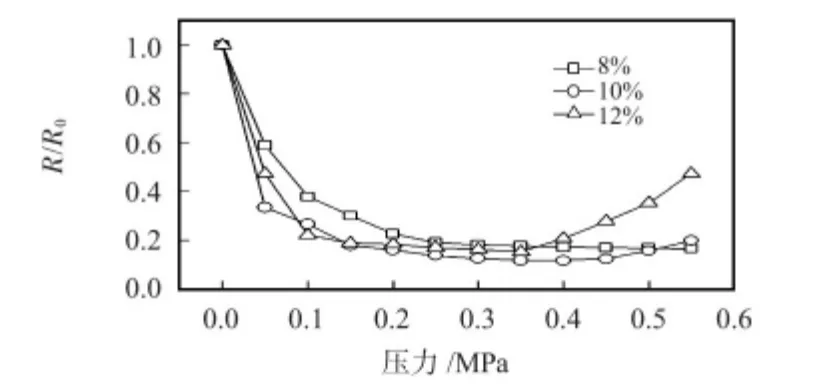
图1 导电炭黑/橡胶的电阻—压力特性Fig 1 Resistance-pressure character of conductive CB/rubber
图2 为导电炭黑/橡胶的电阻—温度特性,预加压力为0.05 MPa。可见,在所加温度范围内(25 ~90 ℃,ΔT=5 ℃),质量分数为8%,10%,12%样品的电阻均先呈NTC下降,经过稳定之后又呈PTC 上升。导电橡胶的电阻随压力和温度的变化分别呈现NPC 和PPC 效应、NTC 和PTC效应,这主要与复合导电材料中力学网络和电学网络的结构有关。复合导电材料中高分子基体以三种形式存在:1)未被导电填料吸附的大分子链,能进行自由微布朗运动;2)相互交联的高分子链,分子运动受到一定限制;3)吸附在导电填料表面致密的高分子壳层。吸附在导电填料表面的高密度分子壳与具有弹性的大分子链和高交联分子链相连,构成力学网络。当导电填料达到一定质量分数时,导电填料聚集体接近到一定距离或者直接接触而形成电学网络。力学网络与电学网络相互穿插,成为兼有力学性能和电学性能的超网络结构。
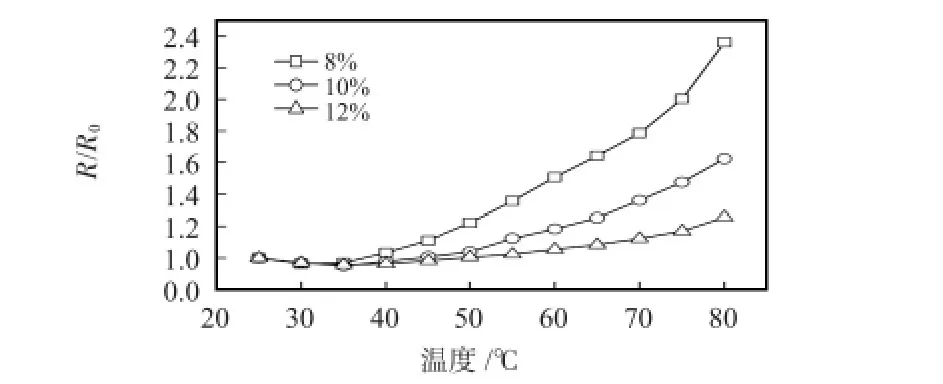
图2 导电炭黑/橡胶的电阻—温度特性Fig 2 Resistance-temperature character of conductive CB/rubber
炭黑质量分数较小时,压力作用下使得新构成的导电网络比被破坏的导电网络多,在实验压力范围内,仅表现出NPC 效应。随着炭黑质量分数增大,炭黑/橡胶的主要导电机理由隧道效应转变为直接接触导电,当压力增大到一定时,被破坏的导电网络比新构成的导电网络多,导电炭黑/橡胶呈现出PPC 效应。在温度作用下,导电炭黑/橡胶体积膨胀会导致导电粒子间间隙的增大而使电阻率上升;而温度升高又使炭黑粒子间的电子跃迁的几率增大导致电阻率出现下降。在一定温度之前,包覆在炭黑表层处于转化区的橡胶壳吸收热而松弛软化,填料聚集体之间的间隙减小,炭黑粒子间的电子跃迁的几率增大,呈现NTC 效应。温度继续上升,热膨胀起主导作用,导电炭黑/橡胶出现PTC 效应。
1.2 石墨烯/炭黑/橡胶的电阻—压力/温度特性
由于石墨烯具有优异的力学、电学性能,可利用石墨烯的高电子迁移率提高复合材料的导电特性,此外,高结构炭黑可以降低吸附在石墨烯上的硅橡胶壳层厚度,降低石墨烯间的电子跃迁势垒,促进石墨烯间的电子跃迁,提升复合材料的导电性能。吸附在高结构炭黑表面的高粘度橡胶壳还能对硅橡胶母体具有补强作用,提高石墨烯/炭黑/硅橡胶复合导电材料中力学网络的重复性。本工作以导电石墨烯(质量分数为4%)/炭黑(质量分数为0.3%)/橡胶复合材料作为压力/温度敏感材料,其电阻—压力/温度特性曲线如图3 所示。可见,在实验所加压力和温度范围内,导电石墨烯/炭黑/橡胶呈现良好的NPC 效应和PTC 效应。

图3 导电石墨烯/炭黑/橡胶的电阻—压力/温度特性Fig 3 Resistance-pressure/temperature character of conductive GP/CB/rubber
2 柔性压力/温度复合感知系统
2.1 柔性压力/温度复合感知系统硬件设计
图4 为柔性压力/温度复合感知系统框图,该系统主要分为下位机对电阻式触觉传感阵列的信号采集与上位机实时显示压力/温度信息。
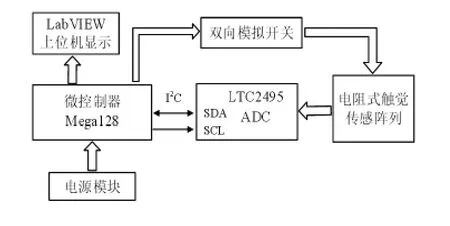
图4 柔性压力/温度复合感知系统Fig 4 Flexible pressure/temperature perceptual system
选用ATmel 公司的高性能、低功耗Mega128 作为微控制器,其内部资源丰富,节约系统开发周期。对于A/D 转换器选用具有PGA、易驱动电路和I2C 接口的16 位、16 通道△∑ADC-LTC2495。此外,其内部自带集成高精度温度传感器作为温度补偿,LTC2495 具有27 个器件地址,意味着在同一I2C 串行总线上可以挂接多个LTC2485A/D 转换器件,采集大面积电阻式传感阵列的信号。目前,对于电阻式触觉传感阵列的信号采集主要分为单点采样和行列扫描两种方式,单点采样可以解决耦合干扰,但随着阵列数增加,传感器阵列数据采样的实时性较低[12~14]。本文为提高电阻式触觉传感阵列数据采样速率和消除行列扫描存在的耦合噪声,提出了如图5 的12×12 电阻式传感阵列信号采集原理图。与传统行列扫描相比,所提出的阵列信号采集系统通过单刀双掷开关ADG734 将待转换列接参考电压,其余列悬空,完成该列中12 行电阻式触觉传感信息实时采样,不仅提高触觉传感阵列的采样速率,也消除各触觉敏感单元间的交叉干扰。电平调理模块完成对行触觉敏感单元信号进行差分电桥放大、滤波等处理,经电平调理模块后传至LTC2495 进行A/D 转换。
2.2 柔性压力/温度复合感知系统软件设计
柔性压力/温度复合感知系统下位机软件流程图如图6(a)所示,主要完成对触觉传感阵列敏感信息的采集与通过串口将数据包发至上位机实时显示功能。微处理器完成一次阵列扫描后按预定通信协议格式将数据打包发送至上位机。柔性压力/温度复合感知系统上位机开发选取图形化编程开发平台LabVIEW,其具备强大的实时数据处理功能与显示功能,其内部自带的函数库能较方便对数据进行更高级的运算和处理,新增3D 传感器映射功能支持用户导入自定义CAD 模型,在LabVIEW 前面板上便于区分独立传感器输出的新特性,具有数据可视化特点,提高测试效率。上位机软件流程如图6(b)所示,接到下位机发送的新数据,解析数据包并判断无误后显示实验结果。
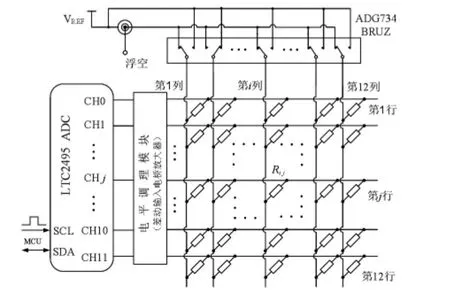
图5 12×12 传感阵列信号采集原理图Fig 5 Signal acquisition principle diagram of 12×12 sensor array

图6 柔性压力/温度复合感知系统软件Fig 6 Software of flexible pressure/temperature perceptual system
3 实验与讨论
3.1 传感器标定与误差分析
压力标定实验结果如表1 所示,可以看出相对误差均低于8%。
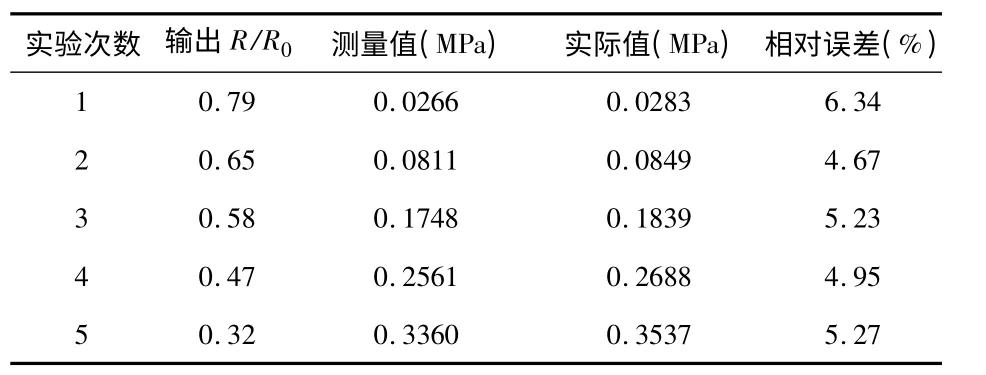
表1 压力传感器实验与误差Tab 1 Experiments and errors of pressure sensor
表2 为温度标定实验及结果,可以看出相对误差均低于6%。
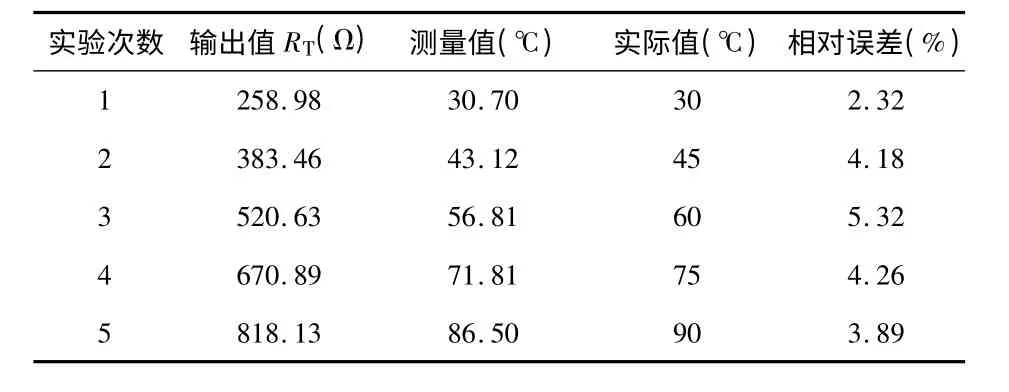
表2 温度传感器实验与误差Tab 2 Experiments and errors of temperature sensor
其误差产生的原因主要是:1)炭黑填充硅橡胶属于一种复合高分子材料,具有粘弹性,材料的蠕变特性会导致等效电阻率发生变化,在测量时引入误差;2)石墨烯/炭黑/硅橡胶复合材料同时具有温敏和力敏特性,在进行力敏感知时会受到待测物体温度的交叉干扰。
3.2 压力/温度实验结果与分析
将一正方形铁框(外部尺寸为6.5 cm×6.5 cm,壁厚0.5 cm)在恒温箱中加热至100 ℃,然后置于柔性压力/温度传感器阵列上,测得压力/温度分布如图7 所示。存在压力加载的复合传感器行与列电阻减小;存在温度辐射作用的复合传感器行与列电阻增大。各个敏感单元检测到的压力/温度的一致性较好,表明敏感材料具有良好的均一性。此外,还对该正方形铁框在室温下置于柔性压力/温度传感器阵列上进行了实验,通过对实验数据的分析,发现其电阻减小值与存在温度时电阻减小值相差较小,表明较大压力作用下的温度干扰可以忽略。
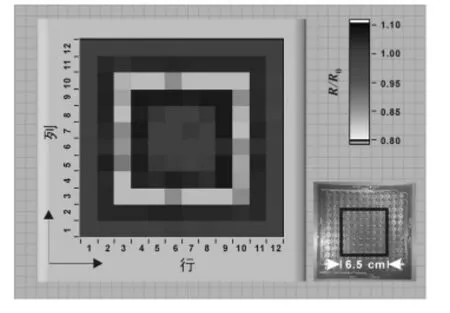
图7 压力/温度实验Fig 7 Experiment of pressure/temperature
4 结 论
本文以石墨烯/炭黑/硅橡胶复合材料同时作为压力和温度敏感材料,聚酰亚胺作为柔性基底,设计了一种应用于智能机器人皮肤可大面积成型的柔性压力/温度复合感知系统。同时,采用高性能微处理器Mega128 和LabVIEW 分别搭建了柔性压力/温度复合感知系统的信号采集电路与人机交互界面,对压力与温度数据进行分析、处理和显示。结果表明:压力标定实验的相对误差小于8%,温度标定实验的相对误差小于6%,达到了设计要求。该压力/温度复合传感器阵列具有简单的制作工艺,易于大面积成型,实现了机器人皮肤智能度的进一步提升。
[1] 向 蓓,黄 英,付秀兰,等.新型力敏导电复合材料的电阻温度特性研究[J].传感器与微系统,2008,27(7):24-27.
[2] Sekitani T,Noguchi Y,Hata K,et al.A rubberlike stretchable active matrix using elastic conductors[J].Science,2008,321(5895):1468-1472.
[3] Yang Y J,Cheng M Y,Chang W Y,et al.An integrated flexible temperature and tactile sensing array using PI-copper films[J].Sensors and Actuators A,2008,143(1):143-153.
[4] Chang W Y,Fang T H,Shen Y T,et al.Flexible electronics sensors for tactile multiscanning[J].Review of Scientific Instruments,2009,80(8):084701.
[5] Mannsfeld S C B,Tee B C K,Stoltenberg R M,et al.Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers[J].Nature Materials,2010,9(10):859-864.
[6] 徐 菲,葛运建,双 丰,等.基于新型导电橡胶的三维力柔性阵列触觉传感器研究[J].仪器仪表学报,2011,32(6):1350-1356.
[7] 丁俊香,许 刚,陈向春,等.三维柔性阵列触觉传感器结构设计[J].仪器仪表学报,2012,33(12):2721-2727.
[8] 黄 英,缪 伟,李雷鸣,等.三维力柔性触觉传感器电极研究与实验[J].电子测量与仪器学报,2013,27(1):57-63.
[9] 黄 英,陆 伟,赵小文,等.用于机器人皮肤的柔性多功能触觉传感器设计与实验[J].机器人,2011,33(3):347-353.
[10]Shih W.Flexible temperature sensor array based on a graphitepolydimethylsiloxane composite[J].Sensors,2010,4(9):3597-3610.
[11]郭小辉,黄 英,袁海涛,等.柔性复合传感器阵列信号采集及温度补偿系统[J].电子测量与仪器学报,2014,28(11):1254-1261.
[12]黄 英,郭小辉,刘家俊,等.可拼接式全柔性电容触觉阵列传感器设计与实验[J].机器人,2015,37(2):136-141,151.
[13]郭小辉,黄 英,腾 珂,等.柔性温度压力仿生皮肤的模块化设计与实现[J].机器人,2015,37(4):493-498.
[14]董万成,黄 英,明小慧,等.一种新型柔性触觉阵列传感器信号处理电路设计[J].传感器与微系统,2009,28(9):75-78.
