垂直不均匀分层的地基GPS层析水汽研究
2015-03-28陈宏斌熊永良陈志胜徐晓莉葛玉辉
陈宏斌,熊永良,陈志胜,徐晓莉,葛玉辉
(1.西南交通大学 地球科学与环境工程学院,四川 成都611756;2.铁道第三勘察设计院,天津300142;3.四川省气象信息中心,四川 成都 610072)
水汽分布是动态变化的,它和长时间持续性降水、热带气旋、中纬度气旋风暴和雷电暴雨等气象现象密切相关。这些灾害性的天气现象可能给社会经济造成巨大的损失,因而对水汽分布进行建模和监测是一项具有重要意义的工作,传统的水汽探测方法难以获得较长时间和较高空间分辨率的水汽信息,影响数值天气预报模式的精度。目前,地基GPS作为一种新兴的技术应用于探测水汽领域,具有精确、自动、快速、成本低、不受气候情况的影响并且可全天候观测的优势。本文利用四川地区的部分GPS数据,对上空的水汽三维分布进行层析实验研究。在对水汽进行层析之前,要根据构建的GPS网络合理的划分层析网格。划分的网格的几何结构会对层析结果产生影响,所以要尽可能的使各个测站均匀地分布在各个网格里。在垂直方向上,Flores等[1]研究表明GPS层析水汽的最小垂直分辨率为0.3 k m,Troller等[2]也研究过垂直分辨率的问题,毕研盟[3]曾对北京地区GPS层析水汽进行过不同垂直分辨率的研究,但大多都采用垂直均匀分层的方法来进行层析水汽研究,Bastin[4]和Roh m等[5]研究了垂直不均匀分层方法,层析结果较好,但是都没有给出统一的结果来说明垂直时如何分层层析结果最好。本文考虑到水汽分布的不均匀特点,认为垂直不均匀分层更符合大气水汽的实际分布,依据大气水汽随着高程变化的特点,提出一种垂直不均匀分层方法,与均匀分层进行对比研究,重点研究不同垂直分层方法对层析结果的影响。
1 垂直不均匀分层的GPS水汽层析方案设计
本文选取四川省内巴中、达县、广安、南江、营山5个GPS观测站组成的GPS观测网络,采用2014年2月5~6日两天3个时段的观测数据来进行水汽三维层析的研究。5个观测站都有实测的气象资料,其中达县站有探空资料。
1.1 水汽层析数据获取方案
本文采用快速精密星历和快速精密钟差,利用非差方法获取天顶对流层延迟,结合本文实际情况,高度角设为10°,选取NMF映射函数,采用投影法,每1 min计算一次斜路径对流层湿延迟,然后转换为斜路径水汽[6-10]。
1.2 层析网格划分方法
1)水平区域网格划分方法。网格边长s与卫星截止高度角e和层析高度h的函数关系:s≤h/tan e。当网格边长大于这个限制时,测站接收到的所有信号射线在地面的投影都将会在一个网格内。当层析高度为8 k m,高度角为10°时,边长最大为45 k m。因此本文水平区域网格划分方案如下:经度方向范围为E106°20′~E107°40′,每隔20′划分一个网格,共分为4个网格;纬度方向范围为N30°24′~N32°24′,每隔20′划分一个网格,共分为6个网格。将站点坐标投影到平面获得站点平面坐标,x方向划分6个网格,每个网格长度约40 k m,y方向划分4个网格,每个网格长度约40 k m,水平网格划分如图1所示。
2)垂直方向分层方法。在垂直方向上,10 k m以上的水汽密度一般小于0.1 g/m3,几乎可以忽略。本文重点研究低层大气水汽的分布情况,所以以测站上空8 k m为上顶,以达县站作为分层的参考面,采用垂直均匀分层和不均匀分层两种方法进行实验。方法一:垂直方向均匀分层,垂直分辨率为1 k m,共分为8层:方法二:根据大气水汽随高程变化的特点,提出以下划分方法:测站到测站上空1 k m处采用线性模型,分两层,每层高度0.5 k m。测站上空1~8 k m采用指数模型。由观测前一周的探空数据统计拟合得到高度与水汽密度的函数关系h=8.210 1e-0.3239x,其中x为平均探空水汽密度。1 k m处的平均探空水汽密度为6.5 g/m3,8 k m处的平均探空水汽密度为0.08 g/m3。当x分别取5,4,3,2,1时,垂直不均匀分层各层高度为0.5 k m、1 k m、1.6 k m、2.3 k m、3.1 k m、4.3 k m、6 k m、8 k m。总共也分为8层,垂直分辨率依次为0.5 k m、0.5 k m、0.6 k m、0.7 k m、0.8 k m、1.2 k m、1.7 k m、2 k m。总共划分的网格数为:6×4×8=192。对比两种垂直分层方法,研究分析方法二提出的垂直分层方法的合理性。
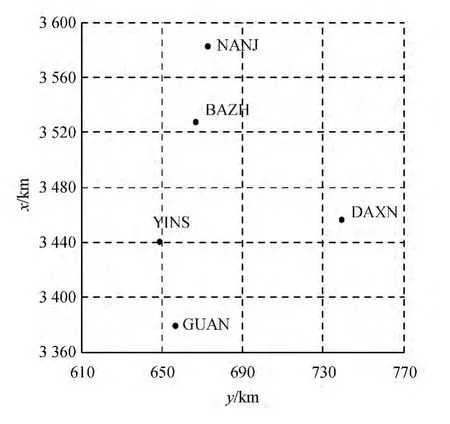
图1 四川省GPS观测网层析网格划分图
1.3 层析方程组的建立
假定1 h内各个网格内的水汽分布均匀并且水汽密度为常数,则GPS信号斜路径上的水汽量为

式中:SWVm是第m个GPS信号斜路径上的水汽含量;Lmi,j,k是第m 个 GPS信号穿过的第(i,j,k)个网格的长度;Xi,j,k是第(i,j,k)个网格的水汽密度。
1.4 层析方程组的解算
GPS卫星分布不均匀,导致GPS信号不能均匀地穿过层析网格,再加上层析网格结构的特点,不能保证每个网格内都有GPS信号穿过,于是得到的上述层析方程是秩亏的,无法求得唯一解。Kal man滤波算法不受水平和垂直约束条件的限制,仅依赖于GPS观测数据和状态噪声的方差协方差,所以,该算法在一定程度上避免了解算方程时出现的病态问题。本文采用Kal man滤波算法计算网格的水汽密度值。采用对应观测时刻的探空水汽密度的平均值作为层析初值,测量误差协方差R通过统计观测值给出。状态噪声方差Q通过分析各个高度层探空结果时间序列和指数递减形式给出[11]。由于某些网格内无GPS信号穿过,假设一个小的范围内,水汽的水平分布是平稳的,通过水平方向的高斯平滑对无信号穿过的网格的水汽密度值进行拟合,获取所有网格的层析水汽密度值。
2 垂直不均匀分层层析结果分析
以达县站为例,计算出2014-2-5T12:00,2014-2-6 T00:00及T12:00的各层的水汽密度,与探空资料得到的水汽密度进行对比,两种垂直分层方法得到的水汽密度层析廓线与探空廓线的对比结果如图2~图4所示。在图2~图4中左侧图为垂直分辨率为1 k m的均匀分层的层析结果,右侧图为垂直不均匀分层的层析结果,其中星号线代表的是利用Kal man滤波层析得到的水汽密度廓线,圆圈线代表的是利用探空资料计算得到的水汽密度廓线。
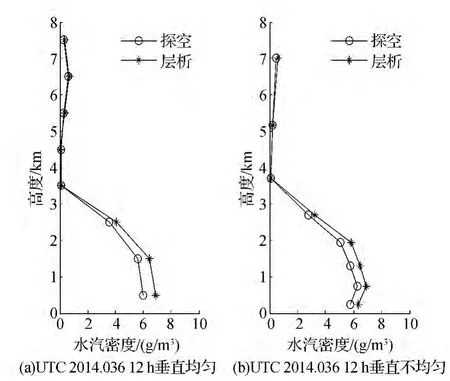
图2 DAXN站2014.2.5 12:00层析结果
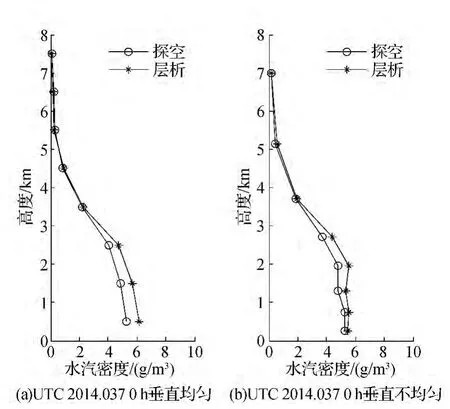
图3 DAXN站2014.2.6 00:00层析结果
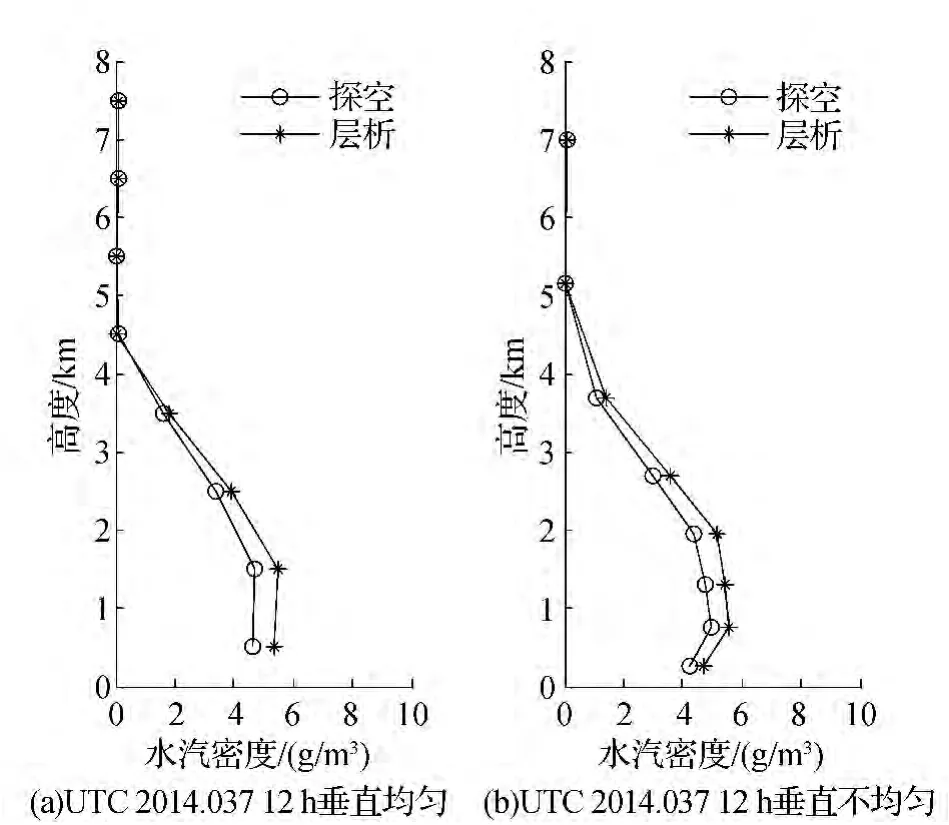
图4 DAXN站2014.2.6 12:00层析结果
由图2~图4可见,两种分层方法得到的达县站的层析水汽密度廓线与探空水汽密度廓线符合的都比较好,相关系数都达到0.99,均匀分层层析得到的各层水汽密度的均方根误差最大为最底层(0~1 k m)的0.855 2 g/m3。不均匀分层层析得到的各层水汽密度的均方根误差最大为第四层(1.6~2.3 k m)的0.753 7 g/m3。表1、表2分别给出均匀分层与不均匀分层计算的各层水汽密度层析值的均方根误差,列出的各层均方根误差为图2~图4三个时段相应层的均方根误差的平均值。可以看出3 k m以下对应高度层的不均匀分层的均方根误差要小于均匀分层,由于水汽密度值本身比较小,所以两种方法的均方根误差相差不是特别明显。低层的误差相对高层的较大,这主要是低层水汽密度比高层要大。另外,不均匀分层计算的高层的水汽密度层析值的均方根误差大于均匀分层的结果,这是因为高层的垂直分辨率要比均匀分层的大。水汽主要集中在对流层中低层,高层的水汽密度值较小,所以对于高层水汽的分布,两种分层方法得到的层析结果影响不大。
以上表明,在相关系数都很高的情况下,垂直不均匀分层得到的层析结果要好于垂直均匀分层得到的层析结果,与探空水汽结果更吻合。由于水汽主要集中在对流层中低层,对流层低层的垂直分辨率相对较高,采用垂直不均匀分层方法得到的大气水汽的变化特征更加细致,这一点可以从图中看出。考虑到水汽分布的不均匀特点,认为垂直不均匀分层更符合大气水汽的实际分布,得到的层析结果更能反映出对流层低层大气水汽的变化特征,说明本文提出的垂直不均匀分层方法是可行有效的。

表1 均匀分层计算的各层水汽密度层析值的均方根误差

表2 不均匀分层计算的各层水汽密度层析值的均方根误差
3 四川省GPS水汽三维层析结果
采用垂直不均匀分层方法,利用Kal man滤波对四川省5个GPS观测站点组成的网络进行水汽三维分布的层析实验,其结果如图5所示。
图5给出四川省GPS网络2014年2月5~6日三个时段的水汽三维分布层析图,从三维水汽层析分布图可以直观而清晰看出水汽主要集中在3 k m以下区域,中低层水汽量大,分布不均匀,高层水汽量较小,分布也较为均匀,3 k m以上总体上随着高度增加水汽量逐渐减少,但其中也可能会出现逆湿的反复现象。
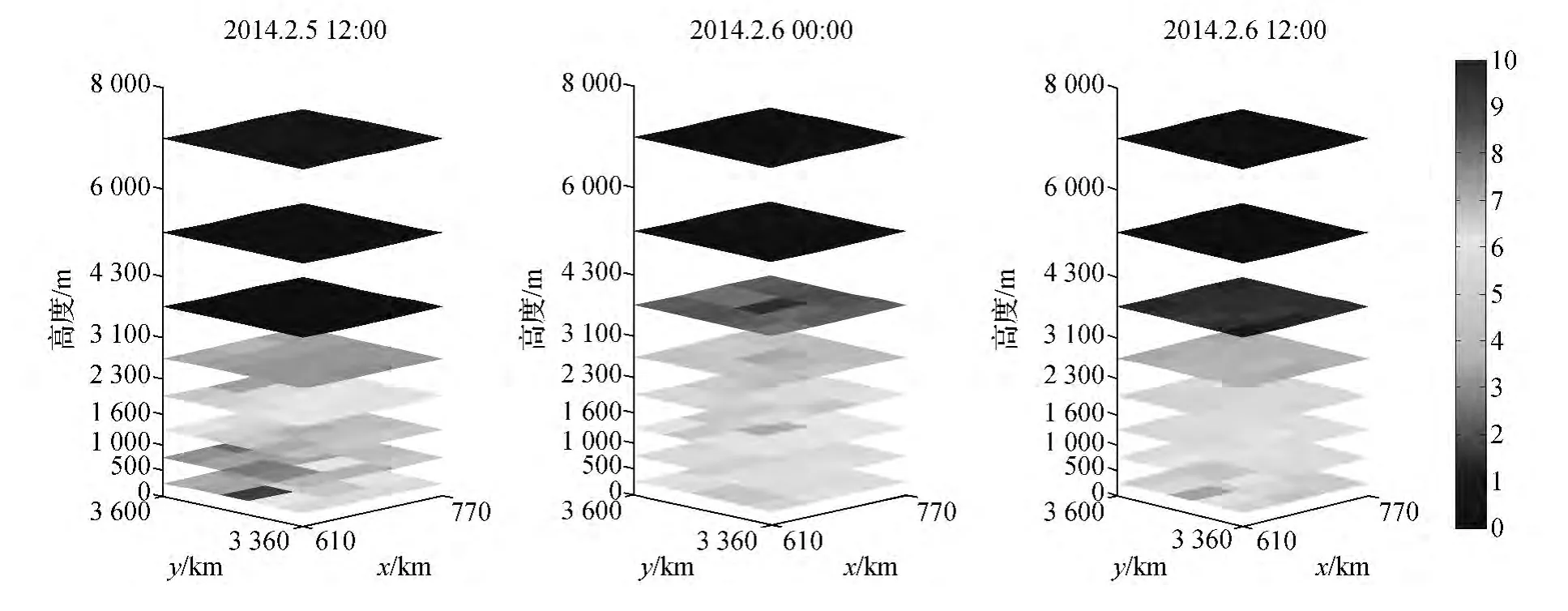
图5 四川地区GPS网络水汽密度三维分布层析图/(g/m3)
4 结束语
本文利用四川省地区GPS网络数据,实验研究垂直不均匀分层方法对层析结果的影响,结果表明垂直不均匀分层得到的层析结果要好于垂直均匀分层得到的层析结果,与探空水汽结果更吻合,得到的层析结果更能反映出对流层低层大气水汽的变化特征。四川省地区的水汽层析实验研究结果验证本文提出的垂直不均匀分层方法的可行性和有效性。最后给出四川省地区GPS网络的水汽三维分布层析图,说明水汽主要集中在3 k m以下区域,中低层水汽量大,分布不均匀,高层水汽量较小,分布也较为均匀,3 k m以上总体上随着高度增加水汽量逐渐减少,但其中也可能会出现逆湿的反复现象。
[1] FLORES A,RUFFINI G,RIUS A.4D tropospheric to mography using GPS slant wet delays[J].Annales Geophys-icac,2000,18(2):223-234.
[2] TROLLER M,GEIGER A,BROCK MANN E.To mographic deter mination of the spatial distribution of water vapor using GPS observations[J].Advances in Space Research,2006,37:2211-2217.
[3] 毕研盟,毛节泰,毛辉.海南GPS网探测对流层水汽廓线的实验 研究[J].应用气象学报,2008,19(4):412-419.
[4] BASTIN S,CHA MPOLLION C,BOCK O,et al.On the use of GPS tomography to investigate water vapor variability during a Mistral/sea breeze event in southeastern France[J].Journal of Applied meteorology and Cli matology,2005,46(2):167-182.
[5] ROH M W,ZHANG K,BOSY J.Unconstrained robust Kal man filtering for GNSS troposphere tomography[J].At mospheric Measurement Techniques,2013,6:9133-9162.
[6] 蒋光伟,田晓静,王斌,等.高精度GNSS服务中对流层映射函数的影响性分析[J].测绘工程,2013,22(5):13-15.
[7] 陈澍,熊永良,张绪丰,等.GPS水汽反演技术在四川地区的应用研究[J].全球定位系统,2011,36(1):32-37.
[8] 江鹏,叶世榕,何书镜,等.自适应Kal man滤波用于GPS层析大气湿折射率[J].武汉大学学报:信息科学版,2013,38(3):299-302.
[9] 徐韶光,熊永良,刘宁,等.利用地基GPS获取实时可降水量[J].武汉大学学报:信息科学版,2011,36(4):407-411.
[10]何林,柳林涛,刘金钊,等.空间水汽场重建算法对比研究[J].测绘科学,2014,39(10):17-21.
[11]叶世榕,江鹏,刘炎炎.地基GPS网层析水汽三维分布数值积分方法[J].测绘学报,2013,42(5):654-660.