石英挠性加速度计数字闭环控制研究
2015-03-30朱海燕叶凌云彭皓岚马才伟
朱海燕,叶凌云,彭皓岚,马才伟
(浙江大学 生物医学工程与仪器科学学院,浙江 杭州310027)
0 引 言
石英挠性加速度计数字闭环控制可以减小模拟闭环控制中因为A/D 转换导致的精度降低的问题[1],并且易于控制和集成。关于石英挠性加速度计的数字闭环控制,多采用PWM 波反馈加矩的方式[2]。但是,由于加表表头的力矩线圈存在电感,因而会影响输入加速度值的准确测量。
针对该问题,国内外学者提出了基于A/D,D/A 直接转换驱动的方法[3,4]。该方法的反馈电流是直流信号,因而消除了线圈电感的影响。在数字闭环控制系统中,还需要一个合适的算法。国外Rojo D 等人提出过基于PID 算法的数字闭环加速度计设计专利[5],国内北京航空航天大学等单位采用的也是PID 或PI 控制算法[3,6]。但是,该算法控制精度和实时性较差[7]。为了提高数字加速度计的性能,要求系统超调不超过5%,控制精度达到0.001%,调节时间在10 拍以内。
基于以上要求,本文提出了最少拍无纹波算法。该算法是一种时间最优的算法,理论上可以解决PID 算法的上述问题。本文针对具体的表头模型,分别设计出对应的PID 控制算法和最少拍无纹波控制算法,并仿真对比了系统超调、调节时间和稳态误差等性能指标。
1 数字闭环石英挠性加速度计表头模型
石英挠性加速度计表头相当于系统的传感器,其简化结构如图1 所示[8]。
摆片的动力学模型可以近似为典型的二阶模型[9],数学方程式为
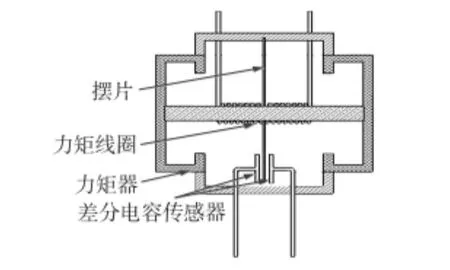
图1 石英挠性加速度计表头结构Fig 1 Mechanical meter structure of quartz flexible accelerometer
其中,θ 为摆片转角,(°);M 为外力矩,Nm;J为转动惯量,Nms2;C 为阻尼系数,Nms;K 为摆组件的刚度,Nm/rad。
这里不去详细讨论如何对表头进行数学模型的建立,而是以现有的石英挠性加速度计为研究对象来比较两种控制算法,其表头连续域传递函数[2]为

2 数字闭环加速度计最少拍无纹波控制算法设计
为了设计最少拍算法,首先需要知道最少拍系统的原理框图,如图2 所示。其中,R(z)为输入信号传递函数,D(z)为需要设计的数字控制器,G(z)为包含零阶保持器在内的广义受控对象传递函数,C(z)为输出信号传递函数,Φ(z)为闭环系统传递函数。
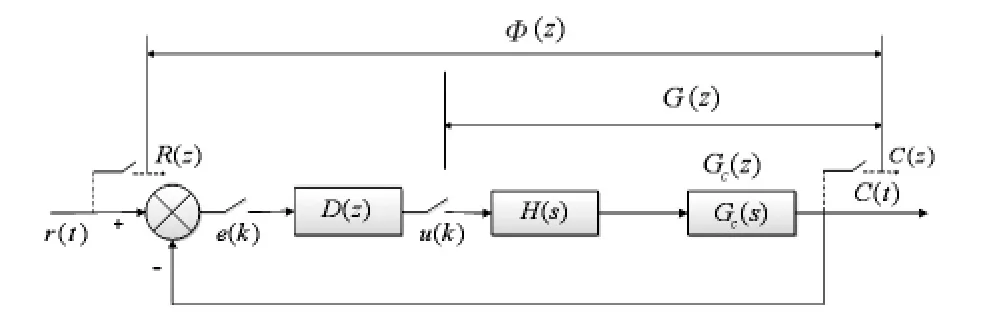
图2 最少拍控制系统原理框图Fig 2 Principle block diagram of deadbeat control
由图2 可以得出系统的闭环Z 域传递函数为

其中

可见,求解最少拍无纹波控制器的步骤有以下三步:
1)构建被控对象的数学模型,即求解Gc(s);
2)确定系统采样频率,即确定H(s)的表达式;
3)根据系统最少拍无纹波的要求,构造Φ(z)。
步骤(1)在上面已有说明,这里不再赘述,下面介绍步骤(2),(3)。
2.1 采样频率的确定
理论上采样频率越高,越能复现原始信号。但是,采样率增加会使系统带宽增大,引入更多的高频噪声[10]。另外,采样率增加会使系统的极点更趋近单位圆,降低了系统的稳定性。所以,采样率的确定要综合各种因素来考虑。根据经验,一般设定采样率为系统带宽的10 ~20 倍,这样可以确保数字控制器与连续控制器的性能相匹配[11]。由于加速度信号的频率一般不会超过1 kHz,所以,本文最终选取采样频率为10 kHz。
2.2 最少拍无纹波控制器设计
由上面式(1)、式(3)可得

由图2 可知,控制系统的误差信号e(k)的Z 域传递函数为

误差传递函数Φe(z)会因为不同的典型输入信号而不同,本系统的输入信号可以认为是一个个小的阶跃信号[12]。单位阶跃信号的Z 变换为
根据系统稳定性的要求可得

最终得到数字控制器传递函数为

3 仿真验证
本文对两种算法的控制效果进行了Simulink 仿真,在相同的采样频率和系统带宽的条件下,对比了系统超调、调节时间和稳态误差等方面性能。
3.1 最少拍无纹波控制算法的Simulink 仿真
Simulink 环境下的最少拍无纹波控制算法仿真框图如图3 所示,输入是单位阶跃信号(Step),输出通过示波器(Scope)来观察,采样频率f=10 kHz。

图3 最少拍无纹波控制算法Simulink 仿真图Fig 3 Simulation diagram of ripple-free deadbeat control algorithm by simulink
仿真结果如图4(a)~(d)所示。
由图4 可以得到系统具体性能指标如表1 所示。

表1 最少拍无纹波控制系统性能指标Tab 1 Performance indexes of ripple-free deadbeat control system
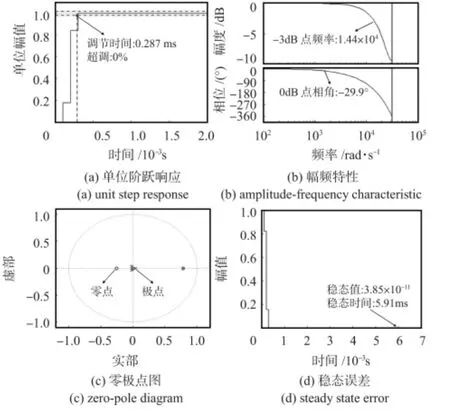
图4 最少拍无纹波控制算法仿真结果Fig 4 Simulation results of ripple-free deadbeat control algorithm
3.2 PID 控制算法的Simulink 仿真
Simulink 环境下的PID 控制算法仿真框图如图5 所示。
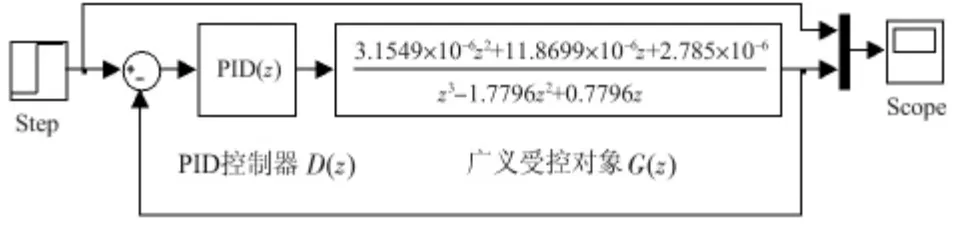
图5 PID 算法的Simulink 仿真图Fig 5 Simulation diagram of PID algorithm by simulink
通过调节Simulink 工具箱中的Tune 按钮,动态地调整PID 参数,使得系统的带宽与最少拍无纹波控制算法一致。仿真结果如图6(a)~(d)所示。
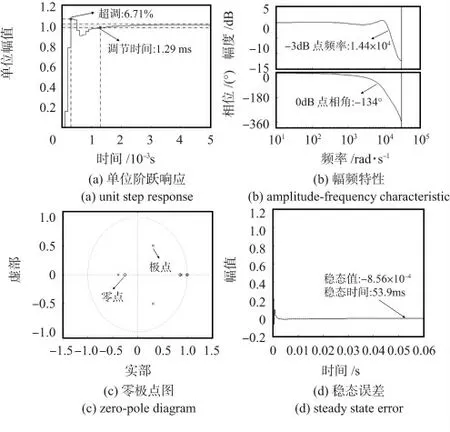
图6 PID 控制算法仿真结果Fig 6 Simulation results of PID control algorithm
由图6 可以得到系统具体性能指标如表2 所示。

表2 PID 控制系统性能指标Tab 2 Performance indexes of PID control system
结合图4(a)和图6(a)可知,PID 控制系统超调为6.71%,超过5%,远大于最少拍算法的超调;调节时间为1.29 ms,超过10 拍,远大于最少拍算法的0.287 ms。因此,PID 控制系统的实时性和相对稳定性较最少拍算法要差。
结合图4(b)和图6(b)可知,PID 控制系统的谐振峰增益相对较大,幅值裕度和相位裕度相对较小,系统的稳定性较最少拍算法要差。
结合图4(c)和图6(c)可知,PID 控制系统的极点分布更趋向于单位圆,系统的相对稳定性较最少拍算法要差。
结合图4(d)和图6(d)可知,PID 控制系统的稳态误差为8.56×10-4,大于0.001%,而最少拍系统的稳态误差只有3.85×10-11,远小于0.001%。PID 控制系统达到该精度的时间为53.9 ms,远大于最少拍系统的5.9 ms。因此,PID 系统的控制精度和响应速度较最少拍算法要差。
综合以上可知,虽然PID 算法可以使系统稳定,但是与最少拍无纹波控制算法相比,PID 算法达到稳态需要更长的调节间,并且系统的超调和稳态误差也更大。因此,PID控制算法在系统实时性、准确性、稳定性等方面的性能较最少拍无纹波算法相对较差。
4 结 论
在石英挠性加速度计数字闭环控制系统中,最少拍无纹波算法比PID 算法具有更好的控制性能。仿真证明:在相同的带宽和采样频率下,最少拍无纹波算法的超调量远小于5%,调节时间只需要3 个采样周期,稳态精度可以达到0.001%以下,综合性能优于PID 算法。因此,在一些对控制精度和响应速度均有较高要求的场合,最少拍无纹波控制算法有着很大的应用价值。
[1] Li Lin,Zhang Chunxi,Zhang Xi,et al.Investigation on noise of digital closed-loop Q-flex accelerometer[C]∥6th IEEE Int'l Conference on Industrial Electronics and Applications(ICIEA),Beijing:IEEE,2011:614-619.
[2] 夏 瑜.石英挠性摆式加速度计全数字伺服回路技术[D].天津:河北工业大学,2008:14-19.
[3] 张 晞,张声艳,顾欣怡,等.数字闭环石英挠性加速度计表头离散化研究[J].传感器与微系统,2012,31(12):62-65.
[4] Soen Jonathan,Voda Alina,Condemine Cyril.Controller design for a closed-loop micromachined accelerometer[J].Control Engineering Practice,2007,15(1):57-68.
[5] Rojo D.Closed-loop accelerometer system,has rebalancing controller comprising proportional-integral-derivative control portion having variable gain components,where controller is in signal communication with driver:US,2010057224—A1[P].2010—03—04.
[6] 顾欣怡,张 晞,魏 渊.数字闭环加速度计控制器设计与仿真[J].弹箭与制导学报,2012,32(6):170-173.
[7] 曹承志.微型计算机控制新技术[M].北京:机械工业出版社,2001:170.
[8] 陈 浩.基于ARM 的石英挠性加速度计采集处理系统设计[D].哈尔滨:哈尔滨工程大学,2007:4-5.
[9] 毛伟玲.基于模型辨识的石英挠性加速度计控制回路设计[D].天津:天津大学,2012:21-23.
[10]张 晞,张声艳,曹巧媛.数字闭环石英挠性加速度计量化误差分析与实验研究[J].传感器与微系统,2013,32(11):33-36.
[11]Franklin G F,Powell J D,Emami-Naeini A.Feedback control of dynamic systems[M].Beijing:Publishing House of Electronics Industry,2004:442-443.
[12]叶凌云,陈 波,张 建,等.基于最少拍无纹波算法的高精度动态标准源反馈控制[J].浙江大学学报:工学版,2013,47(9):1554-1558.
