基于双频GPS 的微小型标校用信标球
2015-02-23王慧泉金仲和
钟 东,王慧泉,金仲和
(浙江大学 微小卫星研究中心,浙江 杭州310027)
0 引 言
随着我国航天事业的发展,各类航天器监控和通信设备需求量日益增加。为确保雷达、地面站设备正常工作,这些设备在投入使用前必须进行精度标定。目前用于地面测控设备和雷达标校的方法有:标校塔标校、飞机标校、卫星标校、信标球标校等。
标校塔标校是最常用的静态标定方法,标校塔一般建立在地面监控系统周围的高地或者建筑物顶部,通过地面测控系统与塔上设备进行数据交互验证地面测控系统是否正常,再通过塔上设备对地面设备进行标定[1,2]。然而许多设备在应用时附近并无可用标校塔,所以,需要大力发展无塔标校技术。
飞机校飞是一种常用的无塔标校技术,一般以全球定位系统(GPS)为精度鉴定设备,可检验地面雷达或测控设备的动态跟踪性能,并精确鉴定其测角精度和测距精度。但是飞机校飞存在以下不足:需对飞机进行改造[7],确认电磁兼容,以保证飞机安全性,同时消耗大量人力物力。
卫星标校是近年来发展的新标校方法,分为两种:一种是通过已发射的在轨卫星进行标校,此方法所需额外投入资源少,实施简单便捷,但是覆盖率会受到卫星本身飞行轨迹的影响,同时其携带的通信设备也不一定能够满足标校需求[8];另一种是研制专用标校卫星进行标校,但时间、人力、物力消耗极大。
传统信标球标校一般是利用金属反射体的气球来检测雷达的光电偏差和设备动态跟踪性能、空间定向的灵敏度[3~6]。但标校功能单一,无法提供目标实时精确位置信息。
本文设计并实现了基于双频GPS的信标球,可以进行动态标校,对标校地点无特殊要求。相对于飞机标校,其释放简单、方便,并可实现优于1m 的定位精度,同时该信标球携带了UCB 测控应答机,可用于地面雷达和UCB 测控设备相互校准。
1 信标球设计与实现
1.1 方案设计
基于GPS 的微小型信标球以自制微小型双频GPS 和UCB 应答机为核心模块实现,整个系统重1 kgf,功耗10 W。主要由双频GPS 接收模块、UCB 测控应答机模块、综合电子模块、锂电池模块构成,各模块均采用PCB 单板设计。标校系统剖面如图1。

图1 标校系统剖面图Fig 1 Sectional diagram of calibration system
综合电子模块作为信标球主体控制单元对双频GPS数据进行自主存储与传输管理。双频GPS 对信标球进行自定位,并将自定位数据和原始测量信息传输给综合电子;UCB 测控应答机负责数据下传。信标球工作框图如图2。本系统的核心模块为GPS 模块和UCB 应答机模块。

图2 信标球Fig 2 Beacon ball
1)双频GPS
双频GPS 模块由射频芯片、FPGA 及ARM 组成。FPGA 完成射频芯片配置、自动增益控制、GPS 信号捕获和跟踪功能;ARM 完成测量信息的提取与实时解算,结果通过FPGA 定时向综合电子模块输出。
GPS 捕获频率搜索范围为-40 ~40 kHz,频率搜索步进为500 Hz。L1 和L2 频点捕获器独立,各自完成对应频点卫星信号的捕获。跟踪部分由12 个L1 通道和12 个L2通道组成,各通道独立完成对应信号的跟踪。跟踪控制部分完成同步测量信息和解调电文采集,并将对应数据送入ARM 进行处理。
ARM 对接收到的数据进行解调,得到位置、伪距等信息,并以10Hz 更新速率输出定位结果和原始测量信息。双频GPS 接收机结构框图如图3。
2)UCB 测控应答机
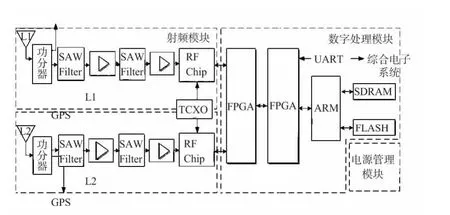
图3 GPS 整体结构框图Fig 3 Block diagram of GPS overall structure
UCB 测控应答机由射频发射、射频接收、数字信号处理等3 个模块组成。主要负责遥控指令接收和GPS 数据、信标球遥测数据下传,同时具有测距功能。其结构如图4所示,射频接收模块采用一次下变频,把接收到的射频信号变换到中频,并进行滤波、放大和模拟AGC 处理,然后直接对中频信号进行带通欠采样,并送给数字处理模块进行信号处理。而射频发射模块采用二次上变频,由数字处理模块产生低中频全数字调制信号,然后经二次上变频,形成下行发射信号。所有本振采用分频式锁相环芯片,本振和FPGA 的频率源由TCXO 提供。数字处理模块是应答机的核心,由FPGA 来完成。上行接收采用UCB 体制,数字处理模块完成载波同步、侧音测距转发、遥控信号解调、载波相干转发及测距遥测调制。图4 为应答机结构框图。

图4 应答机整体结构框图Fig 4 Overall structure block diagram of transponder
1.2 测量与设备相互校准
信标球携带的UCB 测控应答机可以配合地面C 波段测控设备进行信标球距离、速度测量,该测量结果可与地面雷达测试结果进行相互校准。
2 实验测试
2.1 系统验收测试
信标球在执行任务过程中随着飞行高度的提升,所处环境温度持续下降;同时由于风的作用,会承受摆动和震动条件。为确保信标球能够可靠工作,对信标球进行了严格测试。对各模块进行了功能、性能测试;对模块间接口进行了容差容错测试;针对温度变化环境进行了20 个-20 ~60 ℃高低温循环测试;针对振动环境进行了正弦、随机、冲击等力学试验。标校球在所有试验中工作正常。
2.2 定位精度测试
将信标球固定在某一位置,通过双频GPS 采集信标球位置信息,时长2h,每秒采集1 次,共计7200 组数据,最后通过Matlab 对数据进行处理,定位误差结果如图5、图6 所示。

图5 坐标定位信息Fig 5 Axis coordinate localization information
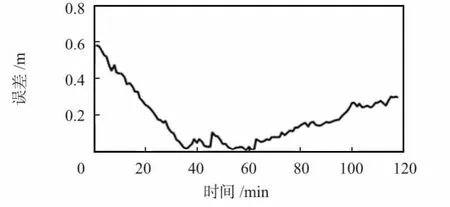
图6 空间距离定位信息Fig 6 Positioning information of spacial distance
图5 表明:各轴向定位精度达0.5 m;图6 表明:空间定位精度达0.6 m。由此可见,该系统可实现优于1 m 的定位精度。
2.3 放飞测试
无风晴朗的天气状况下在某基地进行了信标球放飞实验,整个飞行过程中地面测控设备均可接收到信标球下发数据,信标球工作正常。但是由于气球遮挡住双频GPS 接收天线,导致双频GPS 接收到的信号低于其接收灵敏度,双频GPS 无原始测量信息和定位结果输出。实验过程如图7、图8 所示。
3 结 论
针对日益繁重特别是特殊环境标校任务需求,提出并实现了微小型信标球。信标球重1 kg,功耗10 W,定位精度优于1 m。携带的UCB 测控应答机可作C 波段地面测控设备合作目标,用于地面测控设备雷达和UCB设备相互较准。该信标球释放简单便捷,有望得到广泛应用。

图7 放飞准备过程Fig 7 Preparation process of flying
[1] 钟德安.航天测量船测控通信设备标校与校飞技术[M].北京:国防工业出版社,2009.
[2] 韦庆洲,路 平,汪连栋.动态差分GPS 测量进行标校塔变形监测[J].测绘科学技术学报,2010,27(2):86-87.
[3] 诚 宏.基于联合放球的船载雷达角度零值标校方法[J].飞行器测控学报,2009,28(4):23-25.
[4] 李辉芬,朱伟康,李红艳,等.基于非规律变化信标球数据的精度检验新方法[J].电讯技术,2012,52(8):1269-1274.
[5] 毛南平,徐昌庆,张忠华.船载测控雷达海上无塔校相技术[J].电讯技术,2004,44(1):第38-43.
[6] 何光林.弹载GPS 弹道测量系统的设计[J].兵工自动化,2002,21(5):25-29.
[7] 田建学,魏俊淦.雷达校飞设备在飞机上的安装[J].计测技术,2009,29(1):21-23.
[8] 徐兴源,梁光斌.船载遥测设备海上跟踪同步星标校的方法[J].遥测遥控,2007,29(11):223-227.

图8 标校球飞行过程Fig 8 Flying process of calibration ball
