激光高阶回馈微位移测量系统设计及误差分析
2015-03-29曾召利屈学民李维娜
曾召利,屈学民,文 峻,李维娜,张 敏
(第四军医大学生物医学工程系数理教研室,陕西 西安710032)
1 引言
激光回馈是指激光输出被外部物体反射后,一部分光返回到激光器谐振腔与腔内光场发生自混合干涉,由于回馈光携带了外部物体的运动信息,因此通过解调回馈光的信号就可对外部物体的位移等参数进行测量[1]。目前,激光回馈测量系统一般采用的都是单重回馈效应[2-3],即回馈光在回馈外腔中往返一次后就返回到激光谐振腔,产生锯齿状[4-5]或类正弦[6-7]的回馈条纹。在单重回馈效应中,外部物体每移动半个波长的位移激光输出就产生一个回馈条纹,即每个条纹对应的分辨率为二分之一波长(几百纳米)。为了获得更高的分辨率,人们对激光高阶回馈效应进行了研究(即回馈光在回馈外腔中往返多次后才返回到激光谐振腔),获得了分辨率为几十纳米甚至几纳米的回馈条纹[8-11],为进一步研制高精度的回馈位移测量系统奠定了基础。
在对基于非准直平凹回馈腔的双频激光高阶回馈系统研究中,获得了分辨率达到λ/44的偏振正交回馈条纹;而且两偏振正交回馈条纹间还具有位相正交的特点,可方便地用于位移方向的识别[12]。基于以上发现,本文设计了一套基于激光高阶回馈的高精度微位移测量系统,量程为500μm,分辨率达到0.7 nm,并对系统的测量误差进行了分析。
2 激光高阶回馈位移测量原理
基于非准直平凹腔的激光高阶回馈微位移测量系统如图1所示,腔镜M1、M2、激光增益管T和石英晶体Q组成半外腔双折射双频氦氖激光器(波长为632.8 nm)。靶镜M3固定在PI微动台上,它与腔镜M2组成平凹回馈外腔,激光在镀有高反射膜的回馈外腔中经历多次往返后再回到激光谐振腔,形成高阶回馈。腔镜M1端的输出光经沃拉斯顿PBS后,由PIN探测器D1、D2分别接收,然后进入电箱C进行计数及显示处理。
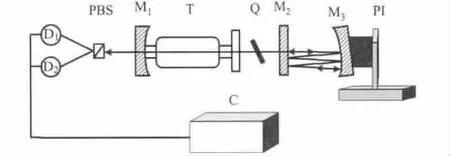
图1 激光高阶回馈位移测量系统原理图Fig.1 Structure of displacement measurement system with laser high order feedback
当存在激光高阶回馈时,双频激光器的激光输出Io和Ie可表示为[12]:

式中,Io0和Ie0表示无光回馈时的激光输出;q表示回馈光在回馈外腔中最大的往返次数(最大回馈阶次);c为光在真空中的速度;ωo和ωe为激光的角频率;l为回馈外腔长;m为回馈阶次;ηm表示第m阶回馈光的回馈系数;fm表示回馈光第m次往返后回到激光谐振腔的耦合效率。
从式(1)可以看出,存在激光高阶回馈时,激光的两正交偏振光都会受激光外腔长调制,并产生两束高倍频的激光回馈条纹(即高分辨率回馈条纹),条纹的分辨率主要由回馈阶次决定;而且,两偏振正交回馈条纹间还具有一定的位相差,该位相差可以通过旋转腔内石英晶体进行调节,从而获得位相正交的回馈条纹,对这两偏振正交、位相正交的回馈条纹进行脉冲计数,就可以实现对外部物体的位移测量。
3 位移测量系统设计
3.1 光学系统
光学系统是激光高阶回馈微位移测量系统的主体,主要包括双频激光器、石英晶体、反射镜、分光棱镜和衰减片等。双频激光器是光学系统的核心,它不仅是测量系统的光源,同时也是传感器,双频激光器的各项参数设计如下:
(1)激光器谐振腔长L的确定:激光器的谐振腔长决定激光器的输出功率与纵模间隔。激光器的谐振腔长越长,其增益管的长度越大,输出功率越高,而激光器的纵模间隔与谐振腔长L的关系为:

式中,Δν为纵模间隔;c为真空中的光速;n为激光增益介质的折射率;L为激光器的谐振腔长。根据氦氖激光器出光带宽大小(约1500 MHz),为了使激光器工作于单纵模状态,同时保证有较大输出功率,激光器的谐振腔长设计为170 mm。
(2)激光器腔镜曲率半径R的确定:在平凹腔激光器中,凹面反射镜的曲率半径R选择与谐振腔长L有关,其比值为β=R/L。在激光器谐振腔长一定的情况下,如果R越大,那么β越大,此时激光器的光斑尺寸越大,菲涅尔数减小,衍射损耗增大,对谐振腔的精度要求较高。反之,如果R越小,谐振腔的调节精度要求越小,调整越容易,但此时激光器的模体积小,激光输出功率也会变小,并且容易出高阶横模。综合考虑以上因素,激光器凹面镜的曲率半径设计为R=1 m,对应的β值约为5.8。
(3)放电毛细管内径d与长度l的确定:毛细管直径的大小决定着激光器的增益系数和谐振腔的横模损耗,关系到激光器的输出功率和输出模式。谐振腔理论表明,TEM00模比其他高阶横模的衍射损耗都要低,减小毛细管的内径会抑制高阶横模的出现,使激光器工作在基横模状态;但是毛细管内径也不能太小,否则会增大TEM00模的损耗而影响激光器的输出功率。一般毛细管内径d的选择是根据凹面镜上的光斑尺寸ω来决定,二者之间的关系为:

对于平凹腔结构,光斑半径ω由腔长L和凹面镜曲率半径R决定:

式中,L和R单位为厘米。将前面选取的腔长L=170 cm以及凹面镜M1的曲率半径R=100 cm代入式(4),可得光斑半径ω=0.301 mm。再由式(3)取d=3.0ω,可确定毛细管直径d约为0.9 mm。对于普通的氦氖激光器,其最大增益满足如下表达式:

式中,l是以厘米为单位的毛细管长度。根据加工经验并结合增益管长度和毛细管直径需求,设计的毛细管长度为120~140 mm。
(4)石英晶体:石英晶体是放置在腔内的双折射元件,由它频率分裂产生偏振正交的双频激光。为了减少石英晶体在腔内的损耗,它的两个通光表面都镀有增透膜;同时,为了减少旋光效应的影响,石英晶体采取的是光轴零度切割。
3.2 机械结构设计
激光器的增益管密封在铝筒中,铝筒用两套半圆的殷钢装卡机构固定在殷钢底板上。石英晶体片装在殷钢套中,该殷钢套可以绕着竖直方向任意旋转,从而方便地调节双频激光器的频差。激光器的平面腔镜通过二维调节架固定在殷钢底板上。消偏振分光棱镜安装在L形平台上,上面用压片压紧,这种设计的好处在于,不但装置十分小巧,而且能够满足分光棱镜三个方向通光的要求。沃拉斯顿棱镜安装在一个可自由旋转的圆柱形套筒中,以选择适当的分光位置。以上所有光学元件都固定在同一块殷钢底板上,以提高仪器的稳定性。
3.3 电路设计
激光高阶回馈微位移测量系统的电路处理采取模块化设计,主要包括:信号探测模块、信号细分模块和计数与显示模块三部分。
(1)信号探测模块
信号探测模块的功能是将包含位移信息的光强信号接收并转换为电信号。综合考虑探测器的有效接收面积和响应速度等参数,系统采用的是日本滨松公司的S1223型PIN探测器,该探测器的探测面积与光电池基本相同,约为5 mm2;而响应带宽远高于光电池,达到30 MHz。同时,为了便于后续处理,光电转换后的信号还采取了滤波、放大等处理。
(2)信号细分及判向模块
电子信号细分是提高仪器分辨率的主要手段,目前常用的电子细分方法包括电阻链细分、空间细分和锁相倍频细分等。本测量系统采用的是电阻链细分方法,它是低倍频情况下一种很好的细分方案。在电阻链细分过程中,三路有90°位相差的类余弦信号(即sin、-sin和cos信号),被送入电阻链细分电路并将信号相位依次移动18°,然后分成两组,分别经过两两异或组合逻辑把一个正弦波周期分为五个方波周期,实现五细分。
经过电阻链五细分电路,得到了两路有90°位相差的方波信号,两路方波在一个周期内具有两个上升沿和两个下降沿,通过对两路方波信号的边沿进行处理还可实现逻辑四细分,如图2所示。因此,经过电阻链五细分和逻辑四细分,总共实现了电子20细分,从而将λ/44的光学分辨率进一步提高到了λ/880(0.7 nm)。同时,根据两方波信号的相位超前与滞后关系,可方便地识别被测目标的运动方向。
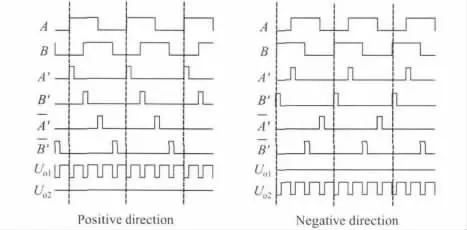
图2 逻辑四细分及判向原理图Fig.2 Schematic of logic four division and direction judgment
(3)计数与显示模块
计数与显示模块的主要功能是统计细分模块输出的计数脉冲,并转换成位移值显示出来。该模块由CPLD和单片机协同完成,CPLD中编写了一个24位的二进制可逆计数器,可对正向脉冲Uo1和反向脉冲Uo2进行累加,计数结果经过接口电路输入单片机,然后乘以脉冲当量得到位移值并送液晶屏显示。
4 实验测试
采用激光高阶回馈微位移测量系统对PI定位台(P-621.1CD)的微小位移进行了测试。实验中,以PI定位台的位移量为基准,其位移值记录为Xi(μm);同时,记录激光高阶回馈微位移测量系统的测量值Yi(μm),测试结果如表1所示。从表中可以看出,激光高阶回馈微位移测量系统的测量值与PI定位台的位移量吻合得很好。

表1 激光高阶回馈微位移测量系统测试结果Tab.1 Test results of high order feedback system
5 测量系统的误差分析
(1)条纹位相变化导致的测量误差
在激光高阶回馈微位移测量系统的电子细分过程中,如果两路信号的位相差不是90°,就会造成细分不均匀,引入测量误差。不过,由于回馈镜每移动1/44个波长,回馈信号变化一个周期,而每个周期系统具有自校准功能,误差不会累加,所以相位变化导致的细分不均只会影响最后一个测量周期的五细分信号。在500μm的量程内,两正交偏振回馈条纹间位相差的变化量一般小于π/9,由此引起的误差为:

(2)空气折射率变化导致的测量误差
空气折射率变化引入的测量误差可表示为:

其中,nair表示空气折射率;Δnair表示空气折射率的变化,根据Edlen公式,Δnair可按下式求得:

其中,Δt、Δp和Δf分别表示温度、气压和湿度的变化量。假定较好环境下,nair≈1,Δt=1°C,Δp=10 Pa,Δf=10 Pa,则空气折射率引起的测量误差为:

因此,在500μm量程范围内,由空气折射率引起的测量误差为0.45 nm。
(3)测量起始与终止位置导致的测量误差
由五细分工作原理可知,当回馈镜位移量小于λ/44×5时,五细分电路可能输出一个计数脉冲,也有可能不输出计数脉冲,此时引入的最大测量误差为:

6 结论
设计了一套基于激光高阶回馈效应的微位移测量系统,给出了系统中双频激光器的关键设计参数,介绍了系统的信号处理方法及电子细分原理。将激光高阶回馈微位移测量系统与PI位移台进行了比对测试,实验结果表明系统的分辨率达到了亚纳米量级。激光高阶回馈测量系统不但分辨率高,而且还具有结构简单和价格低廉等优点,在精密位移测量中具有广泛的应用前景。
[1] King P G R.Metrology with an optical master[J].New Science,1963,17:180-182.
[2] LIU Qiang,WANG Ming,XIA Wei,et al.Implementation of real-time displacement precision measurement technology for sinusoidal phase-shifting laser self-mixing interferometer[J].Acta Optica Sinca,2014,34(6):0612011-7.(in Chinese)刘强,王鸣,夏巍,等.正弦相位调制型新型激光自混合干涉仪的实时位移测量技术[J].光学学报,2014,34(6):0612011-7.
[3] ZHU Jun,ZHAO Yan,RAO Xing,et al.A novel fiber pressure sensor based on laser self-mixing interference[J].Laser&Infrared,2007,37(9):879-881.(in Chinese)朱钧,赵燕,饶星,等.一种基于激光自混合干涉的光纤压力传感器[J].激光与红外,2007,37(9):879-881.
[4] Silvano Donati,Guido Giuliani,and Sabina Merlo.Laser diode feedback interferometer for measurement of displacements without ambiguity[J].IEEE Journal of Quantum Electronics,1995,31(1):113-119.
[5] CHENn Xiaoqing,YANG Kaiyong,TAN Zhongqi.Frequency response of optical feedback strength factor[J].Laser&Infrared,2013,43(6):615-617.(in Chinese)陈小清,杨开勇,谭中奇.光反馈光强度参数的频率响应[J].激光与红外,2013,43(6):615-617.
[6] GUO Dongmei,WANG Ming.Self-mixing interferometry based on a double-modulation technique for absolute distance measurement[J].Applied Optics,2007,46(9):1486-1491.
[7] Olivier D Bernal,Usman Zabit,Thierry Bosch.Study of laser feedback phase under self-mixing leading to improved phase unwrapping for vibration sensing[J].IEEE Sensors Journal,2013,13(12):4962-4971.
[8] TAN Yidong,ZHANG Shulian,LIU Weixin,et al.Intensity modulation in single-mode microchip Nd∶YAG lasers with asymmetric external cavity[J].Chinese Physics,2007,16:1020-1027.
[9] YU Yanguang,CHENG Ming,QIANG Xifu.Self-mixing interference effects in a laser diode with multiple optical feedback[J].Acta Optica Sinic,2001,21(9):1093-1098.(in Chinese)禹延光,程明,强锡富.多重光反馈的激光自混合干涉[J].光学学报,2001,21(9):1093-1098.
[10]MAO Wei,ZHANG Shulian,FEI Ligang,et al.High-frequency intensity modulation in orthogonal polarized dual frequency lasers with optical feedback[J].Applied Optics,2006,45(33):8500-8505.
[11]ZHANG Shulian,FEI ligang,LIU Weixin,et al.Nano-width interference fringes of laser feedback[J].Infrared and Laser Engineering,2008,37(2):208-211.(in Chinese)张书练,费立刚,刘维新,等.激光回馈纳米级宽度干涉条纹[J].红外与激光工程,2008,37(2):208-211.
[12]ZENG Zhaoli,ZHANG Shulian,WU Yun,et al.High density fringes and phase behavior in birefringence dual frequency laser with multiple feedback[J].Optics Express,2012,20(4):4747-4752.
