航空摄影测量面阵相机与线阵相机数据生产工艺的探究
2015-03-30唐健林董文浩周高攀
唐健林,龙 盈,董文浩,周高攀
(湖南省地质测绘院,湖南 衡阳421001)
摄影测量按摄影站的位置可分为航天摄影测量、航空摄影测量、地面摄影测量和水中摄影测量[1]。这里笔者谈论的是航空摄影测量遥感系统,所使用的面阵相机与线阵相机在数据生产工艺上的差异性与优劣性,航空摄影测量相机使用的遥感平台主要是飞行于大气层内的各类飞机、飞艇、热气球等。随着遥感成像技术和计算机技术的发展,航空摄影测量相机经历着从回收型向传输型、从模拟向数字化的转变。
目前在测绘应用处理中已经大规模使用适时传输的数字摄影方式,完全取代了之前的胶片式拍照冲洗的摄影方式,大大缩短了影像获取周期,使得测绘应用方便简单,为社会建设事业作出了巨大的贡献。
我国现已大量引进Microsoft Vexcel公司的UltraCam系列相机,如UCXP、UCX、UCD、UCLP等,以及Z/I公司的DMC系列相机等国外航空摄影测量相机;国产SWDC航测相机也在大面积投入使用;与此同时,受天气影响小、地域影响小的低空无人飞行器所载的小数码相机(如Canon EOS 100D与Nikon D810等)也在蓬勃兴起。由于我国是地形条件比较复杂的国家,不同省份的海拔高度差异大,植被覆盖迥异。因此,近年来引进了徕卡的航空摄影测量相机ADS系列,大大减少了外业像控数量,让原本无法实现大比例尺航空摄影测量的地区也能够进行立体测绘。
一、面阵相机与线阵相机成像原理
如图1所示,左图为线阵相机摄影的模拟图,右图为面阵相机摄影的模拟图。
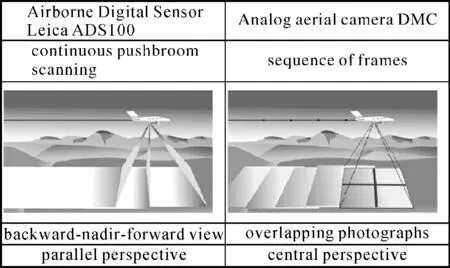
图1 航空摄影模拟
其中,面阵相机成像原理以早期的基于8镜头面阵CCD数字航摄仪DMC为代表。在航摄过程中,8个镜头中心投影同步曝光(间隔小于10-9s),4个全色镜头分别获得7000×4000像素的数字影像,4个多光谱镜头获得3000×2000像素的数字影像[2]。通过对4个全色镜头影像进行几何检校、影像匹配,以及相机检校和光束法空三加密等处理将其虚拟成固定焦距的非严格中心投影的全色影像。以同样的技术和方法将4个多光谱镜头获取的影像虚拟拼接与全色的“合成”影像进行融合处理,进而获得高分辨率的RGB数据和彩红外数据[3]。
线阵相机以ADS100为例,其成像原理在于独特的F4焦阑镜头和分光镜组件使得入射光线以合适的角度和分色光到达焦平面上各自对应的不同区域,其图像更具有理想的解释性能。由于ADS100数字航摄仪采用的CCD传感器成像器件是前视角(25.6°)、后视角(17.7°)和下视角(43.3°)共13条20 000元件的CCD线阵式排列的多中心投影方式(绿色波段以半个像素的大小交错排列),因此,一次飞行就可同时获取100%重叠的3个彩色波段、3个红外波段的立体影像,拍摄到的是一整条带状无缝隙的影像。
二、常规作业流程
面阵相机的影像数据一般是采用L3级8 bit影像的原始影像作空三加密,这里笔者以UCXP(11 310×17 310)和DMC(7680×13 824)为典型代表;而线阵相机采用L0级或L1级16 bit影像处理空三,这里笔者以ADS100(20 000×N,N为SAMPLES,与飞行千米数有关)相机为例。如图2、图3所示。
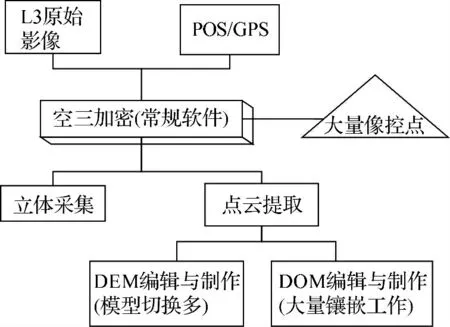
图2 面阵相机作业流程
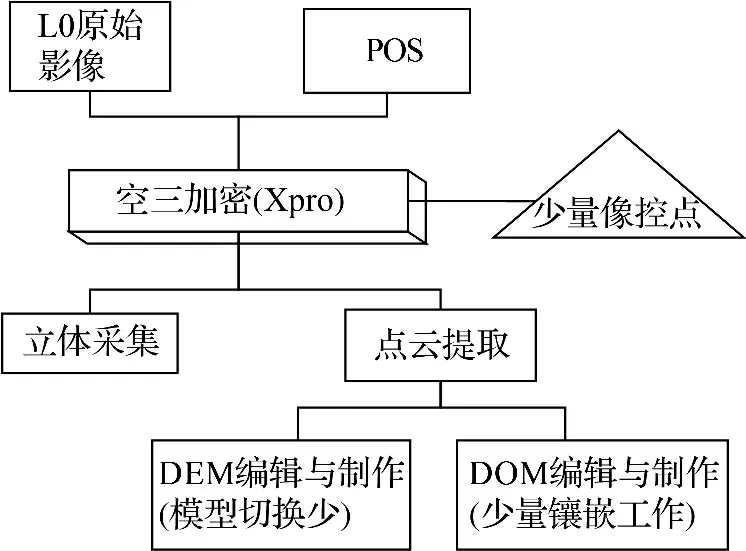
图3 线阵相机作业流程
三、数据生产工艺的特点
1.面阵相机数据生产工艺的特点
面阵相机的影像数据大多由4块或4块以上CCD互成一定角度拍摄,子影像经过辐射校正与几何纠正拼接生成虚拟中心投影的影像。数据一般可以实时传输。
面阵相机的影像空三加密是非常复杂繁琐的工序,特殊地形需要人工大量干预,数目众多的控制点转刺与管理,给作业员工作带来许多不便。特别是时间久远的像控资料,转刺过程要求作业员具备足够的判读经验,而且所花费的时间较多。尤其是低空无人飞行器搭载小数码相机的数据,在设计像控点时由于基线短、姿态差,为了保证控制达到设计精度,像控点布设数量较多,外业工作量巨大。
面阵相机数据空三加密过程中,每一张影像都必须匹配到足够的连接点来保证像点网稳固,从而有效利用地面控制点来进行平差计算,解算出每张像片精确的6个外方位元素,才能保证后续数字产品得以正常生产。加密成果输出后,在数字产品DLG、DEM和DOM生产过程中,作业员就会发现像对切换相当频繁,镶嵌接缝线编辑次数多。面阵相机所拍摄的影像数据色彩差异大,对后期匀光匀色的制作工艺考验也很大,处理不当,极易出现废片的情况。
2.线阵相机数据生产工艺的特点
线阵相机数据能够同时获取立体影像和彩色多光谱影像,它采用线阵列推扫成像原理,能够同时提供3个全色与4个多光谱波段的数字影像。该相机全色波段的前视、下视和后视影像可以构成3个立体像对。彩色成像部分由R、G、B和近红外4个波段组成,经过融合处理获得真彩色影像和彩红外多光谱影像。载荷越多,数据存储所需要的硬件空间越多,相机附带设备性能要求越高。
线阵相机的数据一条航带一般是一个视角或多个视角的数据。空三加密需要特制软件,如Leica Xpro。普通软件由于格式解析等多种原因可能不能满足该数据的空三加密。
一般人们普遍认为采用绿色波段L0级数据使用Leica XPro系列软件自动匹配或人工转刺少量标准点位的点,同时量测少量的地面控制点,并调用Orima平差来进行空三加密的这种模式是精度最高、最可靠的。国内也有使用XPro解析出来的L1级数据进行空三加密的,如俄罗斯Racurs公司的PhotoMod,国内常见的四维空间的PixelGrid和武汉大学的DPGrid都能胜任。加密成果输出后,后期制作DEM、DLG和DOM的步骤相对简易些,像对切换次数少,镶嵌编辑容易。由于该类型的相机具备先进的层叠光束分离技术,数据色彩效果相对比较均一,后期匀光匀色技术难度不大。
四、差异性与优劣性
面阵相机数据与线阵相机数据的特点重点可以归纳为7点,见表1。
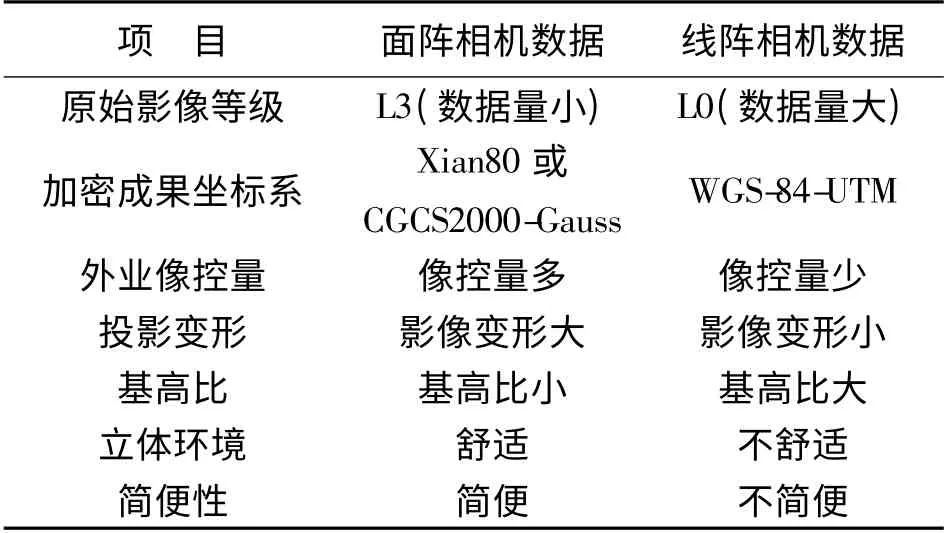
表1 两种相机优劣对比
1.不同Level的原始影像
面阵相机数据比较典型的特点是空三加密的原始影像一般可以供后期的处理使用。而线阵相机的数据空三加密的原始影像(L0级)是不能供后期使用的,至少需要作一定的处理后输出为L1级数据。面阵相机的数据量相对不是很集中,因此数据量要小。而线阵相机的数据根据飞行的千米数增加数据量剧增,对处理设备有很大的硬性要求。不仅要有海量的数据存储介质,还要有稳定的机器性能,最为重要的是还要有相对比较好的单机处理能力。
2.空中三角加密成果坐标系
两种相机生产出来的数据还有一个比较典型的特点,即线阵相机数据空三加密出来的成果是WGS-84-UTM投影成果,并非我国常用的1980西安坐标系或CGCS2000坐标系椭球的Gauss投影成果,需要在前期或后期进行投影变换。在武汉航天远景的MapMatrix软件中进行投影变换后,生产流程就与面阵相机数据生产没有差异。虽然程序编写与处理难度大,但是与面阵相机一致的作业界面使得作业员没有很大的感觉。
3.空中三角加密与外业像控
我国是地形比较复杂的亚洲国家,有许多省份属于多丘多山的地形。自然村落与经济作物地大多分散分布在茫茫大山中,常规面阵相机摄影的数据很难满足山地复杂地形。一方面,外业像控基线长度很难满足大比例尺国标要求;另一方面,植被覆盖茂密,对空三转点也增加了难度,使得作业周期变长。但是对于线阵相机数据来说,由于其独特的数据源和特殊的制作工艺,这些问题可以很大程度上避免。因为有精密的惯导系统,使得它即使在无控或少数几个像控点的条件下,仍然能满足小比例尺成图的内业作业要求;如果有分布足够的像控点就能满足大比例尺的内业作业要求。
4.投影变形的差异性
数字航空线阵相机获取的推扫式条带影像的变形更小且方向一致,更适合于立体测图和制作影像图。采用下视影像制作正射影像图效果最佳。
数字航空面阵相机采用多镜头的共中心或虚拟中心投影方式成像,投影变形更加复杂。镶嵌后的影像投影变形无规律。
5.基高比差异性
ADS100同时获取3个角度100%重叠的连续影像,最大基高比为0.8,可满足立体测图对高程量测的精度要求。
DMC相机获取的影像在足够的航向重叠的前提下,基高比最大可以达到0.35[3],可以满足立体测图要求。但是相对于ADS100相机的基高比来说,DMC相机的数据高程精度相对比ADS100差些。
6.立体环境视觉舒适度
ADS100数据在实际生产过程中,为了交会出比较好的高程精度,一般情况下采用前视和后视去恢复立体环境,因此视场很大,立体环境高程拉伸明显,作业员长时间采集会有眼睛不适的感觉。相对于面阵相机数据,恢复的立体环境要舒适很多。
7.快速反应能力与便携性
由于面阵相机航摄成本要比线阵相机的成本相对低很多,因此,我国还没有大面积使用线阵相机去进行航空摄影。特别是无人飞行器低空飞行拍摄对天气要求不高,相对线阵相机有天然的优势,其具备快速反应、快速飞行、快速处理等典型特点。线阵相机一般在110~120 kg之间,相对比较笨重和昂贵,很少应用于小型飞行器。
五、测绘案例
根据《湖南省不动产统一登记基础数据建设项目任务书》的规定,如图4所示,湖南省不动产统一登记基础数据建设安化测区面积约为2 778.4 km2。任务区内共包含113个点位,点位分布均匀。摄区内植被茂密,地形相对高差1565 m,有较大型山脉29支,海拔1000 m以上的山峰157座,属典型的山区县。如果使用面阵航摄仪,要满足地面分辨率为0.2 m且航摄要求满足规范[4-5]要求,航飞摄区划分会很小,每架次航摄利用率很低,浪费航飞窗口(山区晴朗无云、少云的时间很少)。另外,由于摄区内高山林立,植被茂密,导致空三转点成功率下降,外业像控布设困难重重。因此航线跨度可以达到几十千米甚至上百千米的线阵ADS航摄仪,就可以大大避免这些问题。该测区为线阵推扫式航摄仪ADS100获取影像,包含41条航线,航带平均跨度为58 km,外业像控点跨度最低9 km,最高23 km。且航向重叠能达到100%,旁向重叠一般40%~80%。与此同时线阵相机数据空三转点不需要很多连接点,项目最终通过外业散点检查。查阅相关文献,测区加密精度[6]仍然能达到规范要求。后期流程制作过程中,由于数据量巨大,航测工作站存储设备容量增大4~5倍。
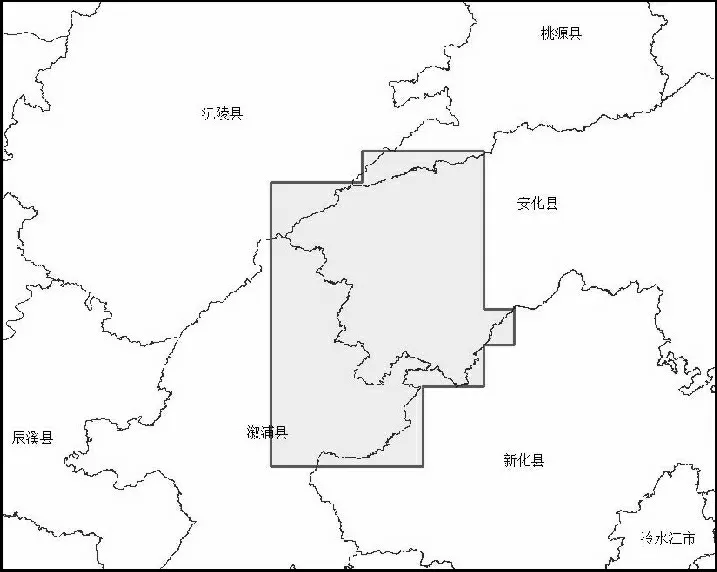
图4 安化测区
如图5所示,湖南省不动产统一登记基础数据建设双牌测区面积约为2 340.3 km2。该摄区以山地为主,丘陵、岗地兼备,森林覆盖达到80%左右。由于植被相对比较低矮,像控布设难度相对容易,航线跨度相对较小。故该摄区采用框幅式航摄仪,共包含有N1—N19共19条航线,1000多张“神鹰”相机(UC-Eagle)所拍摄的影像,航带平均跨度为52 km,外业像控点跨度最低4 km,最高15 km。空三加密过程中采用“GPS+控制点”的平差模式[7],测区加密精度经过外业散点检核合格。后期流程制作过程中,相对切换多,镶嵌编辑量等缺点很明显。
六、结束语
我国的测绘事业实现了从传统复杂工艺到目前与时俱进的快速制作工艺的重大转变。在实际测绘应用中,需使用最合适的方式去完成测绘项目,为国家建设作出自己的贡献。不管是面阵相机还是线阵相机,都有自己的优势和缺点,因此要根据实际情况选择合适的摄影方式和制作工艺。

图5 双牌测区
[1] 方子岩,唐健林,董向勇,等.摄影测量学[M].武汉:长江出版社,2012.
[2] 王佩军,徐亚明.摄影测量学(测绘工程专业)[M].2版.武汉:武汉大学出版社,2010.
[3] 赵桂华.大面阵CCD数字航空相机影像预处理技术与研究[D].郑州:信息工程大学,2012.
[4] 国家测绘局.1∶500 1∶1000 1∶2000地形图航空摄影测量内业规范:GB/T 7930—2008[S].南京:凤凰出版社,2008.
[5] 国家测绘局.数字航空摄影测量 空中三角测量规范:GB/T 23236—2009[S].北 京:中 国 标 准 出 版社,2009.
[6] 王江,武吉军.徕卡ADS80数字航空相机空三精度分析[J].测绘与空间地理位置,2011(5):231-233.
[7] 袁修孝.GPS辅助空中三角测量及其质量控制[M].北京:测绘出版社,2001.