MEMS 陀螺在航天器控制系统中的应用评述
2015-03-27施常勇
施常勇,张 肖
(1.上海市空间智能控制技术重点实验室,上海200233;2.上海航天控制技术研究所,上海200233)
0 引 言
微机电系统(micro-electro-mechanical system,MEMS)陀螺是20 世纪80 年代出现的新技术,它是陀螺技术的发展趋向,经过最近十几年的发展,MEMS 陀螺逐步从实验室研究走向市场,已在生物、医疗、交通运输、工业自动化、智能机器人、环境、监控,以及军事系统等领域得到日益广泛的应用。
MEMS 技术的发展趋势是伴随着航天器控制系统技术的发展趋势变化的,除了质量轻和功耗低外,还能够适应控制系统所要求的模块化、自适应和可重构的特点[1],可以用于飞行时间较短的微小卫星,对大型卫星已有功能的监测,以及更高的风险性的通信卫星中[2,3]等。文献[4]重点分析了MEMS 技术在微型航天器中的应用,指出了其在航天器推进、控制、数据存储、热控和能源等分系统中的发展前景,并介绍了目前我国在航天MEMS 技术方面的研究情况。文献[5]描述了商业级MEMS 器件在空间的应用,指出MEMS 技术在高可靠性的应用可以显著地节约成本,文章重点介绍了商业级MEMS 器件的失效模式,如黏附和蠕变失效、热循环、振动、冲击、辐照效应等引起的失效和周期性机械疲劳等。
本文研究了MEMS 陀螺空间应用的优势和空间环境适应性,包括真空、冲击、温度、辐射等影响,并分析MEMS在控制系统中应用途径,如,组合定姿和故障诊断等,为MEMS 陀螺研究方向提供了参考。
1 MEMS 陀螺空间应用技术优势
根据微陀螺仪的原理不同,可以将其分为哥氏加速度效应微振动陀螺、流体陀螺、固体微陀螺、悬浮转子式微陀螺、微集成光学式陀螺以及原子陀螺[6]。微振动陀螺仪是最早使用的MEMS 陀螺,也是目前市场上使用最多且相对较成熟的陀螺仪,其原理是:利用哥氏力的作用原理,把输入角速度量转换为一种位移,然后通过电容或压电等方式将其检测出来,与传统高精度的机械陀螺或光学陀螺相比,MEMS 陀螺具有如下独特的优势:
1)微型化和集成化
MEMS 陀螺一般是由硅基材料和利用半导体集成电路制造工艺制造而成的集微机械、微电子功能高度综合的传感器系统,其结构不仅非常小,且重量轻,美国Draper 实验室研制的微惯性器件边长小于1 mm,芯片质量仅为1.2 mg。此外,其与集成电路的兼容性好,具有良好的EMC/EMI 性能,提高了可靠性。MEMS 器件实物如图1。

图1 MEMS 器件实物图Fig 1 Physical map of MEMS device
2)能耗低且易于数字化和智能化
MEMS 陀螺通常工作在真空状态下,其工作电流在10 nA级,一般能耗在μW ~mW 级,能耗非常低,其信号可以应用微处理器进行处理,尤其是谐振式MEMS 陀螺是采用频率输出方式,能对输出信号进行全数字处理,消除因A/D 或V/F 变换而引入的误差。
3)动态性能好
MEMS 陀螺结构本身没有高速旋转的转子,可视为固态装置,对于硅基材料的强度、硬度和杨氏模量与铁相当,密度类似于铝,热传导率接近钼和钨,抗冲击能力强,有的甚至可承受100 000 gn以上的冲击,其响应速度快、固有频率高,从而具有良好的动态性能。
4)成本低
采用类似集成电路(IC)的生产工艺和加工过程,用硅微加工工艺在一片硅片上,可同时制造成百上千个微型机电装置或完整的MEMS 器件,使MEMS 陀螺有极高的自动化程度,可大大降低生产成本。
2 MEMS 陀螺的空间适应性分析
在轨应用期间MEMS 陀螺要经受真空、热循环、辐照等空间环境的作用,其空间环境适应性是其区别于地面MEMS 器件的一项重要质量特性,也是MEMS 陀螺空间可靠性重点考虑的因素[7,8]。
2.1 真 空
真空是航天器产品必须经历并长期运行的环境之一,对于MEMS 陀螺来说,真空的因素可以忽略,主要因为大多数MEMS 陀螺为了提高Q 值,提高输出灵敏度和隔热等,采用了真空气密性封装,且器件产生(或吸收)的热量几毫瓦数量级,因此,可以认为真空环境下,MEMS 陀螺不会受到影响。
在地面筛选时,重点应在将MEMS 陀螺的气密性检查,防止在恶劣环境中受到化学腐蚀和物理损坏一般要求湿气含量不得超过0.5%RH,漏率要小于10-8Pa.cm3/s。
2.2 热环境
热环境是影响MEMS 陀螺可靠性的主要影响因素,热冲击可导致芯片焊接失效、芯片开裂、器件内的多层剥离,但对大多数航天器来说,一般都采用了主动热控技术,保证星内环境温度在-20 ~+45℃,现有的MEMS 陀螺工作温度均在-40 ~+80 ℃,而对于微小卫星或皮纳卫星,星内环境则在-80 ~+100 ℃,在采取一定热保护措施下,可以满足任务的需求,但是随着深空探测的需求,MEMS 陀螺要求能够适应-100 ~+150℃,这个问题需要持续的关注和改进。
通过地面阶段的温度循环和热冲击试验,可以发现器件热匹配性能,筛选早期失效。
2.3 振动和冲击
振动和冲击常会使得MEMS 器件发生裂缝、碎裂和断裂的问题,在发射过程中,正弦振动5 ~100 Hz,加速度3 ~20 gn,在整流罩分离阶段,冲击等级达到500 gn,对某些发射任务来说,这些值还要高一些,例如:在星箭分离阶段可达2 000 gn(主要为火工品爆炸冲击),时间0.1 ms,冲击和振动影响与距离有关,如果近距的冲击会导致星载的晶体、继电器等失效或误动作。
为考核MEMS 器件的抗冲击和振动能力,美国Sandian国家实验室在MEMS 器件上加上500 ~40 000 gn的冲击试验和峰值加速度120 gn,扫描频率从20 ~200 Hz 的振动试验,测试表明:MEMS 器件具有较好的抗冲击和抗振动能力[9,10]。
通过地面进行的随机振动、正弦振动和冲击加速度筛选试验,可以有效地剔除MEMS 陀螺应用前早期失效,提高陀螺在轨应用的可靠性。
2.4 辐 照
空间的辐照环境,主要包括地球辐射带粒子、太阳宇宙线、银河宇宙线、地磁场、等离子体和原子氧等,对于不同轨道高度典型年辐照量如表1 所示。
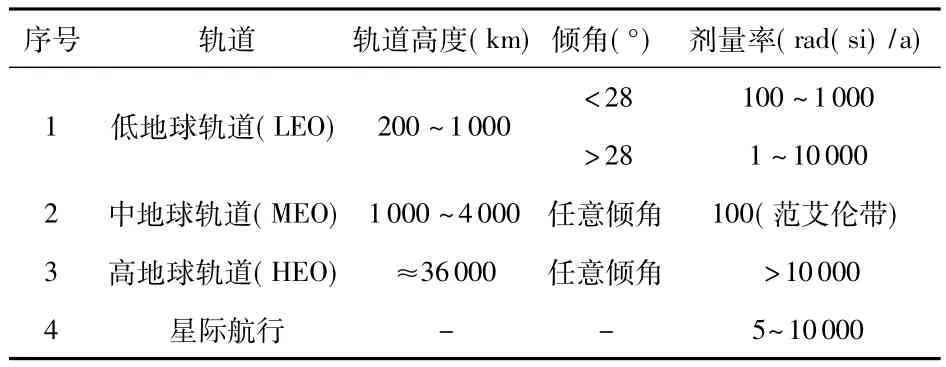
表1 不同轨道辐照剂量率Tab 1 Radiation dose rate of different orbit
空间辐照影响包括总剂量效应(TID)、单粒子效应(主要包括单粒子翻转(SEU)和单粒子锁定(SEL))、充/放电效应(ESD)等,主要会导致MEMS 陀螺发生非电离能损和电离,其中,非电离能损包括缺陷密度上升、载流子迁移率、寿命及浓度下降、电荷累积等,而电离包括电荷传输、焊接点变化和材料分解。对于硅基MEMS 陀螺,在高剂量辐照下,硅和金属的金属特性大部分都没有发生变化,本质上可认为耐辐照,对于经典工作原理的MEMS 器件,其主要失效模式是致电辐射引起的电介质层中的电荷累积。文献[11]中 总 结 了 不 同 MEMS 器 件,如 Analog Device ADXL150,VTI SCA600 加速度计等失效的最小剂量计失效模式,发现大部分基于静电原理工作的MEMS 器件在30 ~100 krad 区间发生退化,对于非封装的器件,辐照效应更明显。对QRS11 进行的总剂量(钴60,上限为80 krad)和重粒子试验(锎252,1.9×106粒子/cm2)发现没有性能退化现象,并认为可以忽略辐照对该MEMS 陀螺的影响。
目前,进行空间辐照试验的MEMS 陀螺较少,但现有的研究表明,MEMS 陀螺的耐辐照能力较强,能够适应中低轨道应用,一般辐照失效发生在COMS 输出电路,而不是陀螺本身,因此,应采用非单片集成的办法,即将处于一个封装里面的表头和读出/控制ASIC 芯片分开,且选用耐辐照的ASIC 芯片,同时通过组合加一定厚度的铝或铅皮屏蔽方式,可以有效提高MEMS 陀螺组件的抗辐照能力。
3 控制系统对MEMS 陀螺的应用
控制系统是飞行器实现在轨姿态稳定的重要分系统,陀螺是控制系统中重要的角速度敏感器,目前卫星配置的陀螺常以机械陀螺(液浮、挠性、静电)和光学陀螺(激光、光纤)为主,对于MEMS 陀螺,在控制系统中的应用途径包括:1)组合定姿;2)故障诊断;3)辅助星敏或光纤陀螺。
3.1 组合定姿
MEMS 陀螺较其它类型陀螺在精度上尚有较大的差距,表2 为目前常用机械陀螺、光学陀螺与MEMS 陀螺的精度对比,由表可见MEMS 陀螺在噪声、稳定性等性能还略显不足,表面工艺面硅和体硅微陀螺仪短时漂移,无论采样频率高低,仍出现频率繁杂、功率值不够显著的特点,此外,零偏随温度变化也有较大的漂移[12]。
但是MEMS 陀螺可以和高精度星敏和地平仪等组合应用,可以弥补精度上的不足,同时提高控制系统姿态确定的精度,常见的组合方式包括地平仪+MEMS 陀螺的轨道罗盘定姿、星敏+MEMS 陀螺组合和MEMS 陀螺+太阳敏感器+磁强计[13]等。

表2 不同类型陀螺性能Tab 2 Performance of different type gyros
3.2 故障诊断
故障诊断是控制系统一项重要的工作,主要是识别故障陀螺并有效隔离,硬件冗余的故障诊断方法检测原理简单,不需要了解系统的数学模型,检测速度快且比较准确,常见的故障诊断办法有主备份判故、三取二判故等,因此,可以利用MEMS 陀螺轻巧的优势,既不增加系统太多的重量和功耗,又可以快速地进行故障诊断,提高故障诊断效率,一般来讲用于故障诊断的陀螺精度要求不高,20°/h 的漂移也能够满足应用需求。
3.3 辅助星敏定姿和光纤陀螺处理跨条纹
星敏是控制系统提高指向精度的重要敏感器,MEMS 陀螺除了可以与星敏配合进行组合定姿外,还可以辅助星敏进行星图快速匹配,利用陀螺测量的角速度,进行星点运动轨迹预测,从而更加快速地匹配星图;在丢失星点期间,也可以通过MEMS 陀螺进行记忆星点的外推,可以提高星捕获和匹配概率。
正如表2 所列,光纤陀螺具有较高的精度,但是光纤陀螺的精度和量程是一对矛盾参数,在高精度需求的情况下,需要较长的光纤环,量程却受限,此时,可以通过光纤跨条纹技术来增加量程,但跨条纹技术仅适用于连续测量过程,一旦出现断电或异常时,将无法继续测量,甚至会出现错误测量,此时,可以借助MEMS 陀螺来实现大角速度测量,对光纤陀螺数据进行修正,从而保证光纤陀螺大量程高精度测量。
4 国内外应用情况与启示
MEMS 陀螺美国、欧洲和日本等国研究水平最高,美国国家自然科学基金(NSF)、国防部高级研究计划局(DAPRA)、美国宇航局(NASA)、欧空局(ESA)和日本宇航航空研究开发机构(JAXA),以及各大商业公司,如,美国TI 公司,AD 公司,BEI 公司;英国BAE systems;挪威的SensoNor等公司都投入了大量的资金进行MEMS 技术的空间应用验证研究,控制系统中应用MEMS 陀螺的卫星有SERVIS—1,Swiss Cube,CryoSat—2,Integral,Smart—1,SDS—1 等。我国在MEMS 陀螺领域的研究起步较晚,经过“九五”~“十二五”近十几年的努力,关键技术研究有长足的进步,性能有大幅提高,清华大学、电子科技集团26 所和13 所、东南大学、上海微系统所、上海航天控制技术研究所等单位已经研制出具有一定精度的MEMS 陀螺样机,但在航天器控制系统应用较少,仅有浙江大学ZDPS—1 卫星[14]和上海航天技术研究院“萤火一号”火星探测器[15]。
目前已应用于控制系统的MEMS 陀螺参数如表3 所示。
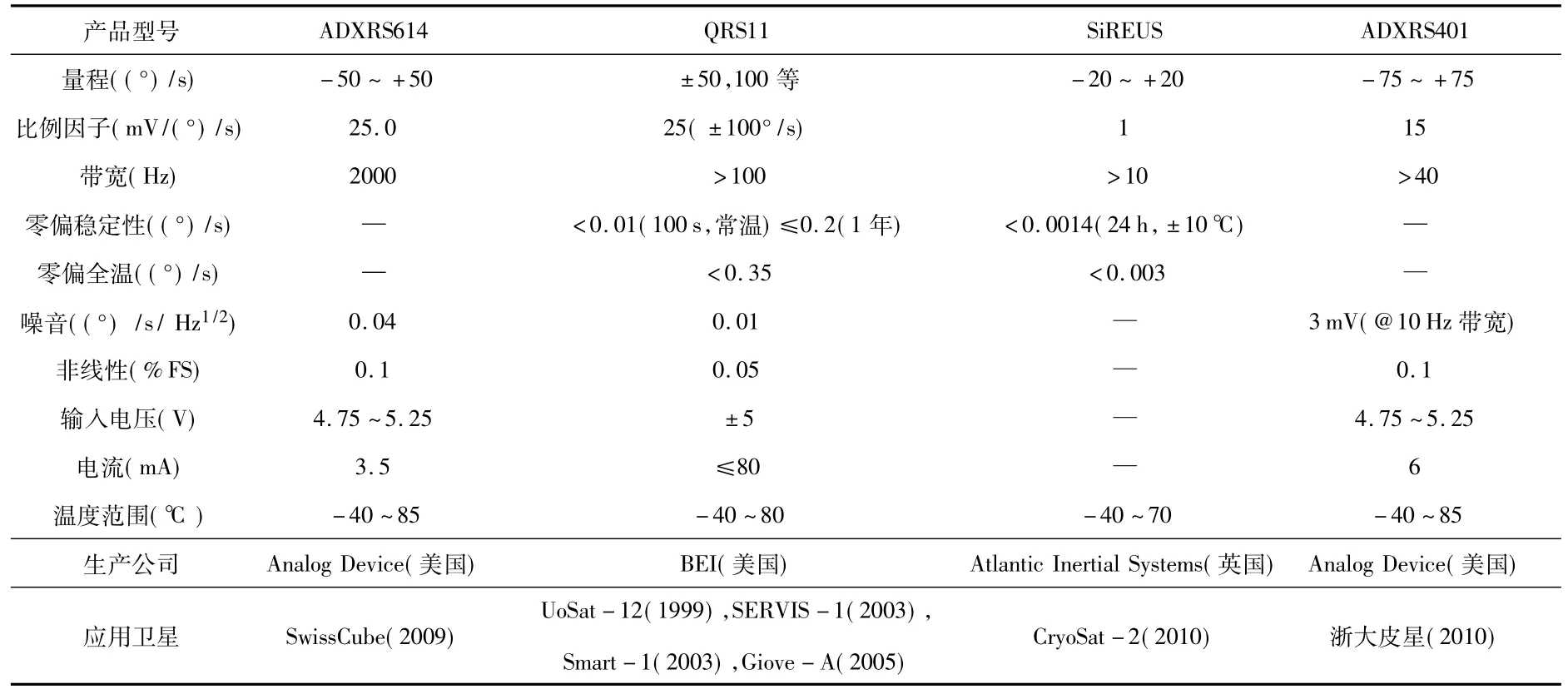
表3 航天器控制系统中MEMS 陀螺Tab 3 MEMS gyros in control system of spacecraft
从国内外发展现状来看,航天器控制系统用MEMS 陀螺尚处于早期试验验证阶段,主要应用在一些新技术飞行器(微小卫星或皮卫星等),国外也开始进行长寿命高价值卫星的MEMS 应用,但目前国内的卫星还鲜见应用。
5 结束语
综观航天技术的发展史可以发现:卫星等各种航天器的主要开发动力是军用需求,开发成功后随着技术发展而扩展到民用;民用市场的扩展促进了技术的发展,降低了成本;在商业化竞争中,成本和可靠性成为同样重要的因素。
现有的研究和应用表明:MEMS 陀螺可靠性较研究初期已有了较大的提高,可适应空间环境等应用需求,在控制系统中可用于组合定姿、故障诊断和辅助星敏或光纤陀螺等。
[1] 周凤岐,刘智平,周 军.硅微技术在导航、制导与控制中的应用及发展趋势[J].测控技术,2007,26(3):5-7.
[2] 申 坤.微机电系统技术及其在航天器上的应用展望[J].空间控制技术与应用,2008,34(1):56-59.
[3] Rooij N F de,Gautsch S,Briand D,et al.MEMS for space[C]∥Solid-State Sensors,Actuators and Microsystems Conference,2009 International Transducers,Denver,Co,USA:17-24.
[4] 孙 杰.MEMS 技术的发展及其在航天领域的应用研究[J].航天标准化,2010(3):44-47.
[5] Rajeshuni Ramesham,Reza Ghaffarian,Namsoo P Kimb.Reliability issues of COTS MEMS for aerospace applications[C]∥SPIE Proceedings,1999:83-88.
[6] 成宇翔,张卫平,陈文元,等.MEMS 微陀螺仪研究进展[J].微纳电子技术,2011,48(5):277.
[7] Herbert R Shea.Reliability of MEMS for space applications[C]∥Proc of SPIE the International Society for Optical Engineering,2006:A61110.
[8] Kin F Man.MEMS reliability for space applications by elimination of potential failure modes through analysis[C]∥Proceedings of the 1999 MEMS Reliability for Critical and Space Applications,Santa Clara,1999:120-128.
[9] Stikar V T,Senturia Stephen D.The reliability of micro-electromechanical systems(MEMS)in shock environments[J].Jounal of Micro-electro-mechanical Systems,2002,11(3):203-214.
[10]Tanner Danelle M,Walraven Jeremy A,Helgesen Karen S,et al.MEMS reliability in a vibration environment[C]∥38th IEEE International Reliability Physics Symposium,San Jose,2000:139-145.
[11]Herbert R Shea.Radiation sensitivity of micro-electro-mechanical system devices[J].Shea J Micro/Nanolith MEMS/MOEMS,2009,8(3):031303—1-031303—11.
[12]李凌宇,卢 翌,陈 兴,等.微机械陀螺仪设计与研究[J].电子科技,2013,26(9):172-176.
[13]蒙 涛,王 昊,金仲和,等.基于低成本MEMS 传感器的皮卫星融合定姿算法研究[J].宇航学报,2009,30(4):1569-1573.
[14]Yang Mu,Wang Hao,Wu Chang ju,et al.Space flight validation of design and engineering of the ZDPS-1A pico-satellite[J].Chinese Journal of Aeronautics,2012(5):725-738.
[15]尹海宁,周连文,袁彦红,等.萤火一号火星探测器姿态控制分系统设计[J].上海航天,2013,30(4):64-68.
